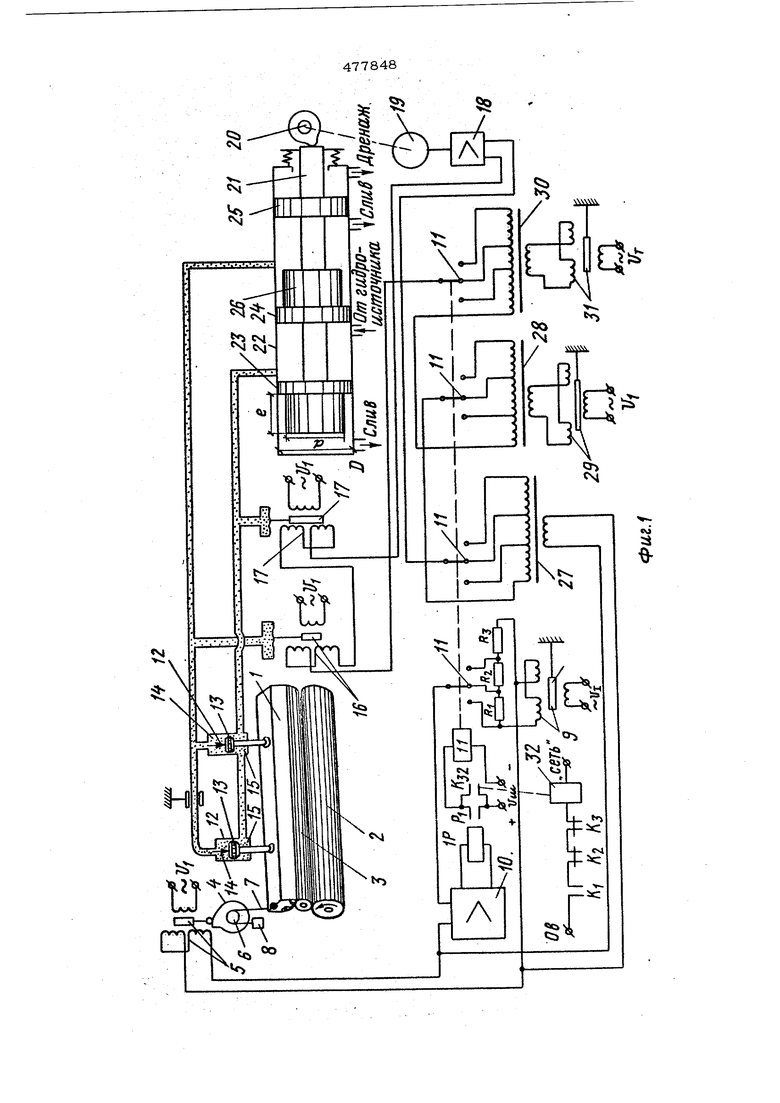
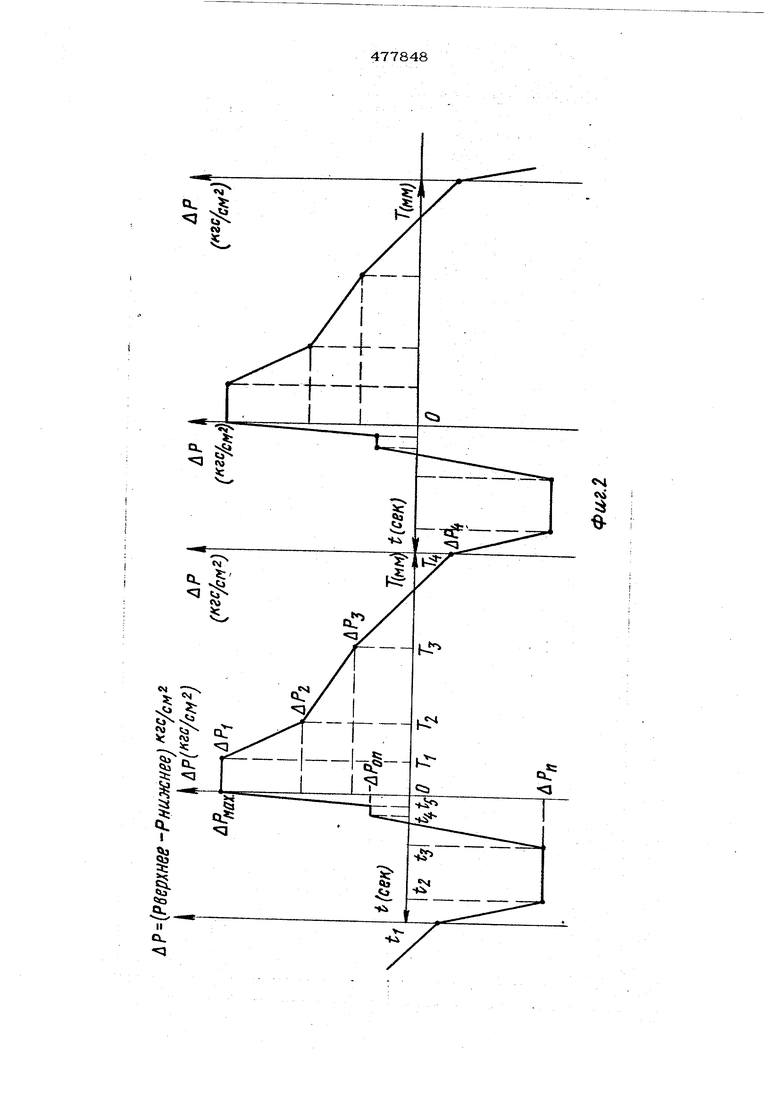
оеа -13 KOTopbix снабжены цилиндрически :-,r..i Г10цставка1чгй с диаметром, меньшим диа v-iafC-a aopiiJKeft. а золотника кинемЗ сзязан с валом электродвигателя. па шиг, J. изображена прнншяшальная ,-;a пр гдлагаемой машины; на фиг. 2 Ейлаюгра гма нзмененин разности давлений Б верхних и Ш1ДСШ5Х ЛОЛОСТЯХ ГИДРОДИЛИВД ров Шшины в процессе формования трубы Диоклййпь дда ийкла), Машина для изготовления асбестоцемен иыт. труб содархшт зюшаж 1 давления, 040v) вдп 2 л форматную скалку 3, дат чик толиляы стенкл фор гуемой 3Mop;fiBb :j устройством, гидросистему с f,:-.ieiJViTCJiK.iia давления з гидросистеме и редутстором дпвле1тия с уиравяяемым приво дом, программные устройства изменения давления н схаму управления. Датчлгк толщиньт стенки трубы представ j/яет собой измерительную систему, состо профильного кулачка 4 а диффе- рендкального трансфорк атора 5. Плунжер двффер9и.ииального трансформатора 5- постоянно контактирует с пpoфильны г кулачком 4, {а оск проф;шьного кулачка 4 за«. сре тпека звездочка 6 которая депью 7 CB нанй с зхкпажем 1 давления. На втором icGijJi;; цэпт 7 Зкренлен груз 8, вгорнчкое устройство соединено с диф-ера7ящ--:-::ч1я;.; тралсфорыатором 5 и ,;к-г ;;м .;;чгП:ига опорного напряження, ibi),:;: гпигяа:. л видэ дифЬерендиального -г.-а:сф: т ма-ч:;;« 9 Н ус«лите/-я Ю с реяей ;:;. «члхадО,-: (1F) Вторичная обмотка ьлффзг;ел-1:па;;:::, трансформатора 9 через .-vv:fc тапрсжегшя Г,. R -R, выведена X .-с о В JTЛ;,;:, пгагового искателя 11, Напря- i(9;me ят таш1я игагового искателя ll(C) icfjif ycs яа Э1о катуш1{у черезконтакты . рале IF- усилителя Ю, ;ЧП;ОО;ТСТ8Ма МВШИНЫ СОСТОИТ ИЗ ГИД- патз.1-г-;цроз 12, Шток каждого гидроци .-г 12 созданйн С экипажем давления I, } -оглгусл - аатсреялены. Поршень 13 ).i;: ;rai-- v-r :-бьем гчдродмлиддра 12 наaAibViiinj-ffijyir, (нерхшою) и подпоршневую litiiKifiniij) )олост5 14 и 15, Полости 14 :5 а ГОГ-: Ч ГО vOJ(OCTw 15 СОвДИНвНЫ МвЗйДУ cjo.