Если функции параметров от времени аналитические, то применяется блок экстраполяции сигнала 9, в основу работы которого положена известная математическая зависимость:
dx(i:)
x(T:+At)x(T;) +
. dt
+iyLM.
где л: (т) - параметр на входе блока I;
Д - запаздывание системы. В случае, когда производные л;(т) не существуют или терпят разрыв, применяют блок экстраполяции 9, в основу работы которого положена известная математическая зависимость:
;с((,т)(т),
где Ф (t, т) - фундаментальная матрица Коши решения дифференциального уравнения для данного параметра;
x(t - выходной сигнал блока л; (т) - выходной сигнал блока 1. В случае, когда фазовые коорди«аты измеряются с запаздыванием и со случайными помехами в системе применяется блок 9 - оптимальной фильтрации (фильтр Калмана) и предсказания, включающий как часть блок 9.
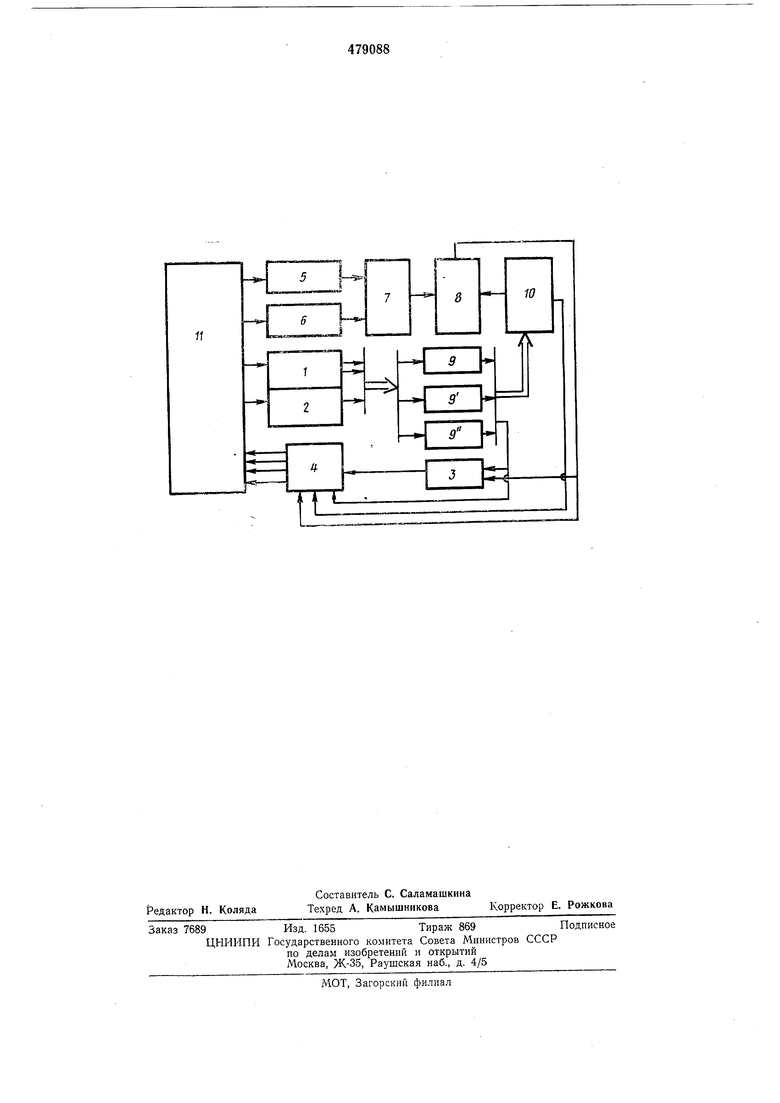
Вычисленные таким образом параметры-- скорость и плотность - подаются в блок 10, где формируется сигнал, пропорциональный скоростному напору, выход которого соединен со входом усилителя (делителя) 8, на выходе которого получают истинный (воздушный) угол атаки. В сумматоре 3 определяется алгебраическая сумма угла атаки а и тангажа
V, который измеряется с помощью датчика тангажа 2. На выходе сумматора 3 получают угол наклона вектора скорости в. Полученные значения угла атаки а, скоростного напора (7. тангажа V, угла наклона вектора скорости 8 подаются в блок формирования сигналов управления 4, где из полученных сигналов формируется сигнал управления, который с помощью силовых приводов отклоняет необходимые органы управления, например руль высоты, элероны - закрылки, тормозные щитки, рукоятку двигателя, с целью компенсации отклонения параметров от заданных значений.
Предмет изобретения
Система автоматического управления и
стабилизации параметров траектории летательного аппарата, содержащая датчики скорости, высоты, тангажа, последовательно соединенные сумматор и блок формирования сигнала управления, выходы которого подсоединены к объекту, который подключен ко входам датчиков, отличающаяся тем, что, с целью повышения точности работы и расширения области применения системы, в нее введены датчики давления и последовательно соединенные сумматор и усилитель, блоки экстраполяции и блок формирования скоростного напора, выходы которого подключены ко второму входу усилителя и входу блока формирования сигнала управления, два других входа которого подключены соответственно к выходам усилителя, блоков экстраполяции и второму входу сумматора, а выходы датчиков давления подсоединены ко входам дополнительно установленного сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2279119C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |