(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Автомат-настройщик для систем управления | 1980 |
|
SU924669A1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| Самонастраивающаяся система | 1981 |
|
SU1013910A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО С ЭТАЛОННОЙ МОДЕЛЬЮ | 1972 |
|
SU328433A1 |
| Устройство для компенсации емкостногоТОКА уТЕчКи | 1979 |
|
SU805464A1 |
| Самонастраивающаяся система с эталонной моделью | 1979 |
|
SU864244A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
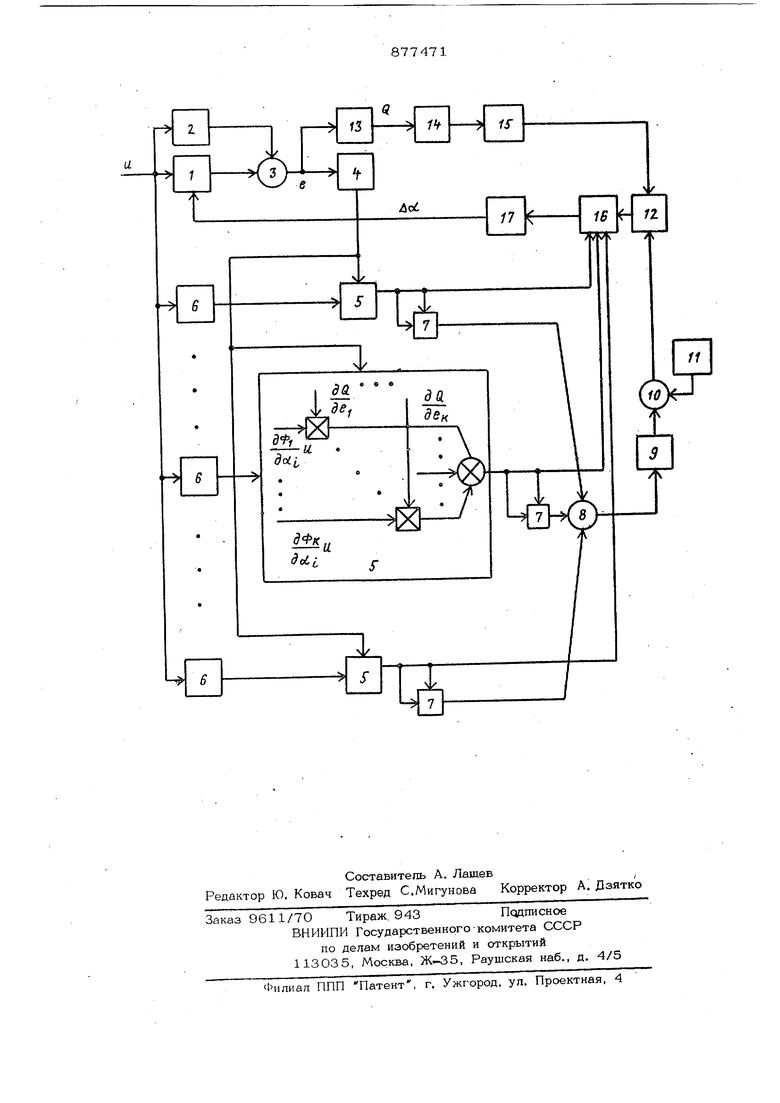
Изобретение относится к автоматичес -кому управлению и регулированию и может быть использовано при построении систем автоматического управления и стабилизации раз)гачного назначения, в частности, в автопилотах, авторулевых, промьпиленных регуляторах. Известны самонастраиваюшиесй .системы с эталонной моделью, содержащие основной контур (ОК) управления, эталонную модель основного контура, блок вычисления ошибок настройки - разностей выходных сигналов эталонной модели и ОК, бло формирования частных производных критерия настройки по ошибкам настройки, бло ки вспомогательных операторов, блоки перемножения и суммирования и блоки интегрирования скоростей перестройки параметров l3,. Недостатком таких систем является влияние формы и амплитуды управляющего воздействия на качество процессов настро ки. Наиболее близкой к предлагаемой по технической сущности является самонастраивающаяся .система с эталонной моделью, содержащая последовательно соединенные основной контур управления, блок сравнения, блок формирования частных производных, выход которого соединен с первыми входами блоков умножения и суммирования, своими выходами подключенных к соответствующим первым входам блока умножения, а через соответствующие квадраторы - с соответствующими входами пер)- вого сумматора, выход блока умножения соединен через интегратор с йервым входом основного контура управления, второй вход которого соединен через эталонную модель со вт.орым входом бпокэ сравнения, а через блоки .вспомогательного one- ратора - со вторыми входакга соответствующих блоков умножения и суммирования 23, К недостаткам этой системы следует отнести неопределенный характер функционирования системы при стремлении к нулю ошибок настройки и существенное схекдаоконструктивное усложнение системы .при увеличении чиспа перестраиваемых параметров, в частности, пропорциональное увеличение чиспа блоков деления числу перестраиваемых параметров, а также малую УСТОЙЧИВОСТЬсистемы. Цель изобретения - повышение устойчивости системы при сохранении высокого качества работы системы за счет малого влияния формы и уровня управляющего воздействия на процессы адаптации и придания процессу настройки по критерию настройки характера, близкого к заданному экспоненциальному, повышающему устойчивость системы. Указанная цель достигается тем, что в систему введены источник смещения и по- следоватетйзно соединенные первый сглаживающий фильтр, второй сумматор и. блок деления, а также последовательно соединенны вычислитель критерия настройки, второй сг живающий фильтр и усилитель, выход ко-торого соединен со вторым входом i блока деления,) связанным своим выходом со вторым входом блока умножения, выход блока сравнения соединен со входом вычислителя критерия настройки, выход первого сумматора соединен со входом первого сглаживающего фильтра, выход источ ника смещения соединен со вторым входом второго -сумматора. На чертеже изображена блочно- нкци- ональная схема системы. Управляющее воздействие подается на вход основного контура 1 и эталонной мо дели 2, выходы которых сравниваются в блоке 3 сравнения, на выходе которого формируется вектор ошибок fi . Вектор В подается на