-H. мг;меритег н давления в верхних и HWJKTjTTK nojTOcTHX 14 в 15 гидроцилиндров 12 вь«тслв9 1ы в виде ьшнометров с электр- чес1:пгмн выходами, например, выходным (зкеюзем . ; дифференциальных lтaнcф;;p aтopDB 16 Н 17. Вторичиые об; а:г;-; : аиффэренцтзальньзх трансформаторов и встречно и подсоедйняются к одному из входов усилителя 18, выход которого соединен с реверсивным ; электродвигателем 19. Вад двигателя 19 ; кинематически, через кулачок 20, связан : со штоком 21 редуктора давления, подклю-. ченного к верхним 14 и нижним 15 полостз5М гидродилиндров 12 экинажа 1 давления машины. Редуктор давления вьгаолнен в виде цилиндра 22, внутри которого перемещается шток 21, имеющий три поршня 23, 24 и 25, два из которых 23 и 24 jcga&KeHW цилиндрическими нриставками 26 с диаметром (и ), меньшим диаметра 1 поршней (// ). Первое программное устройство для изменения давления в верхних полостях 14 гидродилиндров 12 состоит из трансформаторов 27 и 28 и источника опорного напряжения 29. Первичная обмотка трансформатора 27 соединена со вторичной обмот|кой дифференхщального трансформатора 5. I Вторичные обмотки трансформаторов 27 и 28 вьгаолнены секционированными. Концы каждой из этих обмоток выведены на ла- мели шагового искателя 11. Источник опорного напряжения 29 представляет собой дифференциальный трансформатор, вторичная обмотка которого соединена с первичной обмоткой трансформатора 28. Второе программное устройство состоит из трансформатора 30 и источника 31 опорного напряжения. Вторичная обмотка тран,сформатора 30 выполнена секционированной. Концы каждой секции этих обмоток выведены на ламели шагового искателя 11. Источник 31 опорного напряжения представляет собой дифференциальный трансформатор, вторичная обмотка которого соединена с первичной обмоткой трансформатора ЗО. Схема управления включает контакты К (Стоп главный привод машины), К (Экипаж давления вверх ), К (Эки ;-Опаж давления вниз) и реле 32. Катушки реле К , К , К на фиг, 1 не показаны. 