I
Изобретение относится к электроприводам и может применяться в системах развертки изображения, фототелетрафни, видеозаписи и др.
Известны системы фазирования, в которых грубое фазирование в начале рабочего режима осуществляется системой установки начальной фазы, а контроль за положением вала в течение всего рабочего режима и поддерха1вание заданной точности фазирования осуществляется системой точного фазирования 1.
Известно также устройство для фазирования приемника, в котором поворот фазируемого вала с целью устранения рассогласования по фазе осуществляется дополнительным приводом, вьшолненным в виде заводной пружины 2.
Недостаток таких устройств заключается в низкой точности фазирования и в значительных габаритах устройства.
Из известных устройств наиболее близок по технической сущности дискретньш злектропривод, содержащий задатчик частоты, выход которого непофедственно и через делитель частоты, релейный блок и блок коррекции соеданен с , соответствующими входами первого фазовращателя, выход которого соединен с первым входом фазойого дискриминатора, выход которого через последовательно соединенные силовой преобразователь, исполнительный -механизм, датчик скорости, редуктор к датчик частоты развертки соединен со вторым входом релейного блока 3.
Недостаток указанного электропривода - низкое быстродействие канала автоматической подстройки фазы, и, следовательно, низкая динамическая точность электропривода при действии быстропеременных возмущающих моментов на нагрузке.
Цель изобретения - повыщение динамической точности электропривода.
15
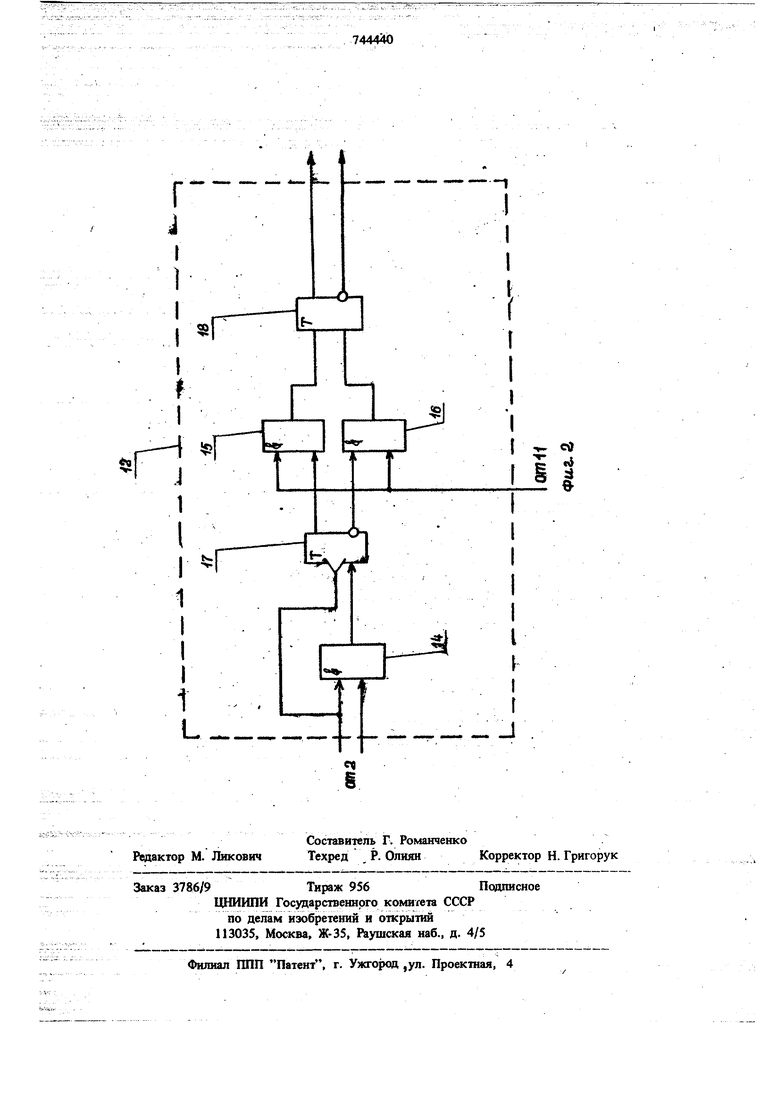
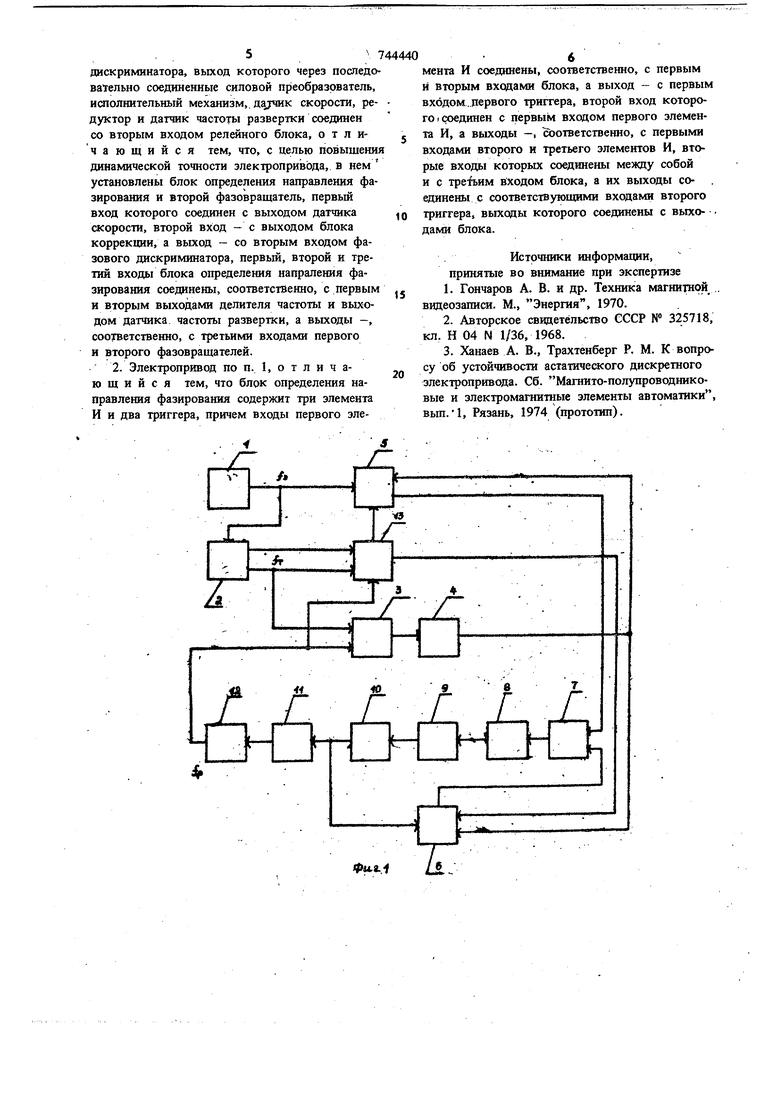
Цель достигается тем, что в приводе установ; лены блок определения направления фазирования и второй фазовращатель, первый вход которого соедииеи с выходом датчика скорости, второй вход - с выходом блока коррекции, а выход - со вторым входом фазового дискриминатора, первый второй и третий входы блока определения направления фазирования соединены, соответственно, с первым и вторым выходами .делителя частоты и выходом датчика ча ХОТЬ развертки, а выходы -..соответственно, с т тьими входами первого и второго фазовра щателей, кроме того блок определения направления фазирования содержит три элемента И и два триггера, причем входы первого элемента И соединены, соответственно, с первым и вторым входами блока, а выход - с первым входом первого триггера, второй вход которого соединен с первым входом первого элемента И, а выходы-, соответственно, с первыми входами второго и третьего элементов И, вуорые входы которых соединены между собой и с третьим входом блока а их выходы соединены с соответствующими входами второго триггера, выходы которого соединены с выходами блока. На фиг. 1 представлена функциональная схе ма дискретного электропривода; на фиг. 2 принципиальная схема блока определения направления фазирования. , Устройство содержит задатчик 1 эталонной частоты, делитель частоты 2, релейный блок 