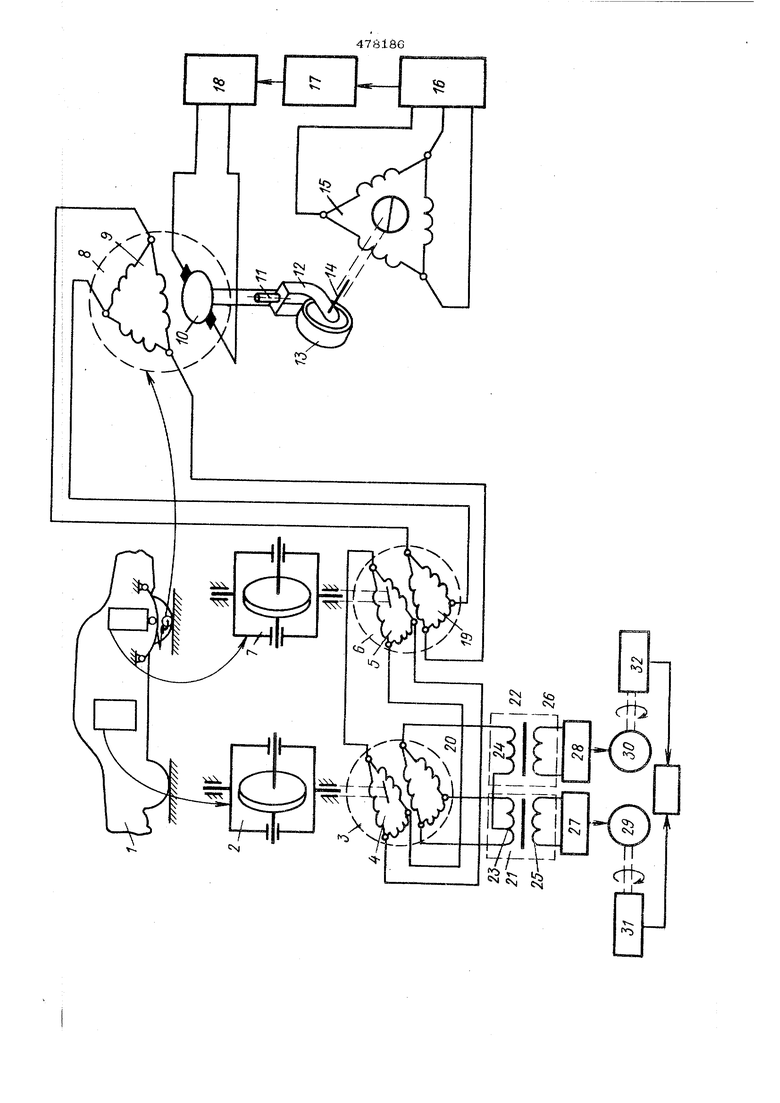
ствляется от оси 11, иа которой укрегахв но вильчатое дышло 12. В дышле 12 уст&ноЕлено колесо 13, контактЕфующее с дорогой, а с осью 14 колеса 13 связан ротор датчшса скорости 15 {тахогенератора переменного тока). Трехфазная обмотка тахогенератора 15 присоединена к вьшрямителю 16. Выход от вьщрямителя связан с фильтром 17,а фильт в рвою очередь подключен к входу модулят ра 18. Статорная обмотка 9 сельсина едднена с статорной обмоткой 19 сельсина 6.; Роторная обмотка 5 сельсина 6 соединена с роторной обмоткой 4 сельсина 3. Ст аторная трехфазная обмотка 20 сельсина 3 соединена с трансформаторами 21 и 22. Два конца трехфазной обмотки 2 соединены с началом и концом первичной обмотки 23 трансформатора 21. Оставшийся конец трехфазной обмотки 2О присоединен к н&чалу первичной обмотки 24 трансформатора 22. Конец обмотки 24 присоединен к средней точке обмотки 23. Вторичные обмотки 25 и 26 трансформаторов 21 и 22 связаны с входами усшштелей 27 и 28. К выходу 3Titx усилителей подключены интегрирующие двигатели 29 и 30. Выходнь1е валы интегрирующих дви-гателей механически связаны с движками потенциометров 31 и 32. От потенциомет ров 31 и 32 выходные сигналы подаются на индикаторный прибор 33,в качестве ког торого может использоваться двухкоорданат шш самописец щлейфовьш щш двухлу- чевои осциллограф. Работает регистратор траектории движения автомобиля следующим образом. При движении автомобиля 1 по криволинейным маршрутам гироскопический датчик курса 2 сохраняет псхложе1ше рамки гироскопа, уотановлениое в начале движения. Таким образом, относительно осей неподвижной системы координат, связанной с зекшей, pajvt ка гироскопа 2 также неподвижна, посколь ку с рамкой связан ротор 4 сельсина 3, то и ротор относительно осей нeпoдвILЖHoй снс1ч;мы координат неподвижен. Изменение же угпоього положения кузова автомобиля Оглоснгельяо осей не1юдви аюй системы координат приводит к относительном повороту рогора 4 и статора 20, поскольку CTciTop связан с кузовом автомобиля. Колесо 13 контактирует с дорохой и при автомобшит вращаетх я. Связанный с осью 14 5шорь датчика скорости (тахо1енерааора) 15 вращается и с тахог-еьератора сш1 мается переменное напряжение, пропорциональное скорости движения автомобиля. При переменной сксрости вра- 60 щения якоря тахогенератора переменными будут не только выходное напряжение, ной ча стота тока. Для того чтобы сигнал тахогенератора можно бьшо ислользоватьврегистрагторе траектории, он дшжен иметь 1фи перемед ной амплитуде напряжения, зависящей от ско ;ЕОСти,. постоянную частоту. С этой целью сигнал тахогенератора 15 выпрямляется в выпрямителе 16, а затем выходной сигнал постоянного тока от выпрямителя 16 фильтрруется в фильтре 17 и модулирует по амплитуде постояш гю несущую частоту в модуляторе 18. Напряжение с выхода модулятора подается в якорную обмотку 1О сель- . скна - датчика 8 yi-ла увода. При движении автомобиля колесо 13 не только не вращается с осью 14 но и новорачивается с вертикальной осью 11 так, чтобы установиться по направлению вектора скорости движения, при котором сопротивление качению колеса 13 будет минимально, Угол отклонения вектора скорости точки установки колеса 13 от направления, , перпендикул5фного к поперечной оси автомобиля и есть угол увода этой оси. Таким образом, поворот якоря 1О сельсина 8 относительно его статорной обмотки 9 происходит на угол увода ведущей (поперечной) оси, поскольку статор связан с ведущей осью.i Однако сама поперечная ось автомобиля при зависимой ее подвеске к кузову без реактивных рычагов перекрещивается по OTHomojHiK) к. продцдьной оси. Для измерения этого угла перекоса служит гироскопический датчик 7 с сельсинным элементом 6. Этот датчик устанавливается на ведущей оси. При движении автомобиля 1 по кривш1инейным маршрутам гироскопи4ecKHii датчик 7 так ж( как и PHpocKoni-t-. ческий датчик 2 сохраняет положешю рамки гироскопа, установленное в начале движения. Таким образом, рамка гироскопа 7 и ротор 5 его сельсина 6 будут всегда неподБижщл относительно осей неподвижной | системы координат, связанной с зеадюй. Положеш1е рамок гироскопов 7 и 2 так же как и якорей 5 и 4, связанных с ними сельсинов 6 и 3, одинаково. Однако статор 19 сельсина 6, .связанный с ведущей осью, повернется относительно осей неподвижной ciic1емы координат на сумма{ ный угол курса и перекоса ведущей оси, в то время как статор 2О сельсина 3 пове| нется только на угол курса. Как сказано вьаие, статорные обмотки сельсинов 8 и 6 соединены между собой. образом, напряжение возбуждения статорной обмо1ки 19 сельсина 6 зависит от напряжения воз- буждения роторной обмотки 1О сельсина 8 (т. е. от скорости движения) и угла поворота ротора 10 относительно статорной о& мотки 9 (угла увода). Выходное же напряжение от обмотки 5 сельсина 6 - датчика угла перекоса оси зависит от напряжения возбуждения обмот ки 19 и угла поворота ротсфа 5 относитель но статора 19. Это напряжение подается далее в роторную обмотку 4 сельсина 3 датчика курса 2. Теперь напряжение, снимаемое со ст торной обмотки 20 сельсина 3, зависит от возбуждения напряжения возбуждения роторной обмотки 4 и угла поворота ротора 4 относительно статора2О.Т.е. напряжение на выходе статорной обмотки 20. пропорционально скорости движения и относительным углам поворота роторов и статоров сельсинов да1 чиков курса перекоса и увода. Это напряже1ше подается в первичные обмотки 23 и 24 корректирующих тра1юформаторов 21 и 32, соедкне1шых между собой так, как показано на чертеже. При определенном соотношении коэффициентов трансформации обоих трансформаторов (1:1 для траноформатора 21 и 0,866 : 1 для трансформатора 22) со вторичных обмоток 25 и 26 снимаются напряжения, пропорциональгные произведению скорости движения автомобиля па синус и косинус алгебраической суммы углов курса, перекоса оси и увода оси. Эти напряжения усиливаются в усши телях 27 и 28 и nociynaiOT на входы интегрирующих двигателей 29 и 30 перемен ного тока. Выходньш каналы валы телей 29 и 30 имеют механическую связь с потенциометрами 3il и 32, т. е. перемещают движки потенциометров. На выходе потенциометров 31 и 32, механически связанных с выходными валами интегрнрующи двигателей 29 и 30, образуются напряжения, пропа{ циональные составляющим npoj денного пути относительно осей неподвиж- , ной системы координат, связанной с зем- лей. Эти пути и регистрируются в индикаторном 33. редмет изобретения Устройство для регистрации траектории движения наземного транспортного средства, содержащее гироскопический датчик курса и и датчик увода с сельсшшыми чувствитель- : ными элементами, датчик , усилители, интеграторы и индикаторный прибор, отличающееся тем, что, с целью повышения надежности и точности и уменьщения запаздывания в регистрации при движении на кривых резкопеременного радиуса, оно снабжено гироскопическим датчиком перекоса ведущей оси, корректирующими трансформаторами, интегрирующими двигателями, потенциометрами, выпрямителем, фильтром и модулятором, при этом статсфная обмотка сельсина датчика перекоса соединена со статорной обмоткой сельсина датчика увода, присоединенного своей роторной обмоткой к датчику скорости через последовательно соединенные выпрямитель, фильтр и модулятсф, а роторная обмотка датчика перекоса соединена с роторной обмоткой датчика курса, соединенного своей статорной обмоткой с корректирующими трансформаторами, подключенными к входам усилителей привода интегрирующих двигателей, механически связанных с потенциометрами, присоединенными к индикаторному прибору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Устройство для измерения курса движения подземного объекта | 1977 |
|
SU734402A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ПРОФИЛОГРАФ | 1972 |
|
SU425045A1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| Устройство для контроля точности индукционных датчиков магнитного курса | 1983 |
|
SU1210059A1 |