1 ci 3 Контакты реле 32 включены в цепь питания шагового искателя 11 параллельно контактам Р реле IP. К первичнь1м обмоткам дифференциалыных трансформаторов 5, 9, 16, 17, 29 и З подведено переменное напряжение пи- тания 1) 10-12 в. Машина работает следующим образом. Полный цикл формования асбестоцемент ной трубы путем послойного наложения асбёстоцементной пленки на форматную скал ку 3 состоит из { начиная с момента окон чания предшествующей трубы) операшш , подъема экипажа 1 давления формования и следуютдего за ним опускания. При этом .давление в гидроцилиндрах 12 экипажа 1 |давления должно изменяться по определен ной программе. Одна из возможных программ изменением давления в период всего цикла работы машины изображена на фиг. 2, где по оси ординат откладывается разность давлений (ЛЛ кг/см ) в верхних И нижних полостях 14 и 15 гидроцилиндров 12, а по оси : абсцисс вправо от нуля откладывается толщина стенки формуемой трубы (Тмм), влево от нуля откладывается время, за которое происходит подъем и опускание экипажа 1 давления и набор начальной разности давления прессования ( с сек). Программа изменения давления в период всего цик ла работы машины состоит из шести чает i. ...- -- - -Первая - подъем отрицательной разност Т давления др (в промежуток времени (tit в гидроцилиндрах 12, Вторая-поддержание постоянной Отрицательной разности (А Ptl в течение времени „ - f , подъема эки eiО пажа 1 давлен41я. Третья-создание нулевой или .положительной разности давлений (Роп ) в гидроцилйндрах 12 за время о с д Четвертая-поддержание этой нулевой или положительной разности Apcfi в гидроцилиндрах 12 в течение времени t - I опускания экипажа давлекия 1. Пятая-соадание начальной разности ). Шестая давления прессования изменение разности давления прессования в гидроцилиндрах 12 экипажа 1 в зависимости от толщины стенки формуемой трубы Цикл формоваш трубы начинается в момент времени по окончании формования предшествующей трубы по команде Стоп главный привод машины . Контакты К 1 замыкаются, срабатывает реле 32 и замыкает своими контактами К цепь питания шагового искателя 111 По коман;Де Ход экипажа давления вверх , которая j следует сразу же за командой Стоп глав;ный привод машины , контакты К размыкаются. Реле 32 обесточивается. Контакты К размыкают цепь питания шагового искателя 11 и подвижные ламели шагового искателя переходят с одной позиции на другую. Разность между напряжением, соответ- ствуюшим разности давлений Др{см. фиг.2), снимаемым со вторичных обмоток трансформаторов 27, 28, 2О (первое и второе программные устройства) через ламели шагового искателя 11, и напряжением, снимаемым с дифференциальных трансфор;маторов 16 и 17 (измерители давления IB верхних 14 и нижних 15 полостях гидроцилиндров 12), подается на вход усилите(ля 18. Усилитель 18 управляет вращением вала электродвигателя 19 в ту или ;иную сторону. Вращение вала электродвига теля 19 пфедается на шток 21 редуктора iдавления через кулачок 20, постбянно .контактирующий со штоком 21. Шток 21, i перемещаясь в гидроцилиндре 22, соеди|няет нижние полости 15 гидроцилиндров j 12 с источником гидропитания (через (ПОЛОСТЬ между поршнями 23 и 24), а I верхние полости 14 со сливом (через по|лость между поршнями 24 и 25). В полостях 15 гидроцилиндров 12 поднимается давление Д Й) (см. фиг. 2),рав-: ное разности давлений в верхних 14 и нижних 15 полостях за промежуток времени I -f (см. фиг. 2) и поддерживается в течение всего времени подъема экипажа давления см,фиг,2).При л , этом напряжение на входе усилителя 18 ; непрерывно приводится к нулю. Если раз- ;ность давлений A)P/7( см. фиг, 2) в гидро цилиндрах 12 будет отличаться от заданного программой значения разности давлеI НИИ (см. фиг. 2), например, превы, шать его, на входе усилителя. 1& появится разностный сигнал определенной амплиi туды и фазы. На электродвигатель 19 бу. дет подаваться с выхода усилителя 18 I управляющее напряжение, которое застав- ляет вал электродвигателя 19 и соединен- J ный с ним кулачок 2О в требуемом на-, I правлении. Шток 21 редуктора давления, кинематически связанный с кулачком 2О, будет перекрывать поршнем 23 гидромагистраль, соединяющую нижние полости 15 гидроцилицдров 12 с источником гидропитания и поршнем 24 гидромагистраль, соединяющую верхние полости 14 гидроцилиндров 12 со сливом, и, следовательно) разность давлений А 3(см. фиг.2) в гидроцилиндрах 12 уменьшаться (по амплитуде). Если же разность давле1ШЙ в гидрошглиндрах 12 экипажа 1 дав: пения машины будет меньше заданного
программой значешшЛ/ / (см, фиг. 2).
действия будут происходить в обратном , направлешш. Таким образом происходит
подтаем экипа 1са 1 давления машины.
В момент J (см фиг,, 2) подъем экипалса давления заканчивается и следует третья часть никла работы машины. Контакт К возвращается в начальное 7 , : состояние (на шиг, 1 показано начальное ,, . „ состозлше контактов К /. Реле 32 сраба2тывает -и евоими контактами К замыка ет иепь шеташш шагового искателя 11. Сразу же по окончании команды Ход эки па-лш давлешя ВБерх подается команда Ход экипажа давлеивя вниа. По этой ко манде контакт К размыкается и реле 32 возвращается в начапьноё состояниеГ Контакты К и реле 32 размьпсают цепь питаю-2я шагового искателя 11 и подвижны ламели шагового искателя 11 , Г переходят ; на новую позицию, ; Рааность ме}кду напряжением, соответi ствую1Ш{м разности давлений Д Р (см. :/ оп фиг, 2), снимаемым со вторичных обмо-. ток трансформаторов 27, 28, 30 (первое в: второе программные устройства) через шагового искателя 11, и напряжеШгеМ; снимаемым с дифс()еренциальных транс форматоров 16 и 17 (измерители давления Б Bepjams 14 и нижних 15 полостях гидро цилиндров 12), подается на вход усилите ля 18 Ус 1лктель 18 управляет вращением вала электродвигателя 19, которое через кулачок 20 передается на шток 21 редуктора давления. Шток 21, перемещаясь в гидродилиядре 22, соединяет верхние полости 14 гидроцилиндров 12 с источником гидропитания (через полость между поршнями 23 и 24), а нижние полости 15 со сливом (через полость между поршнем 23 и корпусом гидроцилиндра . 22). В верхшгх полостях 14 гидроцилиндров 12, создается давление Л/3 (см, фиг. 2), равное разности давлештй в верхних 14 и нижних 15 полостях за промежуток времетш Г ... t . (см. фиг 2) и поддерживается в течегше времени- опускания экипа. жаяавлеш1я ( J .,- фиг. 2),-При этом напряжение на входе усилителя 18 непрерывно приводится к нулю. Если разность давлений AD (см. фиг. 2) в гид8
: роциливдрах 12 будет отличаться от заданного программой значения разности давлений &р (см. фиг. 2), например, превышать его, на входе усилителя 18 появит5, ся разностнь й сигнал, определенной ампли туды и фазы. На электродвигатель 19 бу |дет подаваться с выхода усилителя 18 упjравняющее напряжение, которое заставит Г j вращаться вал электродвигателя 19 и со- I Единенный с НЕМ кулачок 20 в требуемом | , направлении. Шток 21 редуктора давления, ---„„.-. ; кинематически связанный с кулачком 2 О, /„ . будет перекрывать (поршнем 24) гидрома. |гистраль, соединяющую верхние полости |14 гидроцилиндров 12 с источником гидпропитания , и {поршнем 23) гидромагист| „. соединяющую нижние полости 15 гидродилнндров 12 со сливом, к, следова |тельно, разность давлений Д О (см, I/ оп 1ФИГ, 2) в гидроцилиндрах 12 будет уменьшаться (по амплитуде). Если же разность давлений в гидроцилиндрах 12 экипажа 1 (давления машины будет меньше заданного программой значения Л 10 . (см. фиг. 2) iдействия будут происходить в обратном направлении. Таким образом, происходит опускание экипажа 1 давления машины. Скорость подъема и опускания экштаI жа 1 давления (длительность промежут- КОВ g tg см. фиг. 2) будет зависеть от величины и знака за разности давлений АР. см. фиг. 2). формования асбестоцементной трубы начинается в момент времени f (см. фиг. 2) по окончании :/ I команды Ход экипажа давления вниз. Контак К замыкается и реле 32 срабаi3- . тывает. Цепь питания i шагового искателя 11 оказывается замкнутой (через замкнутые контакты К реле 32). Следом :О f за командой на прекращение опускания Iэкипажа давлени51 подается команда Пуск I главного привода машины. Контакт К j размыкается. Реле 32 возвращается в наЗчальное состояние. Цепь питания шагового искателя 11 .jразрывается и подвижные I; ламели шагового искателя 11 переходят на новую позицию. I Разность между напряжением, соответ|ствуюцдам разности давлений Д р (см. , / нач ;ф,. 2), снимаемым со Бторнч,1ых обмо: ТОК трансфорт 1аторов 27, 28 и 30 (пер- вое и второе программные устройства) . через ламели шагрвого искателя 11, и напряжением, снимаемым с дифференийапь. ных трансформаторов 16 и 17, подается на вход усилителя 18, Усилитель 18 упj равляет вращением вала электродвигателя 19 в ту или иную сторону, Вратаение вала электродвигателя 19 через кулачок 20 пе{редаетоя на шток 21 редуктора давления, который воздействует на давленке в гидроцилиндрах 12 экипажа 1 давления до тех пор, пока в верхних 14 и нижних 15 полостях гвдрошшигщров 12 не установится заданное программой значение разности давлений Дрноч (см. на фиг. 2), равное начальной разности давления прессования, Таким ббразом, обеспечивается на§ор Iначальной разности давлений прессования |АРнач.: (см. фиг. 2). Затем давление прессования должно изменяться по заданной программе в зависимости от толщины стенки формуемой трубы I (шестая часть никла формования асбестоцементной трубы). С началом процесса послойного наложения асбестоцементной плен ; ки на форматную скалку --З начинает нзме- |няться положение по высоте экипажа 1 дав1ления, которое через цепь 7, звездочку 6, профильный кулачок 4 и дифференциальный 1 трансформатор 5 преобразовывается в наi пряжение, соответствующее толщине стен|ки формуемой трубы. Это напряжение поСдается на трансформатор 27, который про; изводит его умножение на коэффициент (Трансформации. Умноженное напряжение, электрически связанное с постоянным наIпряжением (или его частью), величина кото Iрого определяется коэффициентом трансформации трансформатора 28, В результате этих преобразований напряжение, соответствующее толщине стенки трубы, оказывается равным напряжению, соответствующему разности давлений в гидроцилиндрах 12 экипажа 1 давления, при значениях толi щины стенки трубы, и разности давлений прессования, определенных заданной программой изменения указанных величин. Разность между преобразованным напряжением соответствующим толщине стенки формуе; ой асбестоцементной трубы, и разностным j напряжением дифференциальных трансформат ; ров 16 и 17 (измерители давления в верхних 14 и нижних Г5 полостях гидроциливдров 12) подается на вход усилителя 18. Усилитель 18 управляет вращением ва; ла электродвигателя 19 в ту или иную I сторону. Вращение вала эле1 тродвигателя 19 передается на шток 21 редуктора ления(через кулачок 2О). Шток 21, пере-. ; мещаясБ в гидроцилйндре 22, меняет со противление на участках верхние поло1сти 14 гидроцилиндров 12-слив, нижние полости 15 гидроцилиндров 12-источник или на участках верхние полости 14 источник гидропнтания, нижние полости 15-слив. Сопротивление на указанных выше участках формируется за счет дли- зазора Jj-e ны t, зазора J - Q, цилиндрических I приставок у поршней 23 и 24. Изменяя ; сопротивления на упомянут±.1х участках, i шток 21 редуктора давления воздействует |,на разность давлений в гидроцилиндрах 12 j .