вход блока 4 формирования частных производных критерия настройки по компонентам ошибки. Компоненты выхода подаются на первые входы блоков 5 умножения и суммирования. На вторые входы блоков 5 подаются сигналы с выхо дов блоков 6 вспомогательных операторов, на входы которых подается управлени и . Выходы блоков перемножения и сум мирования связаны с квадраторами 7 фун ций чувствительности критерия настройки по перестраиваемым параметрам, выходы которых суммируются в первом дополнительном сумматоре 8, выход которого через первый сглаживающий фильтр 9 связан с первым входом второго дополнительного сумматора 10, второй вход которого связан с источником 11 смещения. Выход второго сумматора Ю связан со входом знаменателя блока 12 деления. Ошибки в подаются также на вход вычислителя 13 критерия настройки, который через второй сглаживающий фильтр 14 связан с дополнительным усилителем 15, выход которого связан со входом числителя блока 12 деления. Выход блока 12 соединен с первыми входами дополнительного блока 16 умножения, где поотдельности перемножается с выходами блоков 5 - функциями чувствительности критерия настройки по настраиваемым параметрам. Произведения являются скоростями пере- стройки параметров, которые интегрируются Б блоке 17 и полученные отклонения выставляются--в основном контуре. Предлагаемая самонастраивающаяся система работает следующим образом. В соответствии с известными принципами перенастройка параметров в градиентных самонастраивающих системах с Эталонными моделями производится по закону.... v -i -и настраиваемый параметр; где -критерий настройки, четная 4унк1шя или функционал ошибки настройки -% ; - п -мерные выходы соответственно эталонной модели и основного контура управления. Требование апериодическога переходного процесса по критерию настройки с определенным быстродействием выражается (--Уб), ,(2) Предположим, что отклонения параметров основного контура от номинальных и квазистационарности при работе контуров настройки незначительны s(|).i,ii(,. i) 1 (j) 1,2,...,п. (4) Индекс (о) означает, что частные производные б.ерутся для номинального режима, Д di - отклонения перестраиваемых параметров от номинальных, Д |Ъ д , j 1..., - отклонения неконтролируемых Heперестраиваемых параметров. (S4/ i kii з lk.1 .li ((} , Из (4) следует, что Q(e) определяется процессами настройки параметров (основная 5 составляющая, первое слагаемое ках), на которые накладываются ющие от переменности входного воздействия (третье и четвертое слагаемые). . Предположим, что л fbj постоянны, тогд вторыми слагаемыми в течение процессов настройки можно пренебречь. Для обеспечения независимости основной составляющей асе) от и условие (2) представля -Г) (аг,, 5 ЭецЧл в предлагаемой самонастраивающейся системе параметры Л в (1) выбираются одинаковыми i , , а Г ЗТ (k) «К. Предположим, что номинальные неизменны за время настройки, из (5) и (6) (gд.li) При выборе -л. M-JLTirl -)имеет место выполнение (5), а также (Sit:-( так как Эе, ()(,g)-) , ввиду независимости X&iv отс1 , ЗФ /Эс1 вспомогательный оператор, частная произ водная .оператору основного контура (ОК) по К -му выходу. При практической реализации Л сглаживают, усредняют и ограничивают ) да ; сТугде C 0oris-t 0 - сигнал смещения для ограничения скорости настройки, огра ничивающий X при существенном сниже НИИ V ; . V - переменный параметр, результат фильтрации инерционным фильтром v-()4 4ii в результате воздействия управления и на выходах ОК и эталонной модели возникают сигналы соответственно X и на выходе блока 3 формируется вектор ощибки В Блок 4 имеет на выходе век- (10 в скоб- тор частных пpoизвoднь x критерия настсоставля- ройки по .