3, блок 4 коррекции, первый и второй фазовращатели 5, 6, фазовый дискриминатор 7, силовой преобразователь 8, исполнительный механизм 9, датчик 10 скорости, редуктор 11, датадк 12 частоты развертки, блок 13 определения направления фазирования, первый, второй и 1ретнй элементы И 14, 15, 16, первый и второй триггеры 17, 18. f - эталонная частота, задающая скорость вращения двигателя; f - тактовая частота, к импульсам которой необх)Ш1Мо привязьгаать импульсы с датчика развертки; f - частота импульсов с датчика развертки. JJficKpeiHMa электропривод работает следующим образом. Задатчик 1 эталонной частоты вырабатывает импульсы эталонной частоты f, которыми задается скорость вращения. Из этой же частоты с помощью дел}{1теля 2 частоты формируются импульсы частоты f, к которым необходимо привязывать по фазе импульсы с датчика 12 развертки. Если рассогласование по фазе между импульсами f и f не превьщгает зоны нечувствительности релейного блока 3, то импул сы fg и импульсы с частотного датчика 10 ско рости проходят соответственно через фазовращатели 5 и 6 без изменений. Управление исполнительным механизмом 9 осуществляет:ся через силовой преобразователь 8 в функции фазового рассогласования этих импульсов, которое выявляется фазовым дискриминатором 7 Если же рассогласование по фазе между импул сами fj и f превыпшет зону йечзшствительнос ти релейного блока 3, то блок определения на правления фазирования опред;еляёт к какому тактовому импульсу ближе импульс f , т.е. отстает он или опережает импульс f.., и cofла сование по фазе производится кратчайшим путем. Если импульс f отстает от импульса f, то блок определения направления фазирования 13 вьщает команду на удаление определенного количества импульсов из последовательности с частотного датчика скорости, которое производится фазовращателем 6, и исполнительный механизм 9 поворачивается, убирая рассогласованне. Если импульс f опережает импульс f., о вьщается команда на удаление импульсов з последовательности f фазовращателем 5. даление одного импульса из той или другой оследовательности изменяет фазу напряжения итания исполнительного механизма в том или ном направлении каждый раз на величину д 1 . 360 электрических градусов. Фаза fs ри этом меняется дискретно, причем точность зменения определяется интервалом дискретности частоты fg. Анализ положения импульсов f относительно импульсов f производится с помощью импульсов f J и импульсов частоты в два раза большей f. С помощью первого элемента И 14 и первого триггера 17 период частоты f делится на два полупериода, информация о которых поступает на элементы И 15 и 16. В зависимоета от того, в какой полупериод появится импульс f , он пройдет через второй элемент И 15 или через третий элемент И 16, устанавливая триггер 18 в то или другое состояние, которое определяет, в какой нмпульсной последовательности удалять импульсы. Быстродействие электропривода определяется частотой f, с которой происходит фазирование, т.