экипажа 1 даления машины до тех пор, по- :1са йзмененному положению экипажа давI ления по высоте не будет .; соответствовать разность давлений в гидройилиндрах 12, заданная программой (коэффициент трансформации, число витков вторичной обмотки трансформаторов 27, 28, ЗО и величина напряжения, подаваемая трансформатором 29 и 31). Таким образом, осуществляются линейные программы изменения разности давлений / прессования в верхних 14 и нижних 15 полостях гидроцилиндров 12 в зависимосги от толщины стенки формуемой трубы. Нелинейные программы, апроксимируемые I линейными отрезками (Ap|f,(j(/ ЛД, , Л/Эз-ДО, йрг&Ысм. фиг. 2), осуществляются тем, что при определенных значениях тол- шины стенки трубы (Т , Т , Т ,см. фиг.2) 123 изменяются параметры электрического преобразования. Это достигается автоматическим переключением вторичных обмоток трансформаторов 27, 28, ЗО при-.: помощи шагового искателя 11, управляемого усилителем 10 с релейным выходом IP. При этом на вход усилителя 10 подается разность между напряжением дифферешшального трансформатора 5 и опоррным напряжением ;i;,дифференциального : трансформатора 9. При значении этой раз|Ности, близкой к нулю, реле IP усилите ля -iO срабатывает и шаговый искатель 11 ,„зменяет параметры первого и второго {программных устройств (переключение секционированных обмоток трансформаторов 27, 28, 3Q. Кроме того, шаговый искатель 11 после каждого срабатьшания изменяет величину опорного напряже,ния вторичного устройства датчика толщины (делитель Ц -R -1 ),
о
11 Тем самым, вторичное устройство пе I реводится в исходное состояние для следу , ющего срабатывания. Таким образом, осу ществляется переход от одного апроксими- рующего линейного участка программы к другому и т. п. При достижении заданного значения (см. фиг. 2) срабатывает ретолщины т ле IP. Шаговый искатель 11 -производит очередное переключение и выдается команда на остановку машины Стоп главный привод машины (Контакт ..К, замыкается). На этом цикл формования трубы на машине заканчивается. i Таким образом, реализуется работа машИны в полном автоматическом цикле по прессовой части, что обеспечивает повышение производительности ыашины и улуч шает условия труда машинистов. Предмет изобретения 1. Машина для изготовления асбестоцементных труб, содержащая экипаж давления, опорный вал, форматную скалку, датчик толщины стенки формуемой трубы со вторичным устройством, выполненным с шаговым искателем, гидросистему, содержащую гидроцилиндры, штоки которых связаны с экипажем давления, измеритель давления в Bepxifflx полобтях гидродилиндров, соединенный с редуктором давления, кинематически связанным с валом электродвигателя,и программные устройства изме12нения-давления в гидросистеме, первое из которых выполнено в виде двух трансформаторов, первичные обмотки которых соединены с выходом датчика толщины и с выходом источника опорного напряжения, а вторичные обмотки выполнены секционированными, соединены между собой и подключены к одному из входов усилителя электродвигателя, отличающаяся тем, что, с целью обеспечения работы машины в автоматическом режиме, машина снабжена дополнительным измерителем давления в нижних полостях цилиндров, электрический выход которого последовательно соединен с электрическим выходом измерителя давления в верхних полостях гидроцилиндров, а второе программное устройство конструктивно выполнено аналогично первому и со вторичной обмоткой, подклю-о ченной через ламели шагового искателя вторичного устройства датчика толщины к выходу измерителя давления в верхних; .полостях гидроцилиндров, причем редуктор . давления дополнительно подключен к ниж- ним полостям гидроцилиндров. 2. Машина по п. 1, отличающаяся тем, что редуктор давления выполнен в виде золотника, содержащего три поршня, закрепленных на общем штоке, два из j которых снабжены дияиндрическими приставками с диаметром, меньшим диаметра поршней, причем шток золотника кине-,.. матически связан с валом электродвигате : ; ля....„ :