компонентам вектора Q 8774716 f сЭСЭ п , которые подаются на первые входы блоков 5 перемножения и суммирования. На вторые входы блоков 5 подаются выходные сигналы блоков 6 - вспомогательных операторов, причем на выходе -i -го бпока вспомогатетпьных операторов обра- зуется вектор функции чувствительности ( fer . Блок 1 из группь блоков 5 осу осуществляет выполнение операции V. ii ) , ; Выходы блоков 5 перемножения и суммирования связаны с квадраторами 7, выходы которых суммируются в первом дополнительном сумматоре 8, на выходе которого образуется сигнал, равный r-.fia ЭФ1, ча , f,U., ad,;- который подается на вход первого сглаживающего фильтра 9 ( W ), сигнал выхода которого V суммируется во втором дополнительном сумматоре 10 с сигналом источника 11 смещения. Сумма C+V подается на вход знаменателя блока 12 деления. Ощибка е с выхода блока 3 подаете ся также на вход вычислителя 13 критерия настройки, который через второй сглаживающий фильтр 14 связан с дополнитепь-, ным усилителем 15 с коэффициентом усиления М , равным модулю показателя экспоненты желаемого переходного процесса по критерию настройки. Выход усилителя 15 связан со входом числителя блока 12 деления, выход которого соответствует переменному параметру Я (10). В дополнительном блоке 16 умножения производится перемножение выходов блоков 5 на % и образуется вектор с компонентами .(aGl,/«9cLjj), ,... ,г. .... Полученные скорости перестройки параметров ОК интеррируются в блоке 17 и отклонения выставляются в основном контуре правления. Предлагаемое изобретение позволяет добиться схемно-конструктивного упрощения самонастраивающейся системы автомартического управления с эталонной моделью, в частности, избежать пропорционального 8 у1вепичения числа блоков деления числу, перестраиваемых параметров, а также дор биться повышения эффективности работы системы - малого влияния амплитуды и . формы управляющего воздействия на процессы адаптации и придания переходному процессу по критерию настройки характера, близкого к заданному эксп6ненциаль ному. Формула изобретения Самонастраивающаяся система управления с эталонной моделью, содержащая последовательно соединенные основной контур управления, блок сравнения, блок формирования частных производных, выход которого соединен с первыми входами блоков умножения и суммирования, своими выходами подключенных к соответству юшим первым входам блока умножения, а через соответствующие квадраторы - с соответствующими входами первого сум- мдтора, выход блока умножения соединен; -через интегратор с первым входом основ ного контура управления, второй вход которого соединен через эталонную модельсо вторым входом блока сравнения, а через блоки вспомогательного оператора со вторыми входами соответствующих бло 1 ков умножения и суммирования, отличающаяся тем, что, с целью повышения устойчивости системы, она содержит источник смещения и последовательно соединенные первый сглаживающий фильтр, второй сумматор и блок деления, а также пбследовательно соединенные вычислитель критерия настройки, второй сглаживающий фильтр и усилитель, выход которого соединен со вторым входом блока деления, связанным своим выходом со вторым входом блока умножения, выход блока сравнения соединен со входом вычислителя критерия настройки, выход первого сумматора соединен со входом первого сглаживающего фильтра, выход источника смещения соединен со вторым .входом второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Солодовников В. В., Шрамко Л. С. Расчет и проектирование аналитических самонастраивающихся систем с эталонными моделями. М., Машиностроение, 1972, с. 270. 2.Петров А. И. Об одной задаче определения оптимального алгоритма самонастройки. Известия АН СССР. Техническая кибернетика, 1971, № 1, с. 206-217, схема с. 216 (прототип).