е. удаление импульсов, и временем переходного процесса в исполнительном механизме. За счет разбиения периода частоты f на два равных интервала и выбора кратчайшего пути согласования по фазе быстродействие предлагаемого устройства повышается почти в два раза по сравнению с известным. Введение в известный дискретный электропривод блока определения направления фазирования и второго фазовращателя позволило увеличить быстродействие, а следовательно, и динамическую точность электропривода. Формула и .3 обретения 1. Дискретньш электропривод, содержащий задатчик частоты, выход которого непосредственно и через делитель частоты, релейный блок и блок коррекции соединен с соответствуюиими входами первого фазовращателя, выход которого соединен с первым входом фазового 5; 7 дискриминатора, выход которого через последовательно соединенные силовой преобразователь, исполнительный механизм,, скорости, редуктор и датчик частоты развертки соединен со вторым входом релейного блока, о т л ичающийся тем, что, с целью повышения динамической точности электропри1вЬда, в нем установлены блок определения направления фазирования и второй фазовращатель, первый вход которого соединен с выходом датчика скорости, второй вход - с выходом блока коррекции, а выход - со вторым входом фазового дискриминатора, первый, второй и третий входы блока О1феделения напраления фазирования соединены, соответственно, с первым и вторым выходами делителя частоты и выходом датчика, частоты развертки, а выходы -, соответственно, с третьими входами первого и второго фазовращателей. 2. Электропривод по п. 1, о т л и ч аю щ и и с я тем, что блок определения направления фазирования содержит три элемента И и два триггера, причем входы первого злемеита И , соответственно, с первым и вторым входами блока, а выход - с первым входом .первого триггера, второй вход которого (Соединен с первым входом первого элемента И, а выходы , соответственно, с первыми входами второго и третьего элементов И, вторые входы которых соединены между собой и с третьим входом блока, а их выходы соединены с соответствующими входами второго триггера, выходы которого соединены с выхо- дами блока. Источники информации, принятые во внимание при экспертизе 1.Гончаров А. В. и др. Техника магнитной . ввдеозаписи. М., Энергия, 1970. 2.Авторское свидетельство СССР № 325718, кл. Н 04 N 1/36, 1968. 3.Ханаев А. В., Трахтенберг Р. М. К вопросу об устойчивости астатического дискретного электропривода. Сб. Магнито-полупроводниковые и электромагнитные элементы автоматики, вьш.1, Рязань, 1974 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный электропривод с импульсной системой фазирования | 1976 |
|
SU723498A1 |
| Дискретный электропривод | 1975 |
|
SU566237A1 |
| Дискретный электропривод | 1978 |
|
SU911456A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |
| Устройство для программного управления положением вала электродвигателя | 1977 |
|
SU708310A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |