Изобретение предназначено для управления адаптивными промышленными пневмогидравлическими роботами, например, по патентам RU №2208513 С2 - консольного исполнения и №2224637 C1 - портального исполнения, и может использоваться для управления адаптивными роботами как отдельными единицами технологического оборудования в серийном, мелкосерийном и единичном производстве, так и в качестве локальной системы управления в роботизированном производстве в качестве ГРПМ (гибкого роботизированного промышленного модуля), через пневмоэлектрические датчики связанной с системой управления более высокого уровня.
Известны системы управления промышленными роботами с программным управлением при использовании достижений электроники, описанные, например, в работе «Управляющие системы промышленных роботов (автоматические манипуляторы и робототехнические системы)». Москва, Машиностроение, 1994 г., 288 стр., а также глава 3 в альбоме «Промышленные роботы в машиностроении» под редакцией Ю.М.Соломенцева. Москва, Машиностроение, 1987 г., 140 л., содержащие жесткопрограммную, энергетическую часть, систему запоминания и воспроизведения программ, имеющую синусно-косинусные, путевые и иные датчики положения рабочего органа в пространстве робота.
Недостатком таких систем является, во-первых, их дороговизна и, во-вторых, недолговечность из-за старения печатных плат, магнитных записывающих и считывающих головок, гарантийный срок службы которых 6 лет. Применение жесткопрограммного управления промышленными роботами требует дорогостоящей модернизации производства, чтобы повысить точность базирования частей - изделия в поточных линиях по всем технологическим переделам, без чего роботы работают «невпопад».
Системы программного управления требуют инженерного обслуживания, что увеличивает стоимость их использования. В особый период, когда применяется ракетно-бомбовое оружие, специально предназначенное для выведения из строя электроники, блоки управления на их основе полностью выходят из строя.
Предлагаемая пневмогидравлическая система управления адаптивными пневмогидравлическими роботами не имеет этих недостатков.
Техническим результатом использования пневмо- и гидроавтоматики без посредничества электроуправления является повышение надежности и долговечности адаптивных роботов по сравнению с роботами, имеющими электронные системы программного управления.
Технический результат достигается за счет того, что пневмогидравлическая система управления адаптивным пневмогидравлическим роботом включает следящую и стабилизирующую систему скорости хода технологического инструмента рабочего органа, блок логической пневмоавтоматики, блок пневмогидравлической логики и энергетический блок, при этом следящая и стабилизирующая система скорости хода технологического инструмента рабочего органа выполнена в виде системы угловых пневмомуфт и фазовых синусно-косинусных гидрорезольверов на четырех приводных осях гироскопа, включающих главную гироскопическую ось «чистого вращениям, ось нутаций, ось прецессий и ось манипулирования нормалью технологического инструмента к касательной волнового изгиба траектории слежения, а также в виде двух блоков главных и вспомогательных щупов и пневмодатчиков с двух сторон по ходу слежения технологического инструмента, снабженного приводом рабочей подачи и дополнительного отвода от изделия, блок логической пневмоавтоматики выполнен в виде трех пневмоблоков первого уровня управления, включающих первый пневмоблок контурного слежения (А1), второй глобулярного слежения (А2) и третий жесткопрограммного пневмоуправления (A3), блок пневмогидравлической логики выполнен в виде трех пневмогидроблоков первого уровня управления, включающих логический пневмогидроблок управления линейными гидроприводами (Г1), пневмогидроблок управления поворотными гидроприводами гироскопа (Г2) и пневмогидроблок двухтактного импульсного пневмогидравлического насоса в замкнутой системе высокого гидродавления (ИН), а энергетический блок включает блок трехфазного электропитания технологического инструмента, блок тиристорного контактора, блок таймеров, блок подготовки с фильтрацией и влагоотделением сжатого воздуха, газов и подачи охлаждающего компонента, при этом блок логической пневмоавтоматики связан с блоком пневмогидравлической логики и энергетическим блоком, который соединен с технологическим инструментом.
Следящая и стабилизирующая система скорости хода технологического инструмента рабочего органа содержит четырехлинейные и шестилинейную угловые пневмомуфты, выполненные в виде золотника с кольцевой канавкой, разделенной двумя перегородками, причем одна полукольцевая канавка соединена с линией питания сжатым воздухом, просверленной вдоль оси золотника, а вторая - выведена в атмосферу, при этом третья и четвертая линии четырехлинейной пневмомуфты образованы входом и выходом сквозного отверстия в корпусе золотника, у шестилинейной пневмомуфты кольцевая канавка золотника разделена двумя перегородками под прямым углом к центру кольцевой канавки, короткая часть которой соединена с линией питания сжатым воздухом, а длинная - с линией, выведенной в атмосферу, в ее корпусе выполнены два взаимно перпендикулярных сквозных отверстия, которые попарно соединены с входами двух пневмоклапанов ИЛИ, при этом на главной гироскопической оси «чистого вращения» установлены две четырехлинейные пневмомуфты (Мх)19 и [Mz(y)]20, перегородки канавок золотников которых взаимно перпендикулярны, а отверстия корпусов золотников - параллельны, а на остальных гироскопических осях - по одной (Мωк)18, (Мα)22 и (Мβ)23, с перегородками канавок золотников, ориентированными в начальном положении по осям декартова пространства, причем вертикальной его плоскостью, перпендикулярной фронтальной плоскости, короткая канавка золотника шестилинейной пневмомуфты (Мз)21, задающей меридиональные или широтные направления слежения, симметрично разделена.
В блоке логической пневмоавтоматики один пневмоблок А1 первого уровня управления снабжен двумя пневмоблоками второго уровня управления - пневмоблоком (Б1) контурных рокировок поперечных подач на продольную следящую, формирования знака (±) пневмосигналов контурных поворотов главной оси «чистого вращения» гироскопа и связи с энергетическим блоком включением таймеров и пневмоблоком (Б2) формирования пневмосигналов контурного управления знаком (±) хода линейных гидроприводов, пневмоблок А2 первого уровня управления снабжен также двумя пневмоблоками второго уровня управления - пневмоблоком (Б3) глобулярного манипулирования нормалью технологического инструмента и быстрого реагирования на геометрические возмущения и пневмоблоком (Б4) формирования пневмосигналов знака (±) догоняющего поступательного «скольжения» главной гироскопической оси (11) «чистого вращения» для минимизации рассогласования ее параллельности нормали технологического инструмента прецессиями в широтном и нутациями в меридиональном направлении и подключения к доминантности одного из двух взаимно перпендикулярных линейных гидроприводов третьего - гидропривода-корректора - пространственного склонения хода рабочего органа, а третий пневмоблок A3 первого уровня управления снабжен тремя пневмоблоками второго уровня управления - пневмоблоком (Б5) путевых пневмоклапанов контроля ходов линейных и поворотных гидроприводов, счетным пневмоблоком (СБ) и пневмопультом (ПУ) ручного наладочного и автоматического управления приводами робота, в том числе при сервисном обслуживании технологического инструмента, и рабочим пультом РП управления пневмоцилиндром поперечной подачи робота консольного исполнения в предварительное рабочее положение.
В блоке пневмогидравлической логики логический пневмогидроблок (Г1) первого уровня управления снабжен двумя пневмогидроблоками второго уровня управления - стартстопным пневмогидроблоком (Б6) перемены знака (±) направления хода линейных гидроприводов и двухскоростным, двухфронтальным пневмогидроблоком (Б7) автоматического регулирования соотношения величин и градиентов доминантного, дополнительного и корректирующего векторов в прямоугольной и параллелепипедной векторной системе скоростей трех взаимно перпендикулярных линейных гидроприводов, двухскоростного их переключения то на технологическую «медленную», то на маршевую «быструю» скорость холостых ходов, в том числе при мгновенном схемном «заимствовании» в другой фронтальности антиударных рокировок идентичных градиентов для подключения вектора большой косинусной скорости на отдергивание технологического инструмента в случае опасного его сближения с изделием.
В пневмоблоке А1 пневмоблок Б1 контурной рокировки поперечных подач на продольную следящую, формирования знака (±) пневмосигналов контурного поворота главной оси «чистого вращения» гироскопа и связи с энергетическим блоком снабжен пятью клапанами «И», входы которых связаны с шестью выходами пневмодатчиков, содержащих блоки щупов, реагирующих на геометрические перемены траектории слежения «с горки» и «на горку» по ходу технологического инструмента - один (И2), формирующий пневмосигнал подачи «поперечно вперед» и, второй (И1), формирующий пневмосигнал подачи «продольно» и оба, через пневмоклапаны ИЛИ, формирующие поправку «медленно», связи с гидроблоком Г1 (Б7) и с пневмоблоком Б2, третий (И3) и четвертый (И4) пневмоклапаны, формирующие в нечетном и четном полуциклах пневмосигнал «быстро назад» при диагональном рассогласовании совместно включенной пары пневмодатчиков щупов при встрече с впадиной траектории слежения и пневмосигнал на контурный поворот главной гироскопической оси в сторону «провалившегося» «с горки» впереди идущего щупа и пятый - блокировочный пневмоклапан (И5), формирующий при попадании технологического инструмента в угол по линии биссектрисы при ходе «на горку» пневмосигнал «быстро назад» и на поворот той же главной гироскопической оси в сторону, определяемую направлением слежения за счет изменения положения пневмотриггера 5/2, переключаемого пневмокомандами «нечет» или «чет», систему пневмоклапанов ИЛИ, к которой подключены пневмоблоки четвертого уровня управления: пневмоблок (Е1) переключений системы управления с вертикальной фронтальной плоскости XOZ на горизонтальную XOY и (Е2) - с XOY на XOZ, входы которых связаны с выходами жесткопрограммного пневмоблока Б5 для автоматической переналадки фронтальности и с выходами пульта управления ПУ, а также пневмоблок (Е3) автоматического переключения таймеров с первого электрореле времени, настроенного на один режим работы рабочего органа, на второе электрореле времени, настроенное на другой технологический режим через пневмотриггер (П3) и пневмоэлектрические датчики ПЭД1 и ПЭД2, переключаемые от Б5 пневмокомандами перемены фронтальности системы управления, и снабжен пневмоклапанами включения-выключения двухтактного импульсного пневмогидравлического насоса (ИН) в режиме «автомат» или «наладка» с пульта (ПУ) и включения питания сжатым воздухом блоков щупов и угловых пневмомуфт.
Пневмоблок второго уровня управления Б2 снабжен тремя пневмоблоками третьего уровня управления - первым (В1) цикловых рокировок соучастия и знака (±) направления контурного хода линейных гидроприводов в зависимости от фазового положения угловых пневмомуфт (Мх) 19 и [Mz(y)] 20 на главной оси «чистого вращения» гироскопа, вторым (В2) - автоматической и ручной полуавтоматической переналадки рабочего положения линейных гидроприводов и третьим (В3), состоящим из трех пар пневмоклапанов ИЛИ - вывода с выходов от первых двух пневмоблоков В1 и В2 пар пневмосигналов к логическому пневмогидроблоку Г1.
В пневмоблоке второго уровня управления Б2 пневмоблок третьего уровня управления В1 цикловых рокировок соучастия и знака (±) направления контурного хода линейных гидроприводов в зависимости от фазового положения угловых пневмомуфт содержит пневмотриггер К7 и пневмоклапан К8, а также два распределительных двузначных тандема золотников (- 4/2+4/2) РТ1 и РТ2, управляемых один пневмокомандами «поперечно-продольно», а другой - пневмокомандами перемены фронтальности и снабжен блоками золотников - одним (4/2×2) Бз3 и вторым - (4/2×3) Бз4; к правым торцам тандема золотников (-4/2+4/2)РТ1 и блока золотников (4/2×3) Бз3 параллельно подключены линия 77 «продольно» от пневмоблока Б1 и от него же линия 76 «вперед» параллельно к левым торцам блока золотников (4/2×2) Бз3 и пневмотриггера К7, к правому торцу которого подключена линия 78 «назад» от того же пневмоблока Б1 и обе линии «вперед» и «назад» поданы на входы первого пневмоклапана ИЛИ (ИЛИ 31), выход которого в линию «поперечно» подключен к пневмоблоку Б4 и к левому торцу тандема золотников (-4/2+4/2) РТ1, при этом выходы угловых пневмомуфт подключены к левым входам обоих золотников тандема РТ1 от [Mz(y)] 20, а к правым входам обоих золотников тандема РТ1 от (Мх) 19, при этом параллельно к линии управления пневмоклапана 4/2 К8 отведена линия выхода 44 пневмомуфты [Mz(y)] 20, а к входам пневмоклапана К8 присоединена пара линий от пневмоблока Б4 подключения глобулярного дополнительного привода Y к доминантному приводу во фронтальной плоскости XOZ, и во фронтальной плоскости XOY - подключения дополнительного привода Z; входы пневмоклапана И11 присоединены к линии «четно» от счетного пневмоблока СБ и к линии 77 «продольно» от пневмоблока Б1, выход И11 «четно» (203') присоединен к правому торцу блока золотников (4/2×3) Бз4, к левому торцу которого присоединен выход пневмоклапана ИЛИ24, один вход которого (201) «нечет» связан с тем же счетным пневмоблоком СБ, а второй вход - с линией 78 «назад» от пневмоблока Б1.
В пневмоблоке А2 пневмоблок второго уровня управления Б3 снабжен двумя пневмоблоками третьего уровня управления (В4) и (В5), причем первый пневмоблок В4 - формирования знака (±) «заимствования» в другой фронтальности градиента антиударного косинусного вектора скорости отдергивания технологического инструмента в сторону, противоположную его рабочей подаче, при опасном сближении инструмента с изделием во время установочной поперечной подачи рабочего органа, содержащий два пневмоклапана «И» - один (И12) - конъюнкции пневмосигналов от пневмодатчиков одновременного качания двух главных щупов с лицевой стороны контура слежения, а другой - (И 13) - одновременного качания двух вспомогательных щупов с изнаночной стороны контура слежения, выходы пневмоклапанов И12 и И13 присоединены к одинарным входам распределительного двузначного тандема золотников с функцией «то…, то» обратного подключения (-3/2+3/2) РТ3-1, управляемого с выходов пневмотриггера 4/2 (П9), парные левые выходы двух золотников тандема - плюс и минус - присоединены к паре входов «Y», а парные правые - перекрестно - к паре входов ±«Z» двух пневмоблоков (Е4 и Е5) четвертого уровня управления линейными гидроприводами Y и Z в пневмоблоке Б2, при этом от выходов пневмотриггера 4/2 П9 параллельно выведены линии мгновенного переключения фронтальности к пневмогидроблоку Г1, и второй пневмоблок (В5) - удержания нормали технологического инструмента к касательной волновой кривизны траектории слежения и быстрого увеличения зазора между изделием и технологическим инструментом при встрече с выпуклостью или впадиной во время продольной подачи содержит пневмоклапаны «ИЛИ» реагирования на неодновременное качание щупов с лицевой или изнаночной стороны контура слежения, при этом от одной группы пневмоклапанов ИЛИ пара выходов соединена с пневмогидроблоком Г2 поворотных гидроприводов, а именно с гидродвигателем манипулирования нормалью технологического инструмента гироскопа, а от второй группы пневмоклапанов ИЛИ - к рабочему органу, содержащему привод рабочей подачи и дополнительного отвода технологического инструмента при встрече с выпуклостью или впадиной траектории слежения.
Пневмоблок Б4 снабжен двумя пневмоблоками третьего уровня управления (В6) и (В7), причем первый пневмоблок В6 - рокировки доминантности продольной и поперечной подач широтного и меридионального склонения хода рабочего органа, содержащий распределительный двузначный тандем золотников (-3/2+3/2) РТ2 с функцией «то…, то» прямого подключения, управляемый через пневмотриггер 4/2 (П10) пневмосигналами с выходов шестилинейной угловой пневмомуфты (Мз)21, задающей широтные или меридиональные направления слежения, на главной гироскопической оси (11) «чистого вращения», к левым входам его золотников подключены выходы угловой пневмомуфты на оси прецессий [M)βy(z)] 23, а к правым - выходы угловой пневмомуфты [Mαy(z)] 22 на оси нутаций гироскопа, при этом параллельно эти же пары выходов угловых пневмомуфт на оси прецессий и нутаций поданы через два клапана «ИЛИ» к торцевым линиям переключения двух пневмоклапанов «И» (И9 и И10), к нормально закрытым линиям которых подключены выходы пневмотриггера 4/2 (П10), управляемого слева пневмосигналом «поперечно» (76/78), а справа - пневмосигналом 77 «продольно» от пневмоблока Б1 через пневмоблок Б2, выходы пневмоклапанов И (И9 и И10) - 154-155 и линии 152-153 рокировки доминантности подач «продольно»-«поперечно» с выходов пневмотриггера 4/2 (П10) поданы к пневмогидроблоку Б7 пневмогидроблока Г1, а одинарные выходы двузначного тандема РТ2 подключены к управлению доминантными взаимно перпендикулярными гидроприводами то X-Z, в вертикальной фронтальной плоскости XOZ, то X-Y - в плоскости XOY как дополнительные приводы - соответственно то X, то Z в пневмоблоке Б2; второй пневмоблок - В7 - догоняющего «скольжения» главной гироскопической оси 11 «чистого вращения», выполняемого нутациями и прецессиями для минимизации ее непараллельности наклону нормали технологического инструмента перпендикулярно касательной к волновому изгибу траектории слежения, содержащий распределительный двузначный тандем золотников с функцией «то…, то» (-3/2+3/2) РТ3-2 обратного подключения, управляемый параллельными линиями с выходов шестилинейной угловой пневмомуфты (Мз)21, задающей меридиональные и широтные склонения хода рабочего органа, к одинарным входам распределительного тандема РТ3-2 подключены выходы угловой пневмомуфты (Мωк)18 на оси манипулирования нормалью технологического инструмента, а парные двузначные выходы через две пары пневмоклапанов ИЛИ присоединены к пневмогидроблоку Г2 - поворотных гидроприводов, причем от левых выходов тандема (-3/2+3/2) РТ3-2 к гидроприводу прецессий (ГДβ) 17, а от правых - к гидроприводу нутаций (ГДα) 16 гироскопа, и через те же пары пневмоклапанов ИЛИ от соответствующих выходов пневмопульта управления ПУ для наладочных прецессий и нутаций; при этом пневмоблок В7 снабжен пневмоблоком Е8 четвертого уровня управления автоматической переналадкой фазы предварительного рабочего положения оси 12 прецессий через пару пневмоклапанов «НЕ12» и «НЕ14», переключаемых пневмокомандами путевых пневмоклапанов ВК20 и ВК21 поворотом кулачка 171 на той же оси 12 прецессий в пневмоблоке Б5 через правые входы дополнительных пневмоклапанов «ИЛИ» 54 и 55.
В пневмоблоке A3 пневмоблок Б5 снабжен единой системой путевых пневмодатчиков контроля ходов линейных и поворотных приводов как для консольного, так и для портального исполнения адаптивного робота, причем в последнем варианте трехкоординатная тележка перевернута гироскопом вниз, чем обусловлен плюсовой знак координаты Z ниже нулевой координатной точки, при этом в роботе консольного исполнения он снабжен пневмоцилиндром подвода трехкоординатной тележки к изделию на конвейере, а для робота портального исполнения предусмотрена подача изделия под рабочий орган гироскопа на сборочной тележке с ходами челночного типа, контролируемой путевыми пневмодатчиками, причем у робота консольного исполнения он снабжен пневмопультом РП пуска в работу, а у робота портального исполнения - двумя ручными пневмораспределителями 5/2, при этом также снабжен регулируемыми упорами-кулачками переключения путевых пневмоклапанов 3/2 контроля достижения точки предварительного рабочего положения (ТПРП) у начала траектории слежения; снабжен путевым пневмоклапанном 5/2 (ВК7), связанным со счетным пневмоблоком СБ при работе по разомкнутой и замкнутой траектории слежения и тремя пневмоблоками Е9, Е10 и Е11 четвертого уровня управления автоматической переналадкой робота для однофронтальной и двухфронтальной работ.
Пневмогидроблок Б7 второго уровня управления в пневмогидроблоке Г1 снабжен пневмогидрораспределителями - гидроблоком-триггером золотников (3/2×3) ГБз1 с двухскоростной функцией «медленно-быстро», управляемым справа пневмокомандой 182 «медленно», а слева - пневмокомандой 78 «быстро» от логического пневмоблока Б1, двумя пневмогидроаппаратами глобулярного склонения хода рабочего органа - отдельным 3/2 Гр4 НЕ, переключаемым пневмокомандой 154 «широтно», «псевдоширотно», и пневмогидроблоком золотников (3/2×2)ГБз2 НЕ, переключаемым пневмокомандой 155 «меридионально» - оба от логического пневмоблока Б4, при этом он снабжен пневмогидроблоком-триггером золотников (4/2×2) ГБз3 с функцией рокировок фронтальности, управляемым без антиударного «заимствования» другой фронтальности справа пневмокомандой «XOZ» и слева - пневмокомандой «XOY» от пневмоблока Б3, и отдельным пневмогидротриггером 4/2 Гр5 с функцией контурного переключения доминантности подач в плоской векторной системе X-Z или X-Y, управляемым справа пневмокомандой 153 «продольно», а слева - пневмокомандой 152 «поперечно» от пневмоблока Б4, причем векторные градиенты и величины скоростей доминантных, дополнительных и корректирующих подач линейных гидроприводов обеспечены соединением левых входов «Д» их гидрораспределителей 4/3 пневмогидроблока Б6 с выходами синусно-косинусных гидродатчиков гидрорезольверов на осях гироскопа - от гидрорезольвера (Грзγ)33 на главной гироскопической оси «чистого вращениям» - к входам Гр5 - левому от выхода гидродатчика (sinγx) 25 и перекрестно к нормально открытому входу Гр4, а к правому - от выхода гидродатчика [cosγz(y)] 26 и через Гр5 перекрестно - к правому входу правого золотника ГБз3 через Гр5, от гидрорезольвера (Грзα) 34 на оси нутаций - к входам левого золотника ГБз3 - к левому его входу от выхода гидродатчика [sinαy(z)] 28, а к правому входу того же левого золотника ГБз3 от выхода гидродатчика [cosαy(z)] 29 и от гидрорезольвера (Грзβ) 35 на оси прецессий - к левому входу правого золотника ГБз3 от выхода гидродатчика [sinβy(z)]31, а от выхода гидродатчика (cosβx)32 к нормально закрытому входу Гр4, при этом левые выходы двух золотников ГБз3 присоединены к паре входов левого золотника ГБз2, а правые - к паре входов правого золотника того же ГБз2, к каждой паре входов золотников (3/2×3) ГБз1 подключены регулируемые гидросопротивления - слева Rм - маршевого быстрого хода, а справа Rш - шагового «медленного» хода гидропривода, причем левые и правые гидросопротивления настроены на одинаковую или быструю, или медленную скорость хода для всех трех линейных гидроприводов, каждая пара гидросопротивлений параллельно соединена одной линией, причем первая и вторая - с выходом золотников НЕ (ГБз2), а третья - с выходом НЕ (Гр4), нормальнооткрытые входы ГБз2 НЕ присоединены к выходам правого золотника ГБз3, нормальнозакрытые - к выходам левого золотника того же ГБз3, а входы гидродатчиков 25-26, 28-29 и 31-32 присоединены к магистральной линии «Д».
Счетный пневмоблок СБ снабжен двумя четырехкомандными двоичными счетными пневмоблоками - один ДБ1 - отсчета нечетных и четных полуциклов возвращения закрученных коммуникаций рабочего органа в незакрученное состояние и второй ДБ2 - отсчета двойных ходов путевого пневмоклапана 5/2 ВК7 в жесткопрограммном пневмоблоке Б5 при работе во фронтальной плоскости XOY слежения по замкнутому контуру - в обоих случаях с выдачей цветового и/или звукового сигнала вызова рабочего-оператора для повторения очередного идентичного технологического перехода производственной операции.
На рабочий орган из пульта управления ПУ вынесен пневмотумблер 5/2 Т7 наладочного отвода пары блоков щупов и пневмодатчиков, которыми прикрыт доступ к сервисному обслуживанию технологического инструмента, например, в виде сварочных клещей и возвращения той же пары блоков щупов и пневмодатчиков в рабочее положение, причем нормальнооткрытая в атмосферу линия выхода пневмотумблера Т7 через первый ИЛИ4 из трех пневмоклапанов «ИЛИ» - к большому торцу дифференциального воздухораспределителя 5/2 ДПР3 управления пневмоцилиндром-фиксатором (ПЦ5) 40 рабочего положения одной или другой пары блоков щупов и пневмодатчиков, а нормальнооткрытый выход пневмотумблера Т7, в положении «автомат», соединенный с линией питания сжатым воздухом, подключен к большим торцам двух блокировочных дифференциальных воздухораспределителей 3/2 ДП1 и ДП2, в режиме «автомат» выполняющих роль логического элемента «НЕ» в подключении к большим торцам воздухораспределителей ДПР1 и ДПР2 обеих пар пневмоцилиндров (ПЦ3) 38 и (ПЦ4) 39 подвода-отвода пар блоков щупов и пневмодатчиков Щ1 и Щ2 линий выходов пары путевых пневмодатчиков 3/2 ВК14 и ВК15, одновременно переключаемых отводом пневмоцилиндра-фиксатора (ПЦ5) 40 и питаемых поочередно сжатым воздухом от пневмотриггера 5/2 П1, управляемого пневмокомандами XOY-XOZ (165'-166') от пневмоблока Б5, при этом выходы пары путевых пневмодатчиков ВК14 и ВК15 раздвоены - одна линия напрямую через один блокировочный воздухораспределитель 3/2, а другая - к малому торцу другого такого же блокировочного воздухораспределителя, а входы второго пневмоклапана ИЛИ5 «подвода» подключены к выходам путевых пневмодатчиков 3/2 ВК16 и ВК29, контролирующих окончание подвода блоков щупов и пневмодатчиков в рабочее положение к технологическому инструменту, а входы третьего пневмоклапана ИЛИ 3 «отвод» пневмоцилиндров 38 и 39 подключены к выходам путевых пневмодатчиков 3/2 ВК17-ВК28, контролирующих окончание отвода блоков щупов и пневмодатчиков от технологического инструмента, и параллельно - к малым торцам воздухораспределителей ДПР1 и ДПР2 управления пневмоцилиндрами отвода-подвода пар блоков щупов и пневмодатчиков Щ1 и Щ2, причем выход второго пневмоклапана ИЛИ 5 «подвод» подключен к малому торцу воздухораспределителя 5/2 ДПР3 и параллельно - к нормальнозакрытой линии первого пневмоклапана ДА1, нормальнооткрытая в атмосферу линия которого соединена с большим торцом блокировочного дифференциального пневмоклапана ДП3 автоматического отвода пневмоцилиндра-фиксатора (ПЦ5) 40 переключением через первый пневмоклапан ИЛИ4 вправо воздухораспределителя ДПР3 пневмокомандой 170' окончания работы в вертикальной фронтальной плоскости XOZ от пневмотриггера ВК26П или пневмокомандой 169' - в горизонтальной фронтальной плоскости XOY от пневмотриггера ВК27П пневмоблока Б5, а выход третьего пневмоклапана ИЛИ3 подключен к нормальнозакрытому входу второго пневмоклапана ДА2, нормальнооткрытая в атмосферу линия выхода которого соединена с линией управления первым пневмоклапанном ДА1, линия же управления ДА2 - с выходом путевого пневмоклапана НЕ3, контролирующего окончание фиксации пары блоков щупов и пневмодатчиков Щ1 или Щ2 пневмоцилиндром-фиксатором (ПЦ5) 40.
Технологический инструмент рабочего органа, содержащего привод рабочей подачи и дополнительного отвода технологического инструмента от изделия, например, в виде штоковых сварочных клещей (Цк) с С-образной скобой, содержащих соосный блок двух пневмоцилиндров сжатия электродов - силовой и предсжатия, который, как и силовой, помимо рабочего поршня, жестко соединенного со скобой полым плунжером, снабжен вторым - сервисным поршнем дополнительного отвода скобового электрода от изнаночной стороны фланцевого сварного соединения за счет хода этого второго сервисного поршня от заплечика центральной втулки, жестко соединенной, в отличие от центральной втулки силового пневмоцилиндра, с передней крышкой блока двух соосных пневмоцилиндров, при этом дополнительный отвод скобового электрода от изнаночной стороны фланцевого соединения изделия предусмотрен переключением второго пневмоклапана НЕ, управляемого, как «первый» пневмоклапан НЕ, от пневмоблока Б3, как и для дополнительного отвода штокового электрода от лицевой стороны того же фланцевого соединения, причем линия рабочего хода цилиндра предсжатия присоединена к выходу отдельного дополнительного пневмораспределителя 3/2 Кпс (Э1) через канал в штоке поршня силового пневмоцилиндра.
Система управления не требует инженерного обслуживания, характерного для роботов с программным управлением. Для нее достаточно иметь наладчика технологического оборудования и в службе механика - слесаря, знакомого с пневмо- и гидроавтоматикой. Предлагаемая система управления позволяет снизить требования к точности индексирования изделий на позициях поточных линий. В особый период ракетно-бомбовые удары, выводящие электронику из строя, не причиняют пневмоавтоматике вреда. Технический результат состоит также в том, что система способна выполнять следующие функции:
- поочередное управление роботом в двух фронтальных плоскостях декартова пространства,
- стартстопная и запоминающая функция, осуществляемая гидрозамками и пневмогидрораспределителями 4/3 с закрытым центром,
- слежение по плоскому и глобулярному контуру,
- автоматическое регулирование соотношения величин и градиентов (направлений) векторов скоростей линейных гидроприводов в прямоугольной и параллелепипедной векторной системе и стабилизация суммарного вектора скорости рабочего органа при любых пространственных изгибах траектории слежения,
- минимизация рассогласования параллельности главной гироскопической оси нормали технологического инструмента при волновых глобулярных изгибах контура слежения,
- автоматический поиск продолжения траектории слежения при се уходе на другую координату декартова пространства (поисковые ходы «назад-вперед» с поворотом главной гироскопической оси в направлении изгиба траектории слежения),
- двухскоростное перемещение рабочего органа: с быстрым (маршевым) холостым ходом и «медленными» подачами с технологической скоростью,
- управление в двух полуциклах - нечетном и четном - для возвращения закрученных коммуникаций в исходное незакрученное состояние,
- автоматическая смена щупов (различающихся функциональным устройством) при переходе к работе то в вертикальной, то в горизонтальной фронтальных плоскостях декартова пространства,
- автоматическая смена технологических режимов при переходе к работе в другой фронтальной плоскости,
- отработка детерминированных (дизайнерских) и вероятностных (случайных) геометрических возмущений в поведении траектории слежения с «заимствованием» схемных антиударных рокировок величин и градиентов скоростей линейных гидроприводов в другой фронтальности,
- аварийное отключение энергопитания по команде «стоп»,
- при случайном пуске возвращение в исходное положение, когда в пространстве робота нет изделия,
- наладочные функции: автоматическая переналадка исходных фазовых состояний осей гироскопа и линейных положений рабочего органа для автоматического перехода к слежению в другой фронтальной плоскости и ручная переналадка робота при смене модели изделия, а также при сервисном обслуживании технологического инструмента,
- звуковая и цветовая сигнализация окончания выполнения цикловых переходов производственных операций (всего 15 функций).
При всей полноте функциональных возможностей пневмогидравлическая система управления дешевле неадаптивных электронных систем программного управления.
При рассмотрении сущности пневмогидравлической системы управления адаптивным пневмогидравлическим роботом следует иметь в виду, что:
рабочим органом назван встроенный в гироскоп агрегат, содержащий технологический инструмент, питаемый встроенным или отдельным источником энергии, и имеющий привод рабочей подачи и дополнительного отвода от изделия инструмента при встрече с выпуклостью или впадиной траектории слежения.
Фронтальной плоскостью названа плоскость декартова пространства, на которую проецируется наибольшая часть контура траектории слежения.
Траекторией слежения назван контур, проведенный через центры (точки) элементарных обработок, последовательно расположенных в плоском или глобулярном пространстве робота. Применительно к штампованным отбортовкам фланцевого соединения, являющимся базой слежения при точечной контактной сварке, различается контурная кривизна ребра отбортовки и глобулярная волновая кривизна ленты ее изгиба. Контур траектории слежения может быть замкнутым и разомкнутым и иметь лицевую и изнаночную сторону.
Начальным положением названо фазовое состояние гироскопа, при котором все его оси параллельны или перпендикулярны плоскостям декартова пространства.
Исходным названо рабочее положение приводов робота в готовности к его включению.
Предварительным рабочим положением названо угловое фазовое состояние осей гироскопа и положение линейных приводов, при котором технологический инструмент занял позицию готовности к установочной рабочей поперечной подаче (к ребру ленты отбортовки).
Простым плоским контуром названо слежение по траектории, параллельной одной из плоскостей декартова пространства.
Пространственным плоским контуром названо слежение по плоской траектории с одним или двумя постоянными уклонами в трехмерное декартово пространство.
Глобулярным названо слежение по переменным уклонам в трехмерное декартово пространство. При этом имеют место две полярных глобулярных системы слежения: для вертикальной фронтальной плоскости - схема «сфера», при которой помимо изгибов «на ребро» имеются волновые изгибы ленты отбортовки в широтном или/и в меридиональном направлении; для горизонтальной фронтальной плоскости - схема «лодка», в которой за глобулярный полюс принят нос лодки со сходящимися к нему меридионально изогнутыми продольными ребрами - стрингерами, а поперечные ребра - шпангоуты - с псевдоширотным изгибом (см. фиг.2 и 3 и к ним таблицы 1 и 2).
Нормалью технологического инструмента названа линия его рабочей подачи, при контурном слежении параллельная главной гироскопической оси «чистого вращения» и перпендикулярная к траектории простого контурного слежения или - при глобулярном слежении - к касательной ее изгиба в широтном (псевдоширотном) или/и меридиональном направлении.
Рабочим ходом технологического инструмента названа его подача для выполнения повторяющихся элементарных производственных операций, например, сварных точек контактной сварки.
В перечне графических материалов (см. ниже) представлено:
на фиг.1 (БС) - блок-схема пневмогидравлической системы управления адаптивным пневмогидравлическим роботом, на фиг.2 (Сф) - глобулярная схема слежения «сфера» для вертикальной фронтальной плоскости XOZ, на фиг.3 (Лд1) - глобулярная схема слежения «лодка» для горизонтальной фронтальной плоскости XOY, на фиг.4 (ГРП) - гироскоп Новинькова, на фиг.5 (М) - угловые пневмомуфты знака (±) хода гидроприводов, на фиг.6 (Грз) - гидрорезольвер (устройство), на фиг.7 (РО) - кинематическая схема рабочего органа - сварочных клещей с пневмоцилиндром Цк, приводами отвода-подвода щупов Щ и блоками золотников Бз1 и Бз2, на фиг.8 (Цк) - принципиальная пневмосхема управления блоком пневмоцилиндров сжатия и дополнительного отвода электродов сварочных клещей, на фиг.9 (Цщ) - принципиальная пневмосхема автоматической смены блоков щупов и сервисного отвода и возвращения одной пары блоков щупов, на фиг.10 (Щ1) - блок щупов и пневмодатчиков слежения по отбортовкам переменной ширины: а) кинематическая развертка двух блоков щупов, б) тактильные щупы, в) пневмодатчик 3/2 ДА; на фиг.11 (Щ2) - блок щупов и датчиков слежения по отбортовкам постоянной ширины: а) кинематическая развертка двух блоков щупов, б) главный и вспомогательный щупы, в) пневмодатчик 3/2 ДА; на фиг.12 (Б 1.1) - логический пневмоблок рокировок поперечных на продольные подачи и контурных поворотов главной гироскопической оси «чистого вращения», на фиг.13 (Б 1.2) - дополнение к Б1.1: а) Е1 и Е2 - блоки автоматической переналадки фазы главной оси ±γ, б) Е3 - блок автоматической переналадки на другой режим сварки; на фиг.14 (Б2.1) - логический пневмоблок управления линейными гидроприводами, на фиг.15 (Б2.2) дополнение к Б2.1 - наладочные блоки Е4, Е5, Е6 и Е7, на фиг.16 (Б3) - блок быстрого реагирования на детерминированные (дизайнерские) и случайные геометрические возмущения, на фиг.17 (Б4) - блок плоского «скольжения» главной гироскопической оси «чистого вращения» нутациями и прецессиями вслед за нормалью технологического инструмента, на фиг.18 (Б5') - трехкоординатная тележка и рабочий орган робота консольного исполнения со щупами Щ2, клещами 10, цилиндром Цк и сварочным трансформатором (Св.тр.), система управления упорами, на фиг.19 (Б5.1) - принципиальная пневмосхема путевого жесткопрограммного управления роботом консольного исполнения (без элементов гироскопа) с логическими элементами «изделия нет», на фиг.20 (Б5.2) - кинематическая схема жесткопрограммного управления роботом портального исполнения упорами и поворотными кулачками на осях гироскопа в двух фронтальных плоскостях: XOZ и XOY, на фиг.21 (Б5.3) - первое дополнение к Б5.2: переходные состояния управления упорами до и после точки предварительного рабочего положения (ТПРП) РО, на фиг.22 (Б5.4) - второе дополнение к Б5.2: схема автоматической задержки переналадки переключения системы управления на другую фронтальную плоскость; на фиг.23 (Г1) - логический пневмогидроблок управления линейными гидроблоками: Б6 - пневмогидроблок управления знаком (±) хода линейных гидроцилиндров и Б7 - пневмогидроблок управления величиной и градиентами векторов скорости с «заимствованием» в другой фронтальности антиударного отдергивания технологического инструмента от столкновения с изделием, на фиг.24 (Г2) - пневмогидроблок управления поворотными гидроприводами, на фиг.25 (ИН) - двухтактный импульсный пневмогидравлический насос с элементами пуска и выключения, на фиг.26 (СБ) - счетный пневмоблок, состоящий из двух двоичных пневмоблоков ДБ, на фиг.27 (ДБ) - а) принципиальная пневмосхема ДБ, б) график последовательности работы элементов блока Б5.2 и ДБ; на фиг 28 (ПУ) - наладочный пневмопульт управления, на фиг.29 (Тр) - примеры траекторий слежения: а) к фиг.2 «сфера», б) к фиг.3 «лодка»; на фиг.30 (ТС) - пример технологической схемы сварки боковин малотоннажного автобуса: а) четные и нечетные подачи слежения в плоскости XOZ - поперечных швов (фиг.29а - нижняя траектория), б) четные и нечетные «обороты» по периметрам оконных проемов (фиг.29б); на фиг.31 (Лд2) - фазовые зоны работы угловых пневмомуфт по участкам траектории глобулярного слежения в плоскости XOY.
На фиг.1 показана блок-схема БС системы пневмогидравлического управления. Четыре основных блока обведены скругленными жирными замкнутыми контурами: 1-я часть - следящая и стабилизирующая система пневмо- и гидродатчиков в гироскопе с технологическим инструментом рабочего органа РО, блок логической пневмоавтоматики, блок пневмогидравлической логики, блок энергетический. Жирные линии - гидравлические связи между блоками БС, тонкие - пневматические связи, пунктирные - линии электросвязи.
На фиг.2 отражена глобулярная схема «сфера» - слежения робота в вертикальной плоскости XOZ, в которой нутации технологического инструмента происходят в меридиональном направлении «сферы», а прецессии - в широтном направлении. Глобулярная ось сферы - Z-Z декартова пространства. Углы склонения хода рабочего органа от начального положения: α - меридиональные нутации, β - широтные прецессии, γ - меридионально-широтные (и наоборот - широтно-меридиональные) повороты («чистое вращение») по контурному изгибу траектории.
На фиг.3 отражена глобулярная схема «лодка» - слежение робота в горизонтальной фронтальной плоскости XOY. Для горизонтальной фронтальной плоскости оба направления схемы «сфера» - меридиональны, поэтому системой управления половина (полушарие) сферы уложена «набок», т.е. глобулярная ось Z-Z совпала с осью Y-Y «сферы». В этом случае нижнее полушарие сферы названо «лодкой», в которой продольные ребра - стрингеры - меридионально сходятся (как к полюсу) к носу «лодки», а поперечные ее ребра - шпангоуты - имеют псевдоширотное направление. Следовательно, меридиональные нутации схожи с килевой качкой, а псевдопрецессии вдоль шпангоутов - с бортовой качкой. Ватерлиния лодки в спокойной воде - простой плоский контур слежения с поворотами на угол γ, а качка ватерлинии - пространственный плоский контур с уклонами: α - меридионально (вдоль у-у) и β - псевдоширотно (вдоль х-x).
На фиг.4 показан гироскоп Новинькова (патент RU №2221689 С2), свисающий с трехкоординатной тележки 1 на портале 150. Гироскоп содержит четыре оси: 9 - манипулирования нормалью N-N технологического инструмента 10 (сварочных клещей), 11 - «чистого вращения» (главной гироскопической оси), 12 - прецессий, 13 - нутаций. На осях - поворотные гидродвигатели ГД (14, 15, 16, 17, 59), гидрорезольверы Грз (33, 34, 35) с парными фазовыми синусно-косинусными гидродатчиками (25-26, 28-29 и 31-32) и угловыми пневмомуфтами М (19, 20, 21, 22 и 23) - см. фиг.1 БС. Кроме того, на осях гироскопа 11 и 12 имеются путевые кулачки: 171 с путевыми пнемоклапанами ВК20 и ВК21 и 172 с ВК22 и ВК23, а также на оси коленвала 58 (α') - смены фронтальности гироскопа - кулачок 156 с ВК18 и ВК19.
На фиг.5 (М) - крупно показаны угловые пневмомуфты (Мωк)18 на оси 9; (Мх)19, [Mz(y)]20 и (Мз)21 - на оси 11; [Mαy(z)]22 на оси 13 и [Mβy(z)]23 на оси 12 (круглые скобки в квадратных скобках означают перемену назначения в другой фронтальности - см. табл.3).
Устройство гидрорезольвера Грз (патент RU №2216441 С2) показано на фиг.6. Вращающийся золотник 55 имеет два параллельных прямоугольных отверстия 57, а корпус 54 - два взаимно перпендикулярных одинаковых круглых отверстия 56 (т.е. блок двух взаимно перпендикулярных русских «самоварных кранов» с общим золотником). В начальном положении ось золотника 55 каждого из двух гидрорезольверов перпендикулярна двум взаимно перпендикулярным направлениям хода линейных гидроприводов как третья ось декартова пространства, а сумма проходных гидросечений двух круглых взаимно перпендикулярных отверстий 56 их корпусов 54 всегда постоянна и равна условной единице (sin2+cos2=1), как квадрату гипотенузы (квадрат диаметра круглого отверстия), равному сумме квадратов катетов (sin2 и cos2) в прямоугольном треугольнике, вершина которого лежит (и вращается) на окружности круглого отверстия 56 корпуса 54, а совмещенные конгруэнтно в одну проекцию отсекаемые прямыми краями параллельных прямоугольных отверстий 57 золотника 55 хорды суть катеты прямоугольного треугольника. Насколько стрелка хорды-катета дифференциально отнимает часть диаметра одного круглого отверстия, настолько же дифференциально прибавляется часть диаметра другого круглого отверстия, делая их сумму равной единице (целому диаметру), и, следовательно, сумма проходных гидросечений интегрально всегда постоянная. То есть величина суммарного вектора скорости рабочего органа инвариантна к возмущениям (переменным синусу и косинусу дифференциально меняющихся длин хорд-катетов). Таким простым устройством как гидрорезольвер обеспечена дифференциально-интегральная функция системы стабилизации скорости следящего хода рабочего органа.
На фиг.7 показана кинематическая схема рабочего органа РО с технологическим инструментом, встроенного в гироскоп: 10 - С-образные сварочные клещи, имеющие с двух сторон блоки тактильных щупов и пневмодатчиков - Щ1 - слежения за отбортовками переменной ширины (патент RU №2218253 С2) и Щ2 - слежения за отбортовками постоянной ширины (a.c. SU №1109287 А), которые меняют друг друга автоматически пневмоцилиндрами (ПЦ3) 38 и (ПЦ4) 39 с фиксацией каждой пары блоков щупов в рабочем положении пневмоцилиндром (ПЦ5) 40. Клещи электрически присоединены к клеммам вторичных витков малогабаритного сварочного трансформатора (Св.тр.), первичная обмотка которого импульсно подключается к тиристорному контактору энергетического блока - блок-схемы БС (3 фазы 380 В). Показано присоединение и слив охлаждающей воды. Выходы пневмодатчиков 1…Х присоединены к входам пневмоблоков Бз1 (3/2×6) (контурный пневмоколлектор - блок золотников) и Бз2 (3/2×4) (глобулярный пневмоколлектор - блок золотников). Бз1 выходами 101×106 присоединен к пневмоблоку Б 1.1 (фиг.12), а Бз2 выходами 107×110 - к Б3 (фиг.16).
На фиг.8 (Цк) приведена принципиальная пневмосхема двух соосных пневмоцилиндров предсжатия, сжатия и дополнительного отвода электродов сварочных клещей от изделия. В отличие от патента RU №2221681 С2 в цилиндре предсжатия центральная втулка с заплечиком, функционально аналогичная такой же втулке в силовом цилиндре, жестко прикреплена к передней крышке блока цилиндров. Дополнительный отвод скобового электрода 36 выполнен пневмокомандой 82 от пневмоклапана ИЛИ 87 в пневмоблоке Б3 второго пневмоклапана НЕ2 (фиг.8) с отключением давления сжатого воздуха под вторым - вспомогательным - поршнем сервисного цилиндра предсжатия. Причем линия холостого хода, присоединенная к средней крышке блока пневмоцилиндров, сделана с ответвлением к нормально закрытому входу воздухораспределителя Рпит 1 - питания угловых пневмомуфт М (фиг.5) и пневмодатчиков щупов Щ1 и Щ2 (фиг.9 и 10) сжатым воздухом при слежении. Рпит 1 отключен пневмокомандой 184 или 194 через пневмоклапан ИЛИ 76. Линия рабочего хода поршня пневмоцилиндра предсжатия присоединена к выходу отдельного (дополнительного) пневмоэлектрораспределителя 3/2Кпс (Э1) через канал в штоке поршня силового пневмоцилиндра и отверстие в полом плунжере под силовым поршнем предсжатия.
На фиг.9 (Цщ) представлена пневмосхема автоматической смены блоков щупов парами пневмоцилиндров (ПЦ3-ПЦ3')38 и (ПЦ4-ПЦ4')39 (см. фиг.7 РО) и одним пневмоцилиндром-фиксатором (ПЦ5)40 переключением пневмотриггера 5/2 П1 пневмокомандами 165'(XOZ) или 166'(XOY) от пневмоблока Б5.2 по окончании всех переходов половины операции в одной из фронтальных плоскостей пневмокомандами 169' или 170'. А отвод пары блоков щупов и пневмодатчиков, закрывающих от наладчика сварочные клещи для их сервисного обслуживания, выполнен переключением выносного (из пульта ПУ - фиг.28) пневмотумблера Т7 наладочного пульта управления. Пневмоблок Цщ снабжен пневмоклапанами ИЛИ (3, «отвод», 4 и 5 «подвод»), тремя дифференциальными воздухораспределителями 5/2 ДПР (1,2 и 3), блокировочными дифференциальными воздухораспределителями 3/2 ДП (1,2 и 3), путевыми переключателями ВК16 - ВК17, последовательно соединенными по схеме «И», парой путевых пневмоклапанов ВК14 и ВК15 контроля отвода цилиндра-фиксатора (ПЦ5) 40 и одним пневмоклапаном 3/2 НЕ контроля окончания его хода вперед, а также двумя блокировочными пневмоклапанами 3/2 ДА (1 и 2) и воздухораспределителем 3/2 Рпит2, автоматически переключающим питание сжатым воздухом то в режиме «автомат», то в режиме «наладка» от пульта ПУ (фиг.28) по линиям 88 и 91.
На фиг.10 (Щ1) и 11 (Щ2) представлены блоки тактильных щупов и пневмодатчиков. На фиг.10 щупы (Щ1) с обеих сторон свариваемых отбортовок переменной ширины поперечного шва облицовки, например, боковины малотоннажного автобуса одинаковы - в виде роликов - и при слежении опираются скругленными образующими на ее изнаночную сторону, а своими полусферами охватывают две отбортовки секций боковины. В роли предохранительных выступают рычаги в виде коленчатых валиков, которые подгибают «коленки» при встрече с выпуклостью во время хода «на горку».
На фиг.11 главными являются полусферические с ребордами щупы Щ2 70 и 70' с лицевой стороны отбортовки фланца оконного проема боковины, а вспомогательными поименованы конические щупы 71 и 71', контактирующие с изнаночной стороной отбортовки оконного проема, в роли предохранительных выступают щупы-усики 73-74 на рычагах 72 и 75, реагирующие на выпуклость ребра отбортовки (положительную амплитуду) траектории слежения при ходе «на горку».
Пояснения к остальным фигурам перечня графических материалов сделаны в порядке описания состава блоков системы управления.
Первый пневмоблок второго уровня управления Б1 в пневмоблоке А1 (БС - фиг.1) состоит из двух подблоков - Б 1.1 (фиг.12) и Б 1.2 (фиг.13). Блок Б 1.1 снабжен пятью пневмоклапанам И: И1 - формирования пневмокоманды 77 «продольно» совместными пневмосигналами 101 и 102, И2 - формирования пневмокоманды 76 «вперед» совместными пневмосигналами 103 и 104 от исходно прижатых пневмоклапанов III и IV (Щ1 и Щ2 фиг. 10 и 11), И3 и И4 - формирования пневмосигнала контурного поворота главной гироскопической оси 11 «чистого вращения» ±γ в сторону, провалившегося «с горки» впереди идущего щупа: в четном полуцикле ±γ (пневмосигнал +99), в нечетном - минус γ (пневмосигнал минус 100). Пневмоклапан И5 - формирования пневмосигнала «биссектриса» предусмотрен на случай одновременного срабатывания предохранительных щупов-усиков 73 и 74 (фиг.11). Второй подблок Б 1.2 (фиг.13) снабжен переналадочными пневмоблоками четвертого уровня управления: E1 - переналадки фазы угла γ оси 11 гироскопа при смене фронтальной плоскости XOZ на XOY, a E2 - при обратной смене с XOY на XOZ. В Е1 для этой функции предусмотрены две пары пневмоклапанов И7-НЕ9 и И6-НЕ10, а в E2 - одна пара И8-НЕ8. Кроме того, пневмоблок Е3 - для автоматической перемены режима сварки содержит пневмотриггер П6 - смены фронтальности и два пневмоэлектрических датчика ПЭД1 и ПЭД2, подключающих то электрическое реле времени РВ1, то РВ2 в энергетическом блоке БС (фиг.1). Пневмоблок Б 1.1 снабжен также системой пневмоклапанов (П15, ДП6, ИЛИ 24 и др.) включения - выключения питания сжатым воздухом рабочего органа и гидродавления для линейных и поворотных гидроприводов по жесткой программе от пневмоблока Б5.
Второй пневмоблок второго уровня управления Б2 в том же пневмоблоке А1 первого уровня управления состоит также из двух подблоков Б2.1 (фиг.14) и Б2.2 (фиг.15). Подблок Б2.1 снабжен тремя пневмоблоками третьего уровня управления В1, В2 и В3. Первый - В1 - цикловых рокировок соучастия и знака (±) направления следящего хода линейных гидроприводов снабжен двумя распределительными двузначными тандемами золотников (- 4/2+4/2) РТ1 и РТ2, двумя пневмоблоками золотников Бз3 (4/2×2) и Бз4 (4/2×3), а также пневмотриггером 4/2 К7 и пневмоклапаном 4/2 К8, двумя пневмоклапанами ИЛИ24 и ИЛИ31 - и пневмоклапаном И11 конъюнкции пневмосигнала 77 «продольно» от Б1.1 и пневмосигнала 203 «четно» к правому торцу Бз4. При этом к левому торцу этого блока золотников подключена линия 201' «нечет» выхода с пневмоклапана ИЛИ24, входы которого соединены с линией 78 «назад» от Б 1.1 и с линией 201 «нечет» от СБ. Остальные внутренние связи показаны в В1 фиг.14. Внешние входы В 1: от Б 1.1 - 76 «вперед», 77 «продольно» и 78 «назад», линии 42-43 от (Мх)19, 44-45 от [Mz(y)]20, а также 85-86 к входам пневмоклапана К8 от пневмоблока Б4. Выходы из В1 - внутренние от трех пар линий выходов золотников Бз4: отдельная пара (±«X») напрямую с выходов правого золотника к ИЛИ29 и ИЛИ30 пневмоблока В3 и две пары от выходов левого и среднего золотника к распределительному двузначному тандему золотников (- 4/2+4/2) РТ1-2, управляемому от пневмоблока Б5.2 (фиг.20) пневмокомандами 165' («XOZ») слева и 166' («XOY») справа. Пневмоблок В3 «ИЛИ» соединен тремя парами линий с вторым подблоком Б2.2 (фиг.15) пневмоблока Б2 и состоит из трех пар пневмоклапанов: ИЛИ25…30. Подблок Б2.2 состоит из трех пневмоблоков четвертого уровня управления Е4 (Y), E5 (Z), E6 и Е7 (X). Пневмоблок - В2 третьего уровня управления - для подвода рабочего органа к точке предварительного рабочего положения ТПРП и от точки ТПРП к исходному положению, а также для автоматической и ручной переналадки состояния линейных гидроприводов. В2 имеет три пары выходов к В3: +144 и (-)145(у); (-)146 и +147(z);
(-)148 и +149 (х) через его пневмоклапаны ИЛИ (25-26; 27-28 и 29-30).
Пневмоблок А2 - глобулярного слежения первого уровня управления содержит два пневмоблока второго уровня управления: Б3 (фиг.16) и Б4 (фиг.17). Пневмоблок Б3 - глобулярного манипулирования нормалью технологического инструмента и быстрого реагирования на геометрические возмущения - снабжен двумя пневмоблоками третьего уровня управления: В4 и В5. В4 - мгновенного схемного «заимствования» при установочной поперечной подаче косинусной величины (вместо синусной - данной фронтальности) при схемной идентичности векторных градиентов - одной и той же для фазового состояния гидрорезольвера одного и того же векторного прямоугольника при опасном сближении технологического инструмента с изделием - снабжен двумя пневмоклапанами И: И12 - конъюнкции одновременных пневмосигналов 107 и 108 с лицевой стороны фланцевого соединения и И13 - конъюнкции одновременных пневмосигналов 109 и 110 с изнаночной стороны фланцевого соединения. Выходы И12 и И13 раздвоены: минусовые пневмосигналы - одна ветвь к правому торцу пневмотриггера 4/2 П9 и к правому одинарному входу распределительного двузначного тандема золотников (- 3/2+3/2) РТ3-1 обратного подключения, а плюсовые - соответственно - к левому торцу П9 и левому входу того же тандема РТ3-1. Выходы П9 мгновенного схемного «заимствования» (выдачи пневмосигнала 165'' вместо пневмосигнала 166'' схемного «заимствования» для фронтальной плоскости XOZ доминантного вектора скорости в схеме XOY) и, наоборот, пневмосигнала 166'' вместо 165'' для фронтальной плоскости XOY «заимствования» в схеме XOZ к гидроблоку Г1 (Б7 фиг.23). Выходы РТ3-1 - крайние - напрямую в линии (+)136 и (-)139, - а средние - перекрестно в линии (-)137 и (+) 138. Пневмосигналы 136 и 137 к пневмоблоку Е4 (Y), а пневмосигналы 138 и 139 - к Е5 (Z) в схеме на фиг.15; В5 - пневмоблок удержания нормали технологического инструмента к касательной волновой кривизны траектории слежения и быстрого увеличения зазора между изделием и технологическим инструментом при встрече с выпуклостью или впадиной во время продольной подачи - снабжен пневмоклапанами ИЛИ реагирования на неодновременное качание щупов с лицевой или изнаночной стороны контура слежения (70-71 Щ2 фиг.11) увеличением зазора между электродами сварочных клещей - раздельно по пневмосигналу 82 с выхода ИЛИ 86 отвода штокового электрода 37 пневмокомандой 107 или 108 от выпуклости с лицевой стороны фланцевого соединения или по пневмосигналу 83 - отвода скобового электрода 36 пневмокомандой 109 или 110 от впадины изнаночной стороны фланцевого соединения (или при встрече с ложементом оснастки на сборочной тележке). Одновременно с отводом скобового электрода 36 схемой предусмотрен поворот (манипулирование) плоскости сварочных клещей вокруг оси 9 (- ωk) - в сторону опускания вспомогательного щупа конического 71 в нечетном полуцикле и симметрично в четном полуцикле. Второй пневмоблок Б4 (фиг.17) второго уровня управления в пневмоблоке А2 первого уровня управления - формирования пневмосигналов знака (±) догоняющего поступательного «скольжения» главной гироскопической оси 11 «чистого вращения» для минимизации рассогласования ее параллельности нормали технологического инструмента прецессиями в широтном (псевдоширотном) и нутациями в меридиональном направлении снабжен двумя пневмоблоками третьего уровня управления В6 и В7: первый - В6 - рокировки доминантности продольной и поперечной подач широтного и меридионального склонения хода рабочего органа (табл.1 и 2), содержащий распределительный двузначный тандем золотников (- 3/2+3/2) РТ2 с функцией «то…, то» прямого подключения, управляемый через пневмотриггер 4/2 П10 пневмосигналами с выходов 46 и 47 шестилинейной угловой пневмомуфты (Мз)21 на главной гироскопической оси 11 (фиг.4) «чистого вращения». К левым входам золотников РТ2 подключены выходы 50 и 51 угловой пневмомуфты [Mβу(z)]23 на оси 12 прецессий, а к правым - выходы 48 и 49 угловой пневмомуфты [Mαу(z)]22 на оси 13 нутаций гироскопа. Выходы 50 и 51 пневмомуфты 23 подключены к входам пневмоклапана ИЛИ32, а выходы 48 и 49 угловой пневмомуфты 22 - к входам пневмоклапана ИЛИ33, выходы которых (ИЛИ32 и ИЛИ33) подключены к торцевым линиям переключения пневмоклапанов И9 и И10, к нормально закрытым линиям которых присоединены выходы 152 и 153 с выходов пневмотриггера 4/2 П10, управляемого слева пневмокомандой 76/78 «поперечно», а справа - пневмокомандой 77 «продольно» от пневмоблока Б1.1 (фиг.12) через пневмоблок Б2.1 (фиг.14). Выходы 154 и 155 пневмоклапанов И9 и И 10 и линии 152-153 от П10 поданы к пневмогидроблоку Б7 пневмогидроблока Г1. Одинарные выходы 85 и 86 тандема РТ2 выведены из Б4 к пневмоблоку Б2.1 для подключения то дополнительного гидропривода Y к одному из доминантных гидроприводов X-Z (табл.1), то гидропривода Z к доминантному гидроприводу из пары X-Y (табл.2). Второй пневмоблок В7 третьего уровня управления - пневмоблока Б4 - догоняющего «скольжения» главной гироскопической оси 11 «чистого вращения», выполняемого нутациями и прецессиями для минимизации ее непараллельности наклону нормали технологического инструмента перпендикулярно касательной к волновому изгибу траектории слежения снабжен распределительным двузначным тандемом (-3/2+3/2) РТ3-2 - обратного подключения, одинарные входы которого подключены к выходам 52 и 53 угловой пневмомуфты (Мωк) 18 (фиг.5), а торцевые линии управления присоединены к выходам 46 и 47 угловой пневмомуфты (Мз)21. К нормальнооткрытым выходам тандема РТ3-2 через пневмоклапаны ИЛИ50 и ИЛИ51 присоединены линии 133(-)α и 133+α поворотного гидропривода нутаций (ГДα)16 (фиг.4) и Г2 (фиг.24), а к нормальнозакрытым (золотники тандема - влево) - через пневмоклапаны ИЛИ 5 и ИЛИ 53 присоединены к линиям +134 и (-)135 поворотного гидропривода прецессий (ГДβ)17, но это присоединение выполнено еще и через ИЛИ54 и ИЛИ55 переналадочного блока Е8 - четвертого уровня управления, содержащего кроме них пневмоклапаны НЕ13 и НЕ14, переналадочные нормально открытые линии 169 и 170 которых линии 157 и 158 подключены от пневмоблока Б5.2 (фиг.20).
Жесткопрограммный пневмоблок A3 первого уровня управления (БС фиг.1) состоит из трех логических пневмоблоков второго уровня управления: Б5, СБ и Пу. Блок Б5 представлен пятью схемами: Б5' (фиг.18), Б5.1 (фиг.19), Б5.2 (фиг.20), Б5.3 (фиг.21) и Б5.4 (фиг.22). Кинематическая схема Б5' (фиг.18) робота консольного исполнения показана с системой пневмодатчиков путевого управления линейными гидроцилиндрами. Связь пневмодатчиков ВК с пневмоблоками Б 1.1, с периферийным транспортом поточной линии, со счетным пневмоблоком СБ (фиг.26), пневмоблоком Цк (фиг.8) и ИН (фиг.25) представлена принципиальной пневмосхемой Б5.1 (фиг.19). Особенностью пневмосхемы Б5.1 является наличие пневмодатчиков ВК8-ДП4 и симметричных им ВК10-ДП5 - «изделия нет», возвращающих случайно (или наладчиком) вызванный в предварительное рабочее положение робот из исходного положения, когда подача изделий на конвейере прекращена. Снабжен путевым пневмодатчиком ВК1 - начала автоматической работы, выдающим пневмокоманду, когда в пространство робота подано изделие и путевым пневмодатчиком 5/2 ВК2П, контролирующим возвращение трехкоординатной тележки в исходное положение и подающим с правого выхода пневмосигнал датчику ПЭД3 вызова периферийного транспортера с очередным изделием. Схемой предусмотрена работа с укороченным тактом производства, например, с разомкнутым контуром траектории (полупериметром) с контролем от пневмодатчика 5/2 ВК7, связанным со счетным пневмоблоком СБ (фиг.26). Пневмосхема Б5.1 не отражает участия пневмодатчиков перехода к работе в другой фронтальной плоскости. В этом состоит ее упрощение, о котором говорит название патента RU №2208513 С2. Но это не исключает возможности работы гироскопа робота консольного исполнения в двух фронтальных плоскостях XOZ (показано на фиг.19) и XOY.
На фиг.20 представлена принципиальная пневмосхема Б5.2 для адаптивного робота портального исполнения по патенту RU №2224637. Для этой схемы трехкоординатная тележка 1 поставлена на направляющие портала 150 (фиг.4 и фиг.20) гироскопом вниз. Сохранены номера путевых пневмодатчиков, присущих пневмосхеме Б5.1. Участие сборочной тележки 151, предназначенной для работы по челночному принципу, начинается в автоматическом режиме только после ручного ее вкатывания под портал и ручного переключения то пневмораспределителя РР1, то - РР2 (в схеме Б5.1 ручное включение начала от пульта РП). Кулачковая система переключения путевых пневмодатчиков вывода рабочего органа к точке предварительного рабочего положения (ТПРП) для случая работы во фронтальной плоскости слежения XOZ отражена на пневмосхеме Б5.3 (фиг.21). Ход «Ж» вниз до переключения кулачком 185 пневмопереключателя ВК6, пневмосигнал 183 которого является началом поперечной рабочей подачи, включаемой от Рпит1 в Цк (фиг.8), подающего питание сжатым воздухом угловых пневмомуфт и пневмодатчиков щупов на выполнение рокировок в Б1.1, Б2.1 и т.п., а пневмосигнал 184 от кулачка 186 - отключения автоматики слежения переключением ВК8. Точка ТПРП для фронтальной плоскости XOY существенно ниже, чем для XOZ. Питание сжатым воздухом к пневмоклапану ВК10П подключено только с линии 166', и он находится в состоянии ожидания перехода на работу в плоскости XOY. На сборочной тележке 151 свои проходные кулачки-упоры: 174 (на фиг.20 снизу слева под тележкой 151) - окончания работы в плоскости XOZ ходом вправо к ВК26П и 175 (на фиг.20 над правым краем сборочной тележки 151) - окончания работы в плоскости XOY. Их пневмосигналы служат для контроля кантовки главной гироскопической оси 11 «чистого вращения» вместе с рабочим органом - сварочными клещами на 90°. Кулачок 156 на оси 58 (крупно показан на фиг.4 и мелко на фиг.20) попеременно переключает ВК18 и ВК19, которые переключают пневмораспределитель 5/2 Рпит4. Команды 165' и 166' от Рпит4 с фиг.20 подключены к пневмоблокам в семи адресах (Б1.2, Б2.1, Б3, Цк, Цщ, РО и Г1) плюс на фиг.20 питание: ВК4'' и 24, ВК5' и 25, ВК6 и ВК8, а также ВК11, 12 и 13, РР1 и РР2 и на отключение ВК26П и ВК27П. Чтобы исключить преждевременный поворот оси 58 (на угол α'=90°) до окончания выполнения названных переналадочных пневмокоманд 165' и 166', предусмотрен пневмоблок Б5.4 «задержки» (фиг.22) с двумя пневмоблоками Е9 и Е11 четвертого уровня управления. Каждый пневмоблок Е9 и Е11 снабжен тремя пневмоклапанами «И»: в Е9-И16, И17 и И20, а в Е11 - И18, И19 и И21. К линиям переключения И17 и И19 подключена линия 200' с выхода пневмотриггера 3/2 П11, включаемого слева по линии 200 от путевого пневмоклапана НЕ3, контролирующего фиксацию смены щупов (фиг.9), а справа выключаемого в исходное положение с выхода пневмоклапана ИЛИ95, входы которого подключены к линиям 205 и 206. Параллельно линия 200 соединена с линией переключения пневмоклапана НЕ 17, у которого нормально открытая линия питания сжатым воздухом подключена к нормально закрытому входу пневмотриггера П11. К нормальнозакрытым линиям И17 и И19 параллельно подключена линия 179 от путевого пневмоклапана 5/2 ВК7 (фиг.19 и 20). В Е9 к входам И16 подключены линии: 158 (+)β от ВК21 в Б5.2 ( фиг.20) и 159 (минус γ от ВК23). А в пневмоблоке Е11 наоборот: к входам И18 подключены: линия 157 (минус γ от ВК20) и 160 (+γ от ВК22). Контроль согласованной задержки поворота оси 58 в Е9 - перехода с XOZ на XOY возложен на И20 - конъюнкции пневмосигналов от И16 и И17, а в Е11 - возвращения с XOY к XOZ - на И21 - конъюнкции пневмосигналов с выходов И18 и И19. При этом с выхода И20 через ИЛИ75 проходит пневмосигнал 205 на поворот оси 58 (ее коленвала +α') против часовой стрелки, а с выхода И21 через ИЛИ7 - пневмокоманда 206 на возвратный поворот коленвала оси 58 минус α' на 90° гидроприводом (ГДα')59 в гидроблоке Г2 (фиг.24). Этой же цели - переналадке фронтальности - служит пневмоблок четвертого уровня управления Е10 непосредственно на фиг.20 (над РР2 и правым положением кулачка 175 тележки 151). Он снабжен двумя пневмоклапанами «ДА», последовательно соединяющего по схеме ИЛИ (71) с атмосферой линию питания пневмоклапана ВК7, имеющего двоякое назначение: а) автоматической переналадки фронтальности с XOZ на XOY по окончании первой половины технологической операции, б) цикловой работы с пневмоблоком СБ (фиг.26) по каждому оконному проему до окончания второй половины технологической операции (и вновь - для переналадки с XOY на XOZ).
На фиг.23 представлен пневмогидроблок Г1 первого уровня управления, состоящий из блоков второго уровня управления Б6 и Б7. В пневмогидроблоке Б6 - три гидрораспределителя 4/3 с закрытым центром, пневмоуправляемых от пневмоблока Б2.1: Гр1 (±Y), Гр2 (±Z), Гр3 (±Х). Выходы Гр1…Гр3 подключены к гидрозамкам Гз с функцией удержания в памяти положения «стоп». Вход каждого гидрораспределителя 4/3 подключен к линии Д - высокого гидродавления от логических пневмогидропереключателей и гидрорезольверов, а выход - к линии Б («бака», но гидросистема замкнутая, и «бак» имеется только для компенсации утечек - не показан).
Логический гидроблок Б7 определяет величины векторов скоростей двух взаимно перпендикулярных гидроцилиндров - доминантного и дополнительного - в прямоугольной векторной системе, а склонение прямоугольной векторной системы в направлении хода третьего - гидроцилиндра-корректора - создает вектором-апликатой параллелепипедную векторную систему суммарного вектора скорости рабочего органа (табл.1 и 2) и обладает функцией стабилизации его скорости, инвариантной (независимой) к любым изгибам траектории слежения. Годограф суммарного вектора скорости - сфера, т.е. в любом направлении декартова пространства величина суммарного вектора постоянна.
Двухскоростная функция обеспечена пневмогидроблоком-триггером (3/2×3) ГБз1, управляемым справа пневмокомандой 182 «медленно», а слева - пневмокомандой 78 «быстро» от логического пневмоблока Б1. Функция глобулярного склонения хода рабочего органа (фаза волнового изгиба по ленте отбортовки) выполнена двумя пневмогидроаппаратами НЕ: пневмогидроблоком золотников (3/2×2) ГБз2 и отдельным пневмогидроклапаном 3/2 Гр4, которые переключаются от Б4: первый - пневмокомандой 155 (α) «меридионально», второй - пневмокомандой 154 (β) «широтно» («псевдоширотно»). Функция рокировок фронтальности обеспечена пневмогидроблоком-триггером (4/2×2) ГБз3, управляемым справа пневмокомандой «XOZ», а слева - пневмокомандой «XOY» от пневмоблока Б5.2. Функция рокировок фронтальности включает в себя и «заимствование» косинусного вектора в другой фронтальности (команды в скобках (XOZ) вместо XOY и, наоборот, от Б3) для антиударного отдергивания технологического инструмента в случае опасного его сближения с изделием во время поперечной подачи рабочего органа. Для работы с простым плоским контуром функции рокировки доминантности в плоской векторной системе X-Z или X-Y предусмотрен отдельный пневмотриггер 4/2 Гр5, управляемый справа пневмокомандой 153 «продольно», а слева пневмокомандой 152 «поперечно» от пневмоблока Б4. Используется Гр5 и для создания параллелепипедной векторной системы подключением гидродатчика (sinγx)25 в гидрорезольвере (Грзγ)33 на главной гироскопической оси «чистого вращения» синусным склонением плоской векторной системы (см. таблицы 1 и 2) следящими подачами с участием гидропривода-корректора вдоль ребра глобулярного контура слежения. Надобности подключать гидродатчик [cosγz(y)]26 в гидрорезольвере (Грзγ)33 нет, т.к. каждые 45° его вращения синус обращается в косинус, что обеспечивает сферический годограф суммарного вектора.
На фиг.24 показана принципиальная пневмогидросхема Г2 управления поворотными гидроприводами. Как и в схеме Г1, на входы гидродвигателей с выходов пневмогидрораспределителей 4/3 с закрытым центром (Гр14, 15, 16, 17 и 18) давление с линии Д подано через гидрозамки Гз, обеспечивающие функцию запоминания фазы углового сдвига валов поворотных гидродвигателей, после команды «гидростоп».
На фиг.25 показана принципиальная пневмогидросхема двухтактного импульсного пневмогидравлического насоса (патент RU №2252336 С1) с элементами пневмопуска в работу и выключения. Элементы пуска в работу выполнены в виде пневмоклапана ИЛИ82 и пневмоклапана Rпит3 «гидро» по пневмосигналу 176 (или 162) от пневмоблока Б1.1 (П15) на фиг.12 до включения питания сжатым воздухом М и Щ пневмокомандой 170 (169 в плоскости XOY) от ИЛИ67 в Б5.2 (фиг.20) при ходе к точке ТПРП. При этом питание сжатым воздухом пневмоклапана Rпит3 подано к его нормальнозакрытому входу через пневмоклапан НЕ 15 в ПУ (фиг.28) с линии 88 в режиме «автомат», а в режиме «наладка» - с линии 91.
На фиг.26 представлена блок-схема СБ - счетного пневмоблока, состоящего из двух двоичных счетных пневмоблоков ДБ1 и ДБ2. Первый - ДБ1 - с функцией «чет»-«нечет», второй - ДБ2 - с функцией «замкнутый периметр». Его отключение сокращает вдвое (или более…) время цикла сварки заменой замкнутого периметра на разомкнутый за счет прекращения хода рабочего органа при первом переключении путевого пневмодатчика ВК7(фиг.19 и 20).
На фиг.27а показана принципиальная пневмосхема двоичного счетного пневмоблока ДБ на примере участия в его работе путевых пневмоклапанов ВК4 (24) и ВК5 (25) в принципиальных пневмосхемах (фиг.19 и 20), роботов консольного и портального исполнения, а на фиг.27б приведен график последовательности срабатывания двух пневмоклапанов 5/2 XI и XII, составляющих схему ДБ в зависимости от пневмосигналов 176 «отсчет» и 177 «возвращение». Причем выходы «чет» и «нечет» (102 и 204) связаны с цветовым сигналом (надувание цветной мембраны в тупиковой прозрачной колбе…) или/и с сиреной вызова рабочего-оператора для очередной передвижки сборочной тележки на шаг между повторяющимися сварными соединениями технологическими переходами одной и той же части операции.
На фиг.28 показана принципиальная пневмосхема наладочного пневмопульта ПУ, содержащего 8 пар кнопочных пневмоклапанов «ДА» 3/2 (Кн3…18) наладочного управления гидроприводами: Кн3…Кн8 - линейными, Кн9…Кн16 - поворотными, а Кн17 и Кн18 - поворотным гидроприводом смены фронтальности. ПУ снабжен семью пневмотумблерами:
Т1 «автомат»-«наладка», Т2 «сварка-без сварки», Т3 «быстро-медленно» (показан пунктирно с линиями 210-211, как необязательный), Т4 «периметр-замкнутый-разомкнутый», Т5 отключения питания щупов и пневмомуфт, Т6 «один-два» фронта (например, боковина фургона не имеет окон - работа только в плоскости XOZ фиг.30.а) и вынесенный в рабочий орган - Т7 - сервисного отвода блоков щупов (см. Цщ - фиг.9). Кроме того, снабжен отдельным подблоком аварийного отключения питания сжатым воздухом по пневмокоманде «стоп» пневмокнопкой Кн2 (тип НЕ 3/2 с большой красной кнопкой). Включение питания сжатым воздухом обеспечено пневмокнопкой Кн1 ДА 3/2 через пневмоклапан обратной связи от магистрального выхода воздухораспределителя-триггера ПР и через пневмокнопку КН2 (НЕ 16) «стоп».
На фиг.29 показаны примеры траекторий слежения: а) к фиг.2 «сфера» - верхний глобулярный контур типа ветрового проема кузова, нижняя - простой плоский контур; б) к фиг.3 «лодка» - варианты оконных проемов: плоский прямоугольный ПРСТ, наклонный П'P'C'T'' и цилиндрический (с точками C''' и Т''').
На фиг.30а показана технологическая схема готовности к сварке поперечных фланцевых швов в вертикальной плоскости XOZ секций облицовки боковины малотоннажного автобуса (см. траекторию АБОВГ на фиг.29а). Четные и нечетные полуциклы показаны жирными стрелками *1, 150 - портал робота, 151 - сборочная тележка слева от портала. На фиг.30б эта же сборочная тележка справа с прямоугольными замкнутыми стрелками четных и нечетных «круговых» фланцевых швов *2 в горизонтальной плоскости XOY декартова пространства в четном и нечетном полуциклах.
На фиг.31 показаны зоны подключения сжатого воздуха к выходным каналам угловых пневмомуфт на главной оси 11 «чистого вращения» гироскопа согласно таблице 4 для глобулярного контура в плоскости XOY.
Пневмогидравлическая система управления адаптивным пневмогидравлическим роботом работает следующим образом.
Непрерывность минимизации непараллельности главной гироскопической оси нормали технологического инструмента при глобулярном слежении
При простом и пространственном плоском контурном слежении главная ось 11 гироскопа «чистого вращения» перпендикулярна плоскости контура слежения. Главная ось и технологический инструмент составляют как бы заостренный жесткий флюгер, у которого флажок - это плоскость сварочных клещей с точкой смыкания электродов в заостренном мыске. При обходе плоского контура мысок флюгера следит за изгибом ребра ленты отбортовки фланцевого соединения, причем плоскость флажка перпендикулярна ребру отбортовки (или касательной его изгибу). Как только глобулярная траектория слежения начнет волной изгибать ленту отбортовки фланца, так у флюгера - клещей 10 (фиг.4) обнаруживается своя ось 9 (ωк) вращения плоскости клещей, проходящая параллельно вылетам электродов через точку их смыкания. Нормаль N-N технологического инструмента поворачивается вслед за касательной волнового изгиба траектории слежения. При этом нормаль N-N ускользает из плоскости флагштока (оси 11) и оси 9 флюгера, нарушая параллельность оси 11 нормали N-N. Система управления это рассогласование сводит к минимуму, чтобы при перемене координатной оси контура слежения в декартовом пространстве не потерять чувствительности щупов при поисковых ходах клещей назад-вперед и найти продолжение траектории слежения. Происходит это за счет догоняющего «скольжения» (как ротора за вращением магнитного поля в асинхронном электродвигателе) главной гироскопической оси 11 то прецессиями (поворотами (ГДβ)17) в плоскости XOY, то нутациями (поворотами (ГДβ)16 - фиг.4, 17 и 24) в плоскости XOZ по пневмокомандам от угловой пневмомуфты (Мωк)18 на оси 9 поворотов сварочных клещей 10 при манипулировании нормалью N-N.
Части циклов
Единой для консольного и портального исполнения адаптивного робота система управления является для манипулирования частями рабочего органа в паузах между повторяющимися элементарными производственными операциями, например (здесь и далее), между точечными контактными электросварками отбортовок фланцевых соединений, а также при поперечных рабочих подачах, зависящих от фазового состояния осей гироскопа. Отличие в работе их систем управления касается жесткопрограммной части (пневмоблоки A3 в БС фиг.1, а также Б5', Б5.1 и Б5.2…3 и 4 фиг.18…22) при выводе рабочего органа из исходного к точке предварительного рабочего положения (ТПРП) поперечной подачей холостого хода рабочего органа, не зависящего от фазового состояния осей гироскопа.
Каждый цикл работы делится на два полуцикла - нечетный и четный, чтобы возвращать гибкие коммуникации из закрученного в незакрученное исходное состояние.
Каждый полуцикл управления состоит из пяти временных частей:
1-я часть - независимо от фазового состояния осей гироскопа быстрый (маршевый) холостой ход рабочего органа «вперед» из исходного положения к точке предварительного рабочего положения (ТПРП).
2-я часть - в зависимости от фазового состояния осей гироскопа «медленная» рабочая установочная поперечная подача сварочных клещей «вперед от (.) ТПРП к ребру свариваемого фланца по градиенту (направлению) суммарного вектора скорости рабочего органа с отработкой предотвращения вероятности столкновения технологического инструмента (штокового или скобового электрода сварочных клещей) с кромкой ребра свариваемого фланца из-за «плавания» точки окончания-начала сварки последующего изделия относительно предыдущего в поточном производстве. Выполнение первой сварочной точки (см. табл.5).
3-я часть - технологическая «медленная» продольная подача, зависящая от фазового состояния осей гироскопа в паузах между сварками и манипуляции слежения - поисковые ходы, «назад-вперед», повороты осей гироскопа при встрече с выпуклостями и впадинами отслеживаемой ленты отбортовки свариваемого фланца и дополнительное раскрытие зазора между электродами, а также при смене координатной оси декартова пространства. В поисковых ходах «назад» и - быстрый (маршевый) холостой ход рабочего органа с соблюдением фазового градиента суммарного вектора скорости (см. табл.6).
4-я часть - по окончании слежения быстрая рабочая (маршевая) поперечная подача рабочего органа «назад» от кромки отбортовки сваренного фланца к (.) ТПРП по градиенту маршевого суммарного вектора скорости в зависимости от фазового состояния осей гироскопа (см. табл.5 и 6).
5-я часть - независимо от фазового состояния осей гироскопа быстрый (маршевый) холостой ход рабочего органа «назад» от (-) ТПРП к исходному положению.
Работа системы управления при выполнении полуциклов жесткопрограммным пневмоблоком Б5 (БС фиг.1, 18 и 19).
Первая временная часть полуцикла работы робота консольного исполнения
С появлением в пространстве робота изделия (которое вызвано, как показано на фиг.19, путевым пневмотриггером 5/2ВК2П через пневмоэлектродатчик ПЭД3 (см. БС фиг.1 и 18) срабатывает путевой пневмодатчик 3/2 BK1 С его выхода через пневмотриггер П6 и ИЛИ63 проходит пневмокоманда 176 «начало». При этом переключаются воздухораспределители Р1-Р2 пневмоблока Р1…Р4 (из соображений производственной безопасности способного останавливать ПЦ1 в некотором среднем положении, если оператору вздумается опасно снять руку с пульта). Сжатый воздух с линии 88 проходит по стрелке слева вверх направо воздухораспределителя Р1 (НЕ) в левую полость (ПЦ1)5. Его правая полость соединена с атмосферой через Р2 (стрелка - слева вниз направо).
ПЦ1 делает ход влево. При этом пневмотриггер 5/2ВК2П остается в правом исходном (П-память) положении. В конце хода (ПЦ1)5 тележка 1 переключает влево ВК3 (пунктирная стрелка). Пневмосигнал с его выхода переключает вправо дифференциальный воздухораспределитель ДПР4 и влево пневмотриггер П6. П6 заблокировал пневмосигнал с выхода ВК1 и соединил через ИЛИ63 линию 176 «начало» с атмосферой. Р1 и Р2 возвращаются в исходное положение. (ПЦ1)5 оказывается запертым на пробках в Р1 и Р4. Обе руки можно безопасно снять с рабочего пульта РП. К этому моменту команда от ВК3 переключила дифференциальный пневмораспределитель ДПР4 вправо. Пневмоцилиндр-фиксатор (ПЦ2)7 делает ход вперед, отпускает исходно прижатый ВК4, который соединяет линию 177 через ИЛИ62 с атмосферой. В конце хода ПЦ2 переключает ВК5. Команда 183 с его выхода отключает память ВК2П, и он делает ход влево, соединяя линию управления ПЭД3 и левый торец П6 с атмосферой. Одновременно пневмокоманда 183 проходит в пневмоблок Цк (фиг.8) на включение Рпит1. Трехкоординатная тележка 1 заняла положение ТПРП в готовности к установочной рабочей поперечной подаче (2-я временная часть полуцикла).
Пятая временная часть полуцикла
По окончании четвертой временной части - сварка фланцевого соединения с участием счетного блока СБ (фиг.26) - последний выдает пневмокоманду 204'', которая через ИЛИ61 пневмокомандой 143 переключает в исходное положение ДПР4, несмотря на подпор сжатого воздуха с малого торца от прижатого ВК3. Пневмоцилиндр (ПЦ2)7 отводит фиксатор назад. ВК5 возвращается пружиной в исходное положение, снимая подпор сжатого воздуха с правого торца ВК2П. По окончании хода назад (ПЦ2)7 вновь переключает ВК4, от которого проходит пневмокоманда 177 «окончание полуцикла» через прижатый ВК4 и ИЛИ62 на переключение Р3-Р4 четырехклапанного воздухораспределителя Р1…Р4. Сжатый воздух через Р4 по стрелке справа вверх налево проходит через Р2 (НЕ) в правую полость пневмоцилиндра (ПЦ1)5. Платформа с трехкоординатной тележкой 1 идет вправо от ТПРП в исходное положение и в конце хода (ПЦ1)5 переключает вправо ВК2П (в исходное положение). От правого выхода ВК2П к ПЭД3 проходит пневмокоманда вызова очередного изделия на периферийном транспортере. Ранее пневмокоманда 143 «гидростоп» с выхода ИЛИ61 прошла к пневмоблоку Б1.1 (фиг.12) на отключение насоса ИН (фиг.25). Полуцикл окончен.
Отличия выполнения первой и пятой временных частей полуцикла жесткопрограммным пневмоблоком адаптивного робота портального исполнения
В качестве примера работы системы пневмогидравлического управления рассматривается выполнение операции точечной контактной электросварки секционированной боковины малотоннажного автобуса. Операция выполняется поочередно в двух фронтальных плоскостях: в плоскости XOZ (первая половина производственной операции) и в плоскости XOY (вторая половина операции). В первой половине пять переходов (фиг.30а): нечетных и четных разомкнутых фланцевых простых плоских швов АБОВГ, соединяющих поперечные изнаночные отбортовки переменной ширины панелей секций боковины (фиг.29а), и во второй половине операции (фиг.30б) четыре замкнутых фланцевых соединения с отбортовками постоянной ширины оконных проемов с каркасом боковины (условно по траектории П'Р'С''Т''' на фиг.29б и фиг.31).
Трехкоординатная тележка 1 имеет направляющие вдоль оси Х-Х декартова пространства, как и в роботе консольного исполнения (фиг.4 и 18), но направляющие Х-Х - не на платформе, а на портале 150 - и имеет гидропривод (ГДХ)2 с удвоителем хода (патент RU №2230243 С2) его поршня L=2X (X - ход поршня, см. фиг.20, a L - ход тележки 1), что обеспечивает сварку шва длиной примерно 2 м.
В отличие от адаптивного робота консольного исполнения робот портального исполнения снабжен сборочной тележкой 151 с ходами челночного типа вдоль оси у-у (фиг.30). Закатывают тележку 151 под портал вручную (при необходимости - отдельным приводом) слева направо после подсборки на ней и прихватки поперечных швов панелей секций двумя-тремя точками универсальной подвесной сварочной установкой, и… возвращают справа налево после вкладывания в сваренную облицовку каркаса боковины (после аналогичной ее прихватки к каркасу в 2-х - 4-х точках).
Первая временная часть полуцикла в плоскости XOZ, выполняемая роботом портального исполнения
Рабочий оператор переключает ручной воздухораспределитель РР1 (фиг.20). Пневмоцилиндр-фиксатор ПЦ6 делает ход вперед. ВК4' переключается пружиной в переднее положение. Линия 177 через ИЛИ66 соединяется с атмосферой, подготавливая переключение пневмотриггера П9 влево. ПЦ6 фиксирует сборочную тележку 151 по гнезду «XOZ» для работы во фронтальной плоскости XOZ и переключает путевой пневмодатчик ВК5'. От него через ИЛИ65 и блокировочный (переналадочный) пневмоклапан 2/2 БК проходит пневмокоманда 176 «начало», как и для робота консольного исполнения, к счетному пневмоблоку СБ (фиг.26) и параллельно к пневмоблоку Б1.1 (фиг.12).
В Б1.1 пневмосигнал 176 через НЕ5, ИЛИ23 раздваивается через П15 на включение ИН (фиг.25) и параллельно: через ИЛИ91 в виде пневмосигнала 78 к пневмогидроблоку Г1 и к пневмоблоку Б2.2 (к Е5 в В2 фиг.15).
В Б2.2 пневмосигнал 78 проходит через ИЛИ38, ИЛИ40 и НЕ 12 к ВЗ пневмоблока Б2.1 (фиг.14).
В Б2.1 пневмосигнал 78 через ИЛИ28 проходит в линию 147 (+z) к Б6 в Г1 (фиг.23).
В Г1 пневмогидроблок Б6, получив пневмосигнал +147 от Б2.2 и Б2.1, переключает влево пневмогидрораспределитель Гр2. Гидроцилиндр (ГДZ)3 (фиг.20 и 23) идет вниз (+Z в единой системе управления система координат перевернута плюсом вниз) с большой маршевой скоростью холостого хода, т.к. команда 78 от Б1.1 ранее переключила в пневмогидроблоке Б7 триггер ГБз1 (блок золотников 3/2×3) вправо, присоединив к входу среднего золотника через гидросопротивление Rм гидродавление Д от гидродатчика (cosγz)26 гидрорезольвера (Грзγ)33 через триггер 4/2 Гр5 (переключен исходно вправо в перекрестное положение) и напрямую через правый золотник гидроблока золотников ГБз2 (3/2×2) НЕ.
При этом гидродавление подключено ранее к линии Д от насоса ИН (фиг.25) с включением пневмораспределителя Рпит3 «гидро» пневмокомандой 176 (фиг.25) через П15 в Б1.1 и ИЛИ 82 в ИН (фиг.12 и 25).
В подблоке Б5.3 (фиг.21) гидроцилиндр ГДZ (не показан), пройдя расстояние «Ж» до точки ТПРП (предварительного рабочего положения), кулачком 185 переключает ВК6. Как и в роботе консольного исполнения, к Цк (фиг.8) проходит пневмокоманда 183 включения пневмопитания следящей системы переключением вправо воздухораспределителя Рпит1 через ИЛИ6. От линии Х.Х. (холостого хода) 88 через ПУ (фиг.28, тумблер Т5 переключен в рабочее положение) к линии 89 подключилось питание сжатым воздухом угловых пневмомуфт М (фиг.5) и пневмодатчиков блоков щупов Щ1 (фиг.10).
Окончилась первая временная часть нечетного полуцикла XOZ. Одновременно пневмокоманда 183 переключила пневмоклапан НЕ 12 в пневмоблоке Б2.2 (В2) на остановку гидроцилиндра ГДZ прерыванием пневмосигнала +147.
В пневмогидроблоке Б6 (Г1 фиг.23) гидрораспределитель Гр2 встал в нейтральное положение, а сам ГДZ оказался запертым гидрозамком Гз у точки ТПРП (фиг.21).
Первая временная часть полуцикла, в плоскости XOY выполняемая роботом портального исполнения, отличается началом работы системы управления. После возвращения сборочной тележки 151 под портал 150 справа налево рабочий-оператор переключает ручной воздухораспределитель РР2, и пневмоцилиндр-фиксатор ПЦ7 делает ход вперед. ВК24 переключается пружиной в переднее положение, и линия 177 через тот же пневмоклапан ИЛИ66 соединяется с атмосферой. ПЦ7 (фиг.20) фиксирует сборочную тележку 151 уже по гнезду «XOY», т.к. переналадочная кантовка коленвалом 58 оси 11 на 90° (на фиг.21) выводит сварочные клещи 10 в положение, далеко отстоящее вдоль оси у-у от положения для работы в плоскости XOZ. Одновременно переключается путевой пневмодатчик ВК25, от которого через те же ИЛИ65 и блокировочный клапан БК проходит в систему управления пневмокоманда 176 «начало», как и при работе во фронтальной плоскости XOZ. Далее система управления работает так же, но гидроцилиндр ГДZ, минуя отключенные от питания пневмодатчики ВК6 и ВК8 (фиг.21), кулачком 189 переключает путевой пневмотриггер ВК10П, который расположен существенно ниже пневмоклапана ВК8. От ВК10П пневмосигнал 141 проходит в пневмоблок Б2.2 уже к Е4(Х) (фиг.15).
В пневмоблоке Б2.2 пневмосигнал 141 проходит через ИЛИ41, ИЛИ42, через НЕ 13 в пневмоблок В3 (фиг.14) и через ИЛИ26 к Г1 (Б6 фиг.23) в линию 145 (минус у). Параллельно пневмокоманда 141 через ИЛИ34 переключает НЕ 12, прерывая пневмокоманду +147 (+z). (ГДZ)3 останавливается, т.к. Гр2 (фиг.23) встает на нейтраль, а ГДZ - на гидрозамок Гз. Одновременно пневмокоманда 145 переключает влево Гр1. Гидроцилиндр (ГДY)4 идет вправо (минус у на фиг.20 и 21).
В Б5.2 (фиг.20) кулачок 191 по пути РО вправо переключает ВК11, который выдаст пневмокоманду 193 «стоп» для (ГДУ)4, переключая НЕ13 в пневмоблоке В2 (фиг.15). В Б6 (Г1 фиг.23) Гр1 встает на нейтраль, а (ГДУ)4 - на гидрозамок Гз. Положение ТПРП достигнуто. Система управления готова к выполнению второй временной части полуцикла во фронтальной плоскости XOY.
Выполнение пятой временной части полуцикла пневмоблоком Б5.2 в плоскости XOZ
В момент окончания 4-й части полуцикла (табл.5, схема 8) гидроцилиндр (ГДZ)3 (фиг.21) маршевым быстрым доминантным ходом, зависящим от фазового состояния осей гироскопа, отводит вверх кулачок 185, и ВК6 пружиной возвращается вправо. Исчезает подпор сжатого воздуха с большого торца Рпит1 (через ИЛИ6 фиг.8). Затем по пути вверх (минус z) кулачок 186 переключает вправо ВК8 (показано на фиг.21). Пневмосигнал 184 через ИЛИ76 (фиг.8) переключает Рпит1 влево. Достигнута (·) ТПРП, отключено питание сжатым воздухом угловых пневмомуфт М (фиг.5) и пневмодатчиков Щ1 (фиг.10). Далее (независимо от фазового состояния осей гироскопа) гидропривод (ГДZ)3 заканчивает быстрый маршевый холостой ход и переключает ВК9. Через П9 (ранее был переключен влево пневмокомандой 207 на фиг.8 с выхода ИЛИ7) проходит пневмокоманда 143 «гидростоп», автоматически переключающая вправо ручной воздухораспределитель РР1. Пневмоцилиндр ПЦ6 отводит фиксатор от гнезда «XOZ» (снизу) сборочной тележки 151 (фиг.20) и возвращает в исходное положение ВК5'. В конце хода ПЦ6 переключает ВК4' (показано), и пневмосигнал 177 («возвращение» 177.1 на фиг.27б), преобразуясь в СБ в сигнал 202 «окончание нечетного полуцикла», дает цветовой и звуковой сигнал вызова рабочего-оператора для передвижки вправо под гироскопом тележки 151 на шаг между поперечными швами (или по окончании первой половины операции - вправо на сборку сваренной облицовки боковины с ее каркасом по пневмокоманде 162 через ИЛИ64, к входам которого подключены линии с выходов 126 и 127 путевых пневмоклапанов ВК2 и ВК3, контролирующих крайние положения трехкоординатной тележки 1 (окончания слежения в 3-й временной части полуцикла). Ранее тот же пневмосигнал 143 параллельно переключил вправо пневмотриггер П15 (фиг.12 вверху). На фиг.25 пневмоклапан Рпит3 «гидро» отключил пневмогидронасос ИН.
Выполнение пятой временной части полуцикла жесткопрограммным пневмоблоком Б5.2 в плоскости XOY
В момент окончания 4-й части полуцикла сварки оконных проемов в плоскости XOY (табл.6, схема 7) гидроцилиндр (ГДХ) быстрым маршевым длинным ходом, зависящим от фазового состояния осей гироскопа, отводит кулачок 191 (фиг.30) влево (+у). ВК11 возвращается пружиной в исходное положение (показано на фиг.20), снимая подпор сжатого воздуха с большого торца Рпит1 (фиг.8). По пути (+у) гидроцилиндр (ГДY)4 переключает кулачком 192 ВК12 (показано на фиг.20). Пневмосигнал 194 с выхода ВК12 переключает Рпит1 влево, отключая питание сжатым воздухом угловых пневмомуфт М (фиг.5) и пневмодатчиков Щ2 (фиг.11). Достигнуто положение ТПРП, и по пневмокоманде 162 «окончание слежения» (от СБ, ДБ2 пневмокоманда 204' «окончание замкнутого периметра» через ИЛИ64 - фиг.26 и 20) переключился влево пневмотриггер ВК10П. Одновременно пневмосигнал 194 с выхода ВК12 в пневмоблоке Е4 (Y) пневмоблока В2 (фиг.15 Б2.2) через ИЛИ43 и ИЛИ44 в пневмоблок В3 (фиг.14) к ИЛИ26, выдавая пневмокоманду 144 (+у) к Г1 на быстрый маршевый ход (ГДY)4 от (·) ТПРП в исходное положение сварочных клещей в сваренном оконном проеме боковины. Достигнув исходного положения, (ГДY)4 тыльной стороной кулачка 191 переключил ВК13. С выхода ВК13 пневмокоманда 184' проходит к Б2.2 (фиг.15 E5(Z)) и через ИЛИ78, ИЛИ37 и ИЛИ39 поступает в В3 (фиг.14), где через ИЛИ27, преобразуясь в пневмосигнал 146 (минус Z), идет в Б6 (Г1, фиг.23) на быстрый маршевый отвод вверх (система координат минусом Z вверх) из оконного проема гироскопа гидроцилиндром (ГДZ)3. Далее, как при выполнении пятой временной части полуцикла при работе во фронтальной плоскости XOZ, но с автоматическим отключением пневмокомандой 143 воздухораспределителя РР2 вправо в исходное положение.
Вторая, третья и четвертая временные части циклов
Выполнение 2-й (по пневмосигналу 76), 3-й (по пневмосигналу 77) и 4-й (по пневмосигналу 78 от пневмоблока Б1.1 фиг.12) временных частей полуциклов показано в табличной форме: табл.5 по простому плоскому контуру в плоскости XOZ и табл.6 по глобулярному контуру в плоскости XOY. В последнем случае угловые (фазовые) зоны переключений пневмомуфт М показаны на фиг.31. Проследить за переключением пневмо- и гидроэлементов принципиальных схем системы управления удобнее, показав пневмо- и гидропотоки в виде таких же стрелок, как в условных стандартных обозначениях пневмо- и гидроаппаратов, но для упрощения опустив (стерев) прямоугольники золотников и сохранив механические связи в их блоках в виде знаков равенства, а сигналы пневмоуправления - в виде горизонтальных стрелок.
Каждой табличной схеме векторных градиентов (в графе 2) предпосланы условия: фаза главной оси 11 «чистого вращениям гироскопа (угол γ), справа от пневмомуфты М - номер линии, в которую поступает сжатый воздух согласно таблице 4, над обозначением ходов (линий - вертикальных перекрестных и наклонных) золотников клапанов и распределителей указано направление их переключения - вправо (право), влево (лево). Таблица 6 сложнее таблицы 5, т.к. в ней показано соучастие элементов управления двумя и тремя линейными гидроприводами. Поэтому источник исходного пневмосигнала выделен жирным прямоугольником.
Переходные процессы с участием поворотных гидроприводов при перемене координаты декартова пространства, как и поисковые ходы «назад-вперед», не отражены в таблицах 5 и 6. О них сказано ниже.
Реакция системы управления на пуск в работу, когда в пространстве робота изделия нет
Жесткопрограммный пневмоблок Б5.1 содержит блокировочные пневмоклапаны ДП4 и ДП5 с функцией «изделия нет» (фиг.19), не показанные из-за недостатка места на фиг.20 в пневмоблоке Б5.2, но они предусмотрены единой системой пневмогидравлического управления, как и для робота консольного исполнения.
При случайном пуске (или наладочном) дифференциальные пневмоклапаны ДП4 и ДП5 срабатывают, как в первой временной части обычного полуцикла, если при холостом ходе к (·) ТПРП установочная поперечная подача, не встретив отбортовки фланцевого соединения изделия, продолжается до упора поршня доминантного гидроцилиндра в крышку. Именно в этот момент от ВК8 (или ВК10) проходит пневмокоманда на переключение ДП4 (или ДП5) вправо. От него пневмосигнал проходит через ИЛИ58 (ИЛИ56) и через ИЛИ57 в линию 162 к пневмоблоку Б1.1 (фиг.12), где пневмосигнал 162 означает «быстро назад» как «окончание слежения».
Далее, как в пятой временной части «полуцикла», автоматически происходят логические операции по возвращению трехкоординатной тележки и ее гидроприводов в исходное положение.
Автоматическая переналадка системы управления для поочередной работы в двух фронтальных плоскостях
В рассмотренном примере сварки боковины малотоннажного автобуса выполнение двух половин одной технологической операции производится поочередно то во фронтальной плоскости XOZ, то - в XOY. Автоматическая переналадка системы управления на другую фронтальную плоскость происходит следующим образом.
По окончании сварки поперечных швов боковины в плоскости XOZ сборочную тележку 151 (фиг.20 и 30) выкатывают вправо. Попутно кулачок 174 переключает путевой пневмотриггер ВК26П, выдающий пневмосигнал 163, который преобразуется пневмотриггером П10 в пневмосигнал 170. Он проходит для питания сжатым воздухом ВК20…ВК23, к ИН (на включение Рпит3 «гидро» для обеспечения гидродавлением наладочных операций), к Б1.2 (Е1 фиг.13) и к Цщ (фиг.9).
Автоматическая смена блоков щупов Щ1 в плоскости XOZ на Щ2 в плоскости XOY
В Цщ (фиг.9) пневмосигнал 170' (169 при возвращении с XOY на XOZ) переключает вправо с малого торца ДП3 (большой торец соединен с атмосферой через ДА1). Сжатый воздух (88) через ИЛИ4 дифференциальный воздухораспределитель ДПР3 переключает вправо. Пневмоцилиндр (ПЦ5)40 выводит фиксатор из гнезда Щ1 (PO фиг.7). Пневмоклапан НЕ3 переключается пружиной вперед. Пневмосигнал от НЕ3 переключает влево ДА2, соединяя торец ДА1 с выходом ИЛИ3 «отвод». В конце хода (ПЦ5)40 переключает оба путевых пневмоклапана ВК14 и ВК15. Питание 88 сжатым воздухом выполнено через пневмотриггер 5/2 П2, ранее переключенный пневмокомандой 165' вправо (от Рпит4 в Б5.2 фиг.20). Сжатый воздух (88) через ВК15 проходит к правому торцу ДПР1 (Щ1) и переключает его влево, несмотря на подпор от ВК28, с малого торца. (ПЦ3)38 начинает ход назад от сварочных клещей, отпуская ВК16 и ВК16'. Пневмосигнал от них проходит к правому торцу ИЛИ5 «подвод», и через него с малого торца ДПР3 снимается подпор сжатого воздуха от ВК16 и ВК16' (соединенных по схеме «И»). В конце хода (ПЦ3)38 переключает ВК17 и ВК17'. Сжатый воздух (88) через ВК15 проходит к правому торцу ДПР2 (Щ2). Левый большой торец через прижатый ВК14 и через П2 соединен с атмосферой. Одновременно пневмосигнал от ВК17 и ВК17' проходит через ИЛИ3 (снизу) к переключенному пневмоклапаном НЕ3 влево пневмоклапану ДА2 и через него переключает ДА1 влево, соединяя большой торец ДП3 с выходом ИЛИ5 «подвод». ДПР2 переключается влево. Начинает ход (ПЦ4)39. Снимается подпор от ВК28 и ВК28' с верхнего входа ИЛИ3 «отвод» и с малого торца ДПР1. От П2 через прижатый ВК15 и ДП1 проходит пневмокоманда его переключения влево. В конце хода (ПЦ4)39 переключает ВК29 и ВК29', от которых пневмосигнал через левый вход ИЛИ5 «подвод» проходит к малому торцу ДПР3 и параллельно - к большому торцу ДП3, переключает его, несмотря на подпор с малого торца пневмокоманды 170'. Большой торец ДПР3 через ИЛИ4 и ДП3 соединяется с атмосферой. ДПР3 переключается в исходное положение. (ПЦ5)40 фиксирует положение Щ2 у клещей и переключает НЕ3. От НЕ3 параллельно отведена линия 200 к Б5.4 (фиг.22). Торец управления ДА2 соединяется с атмосферой, и пружина возвращает ДА2 вправо. Отключается подпор ВК17 через ИЛИ3. Возвращается пружиной в исходное положение ДА1, соединяя большой торец ДП3 с атмосферой для новой автоматической переналадки. К этому времени оказывается снятым подпор 170' переключившимся в исходное положение путевым пневмотриггером ВК26П.
Автоматический отвод рабочего органа к предварительному положению (к ВК7) для работы в плоскости XOY по окончании работы в плоскости XOZ
В Б5.2 (фиг.20) пневмосигнал 170 переключил ИЛИ71 в Е10 на наладочное питание сжатым воздухом путевых пневмодатчиков ВК2 и ВК3 через ИЛИ73 и напрямую пневмодатчика ВК7 (см. пунктирные наладочные связи на фиг.20). Возможны два случая возвращения рабочего органа к переналадочному пневмоклапану 5/2 ВК7: а) длинный перегон рабочего органа в сторону +Х от ВК2, б) короткий ход от ВК3 в сторону минус X.
Случай длинного перегона рабочего органа к ВК7
Пневмосигнал 126 от ВК2 (фиг.20) через ИЛИ68 и ИЛИ64 в виде пневмокоманды 162 к Б1.1 (фиг.12) проходит к Б2.2 (фиг.15). В Б2.2 пневмосигнал 126 переключает вправо пневмотриггер 5/2 П8. Сжатый воздух проходит через П8 по серединной стрелке слева вверх направо через НЕ 15, ИЛИ36, ИЛИ79, НЕ16 в В3 (Б2.1 фиг.14) и к Г1 (+Х) (пневмосигнал +149 фиг.23).
В Г1 (Б6) пневмосигнал +149 переключает влево Гр3. (ГДХ) идет вправо (фиг.20 и 23). Скорость холостого хода определена пневмокомандой 78 по окончании слежения (162 в Б5.2 - фиг.20 и Б1.1 - фиг.12), переключившей ГБз1 вправо (Б7 в Г1 фиг.23). Вход Д Гр3(Х) подключен через правый золотник Гбз1 от Rм (быстрой маршевой скорости), а также соединен с большим косинусным гидропотоком от [cosγz(y)]26 (с рокировкой Z на Х по табл.2) через Гр5, переключенный от П10 в Б4 (фиг.17) пневмокомандой 153 «продольно» влево, и Гр4, что означает максимально возможную быструю переналадочную скорость холостого хода.
Кулачок 190, повстречавшись с роликом ВК7, переключает его. К этому моменту от нижнего клапана в пневмоблоке Е10 пневмокоманда 170 переключила нижний пневмоклапан пневмоблока ИЛИ71, и ВК7 получил питание сжатым воздухом 88. С выхода ВК7 проходит переналадочная пневмокоманда в линию 179 к пневмоблоку Б2.2, отключая НЕ 15 и НЕ 16 для прерывания пневмосигнала +149·(х). В Г1 (Б6) Гр3 встает на нейтраль, а (ГДХ)2 - на гидрозамок Гз (фиг.23).
Случай короткого хода рабочего органа к ВК7
Пневмосигнал 127 от ВК3 переключает в Б2.2 П8 влево (показано на фиг.15). Сжатый воздух проходит через П8, НЕ14, ИЛИ35 в линию 148 (минус X) к ВК3 (фиг. 14) и через ИЛИ30 к Г1 (Б6 фиг.23).
В Г1 пневмокоманда 148 (минус X) переключает Гр3 вправо гидроцилиндр (ГДХ)3 делает ход влево к ВК7. Кулачок 190 опять переключает ВК7. Пневмосигнал 179, как и в предыдущем случае, останавливает гидроцилндр (ГДХ)3.
Переналадочное автоматическое доворачивание главной гироскопической оси 11 «чистого вращения» и оси 12 прецессий в предварительное рабочее положение нормали N-N технологического инструмента для работы во фронтальной плоскости XOY
Положение ВК7 (фиг.20 и 21) выбрано так, чтобы поворот +β не требовался, но возможны дизайнерские варианты, когда такой идентичности угла β и для XOZ, и для XOY не окажется. Для этого случая предусмотрен кулачок 171 на оси 12 прецессий (фиг.4). В одну сторону он переключает ВК21, а в обратную - ВК20 (фиг.20). В первом случае ВК21 выдает пневмокоманду 158 (+β), а во втором -157 минус β (см. Б5.4 фиг.22). Та же переналадочная пневмокоманда 170 от ВК26П (фиг.20) поступает в пневмоблок Е8 пневмоблока Б4 на поворот +β гидроприводом (ГДβ) 17 в пневмогидроблок Г2 (фиг.24) для переналадки с XOZ на XOY, а в обратную сторону по пневмокоманде 169 от ВК27П на поворот минус β. Остановка поворота ГДβ выполняется пневмокомандой 157 или 158 переключением ВК20 и ВК21 кулачком 171.
Главную гироскопическую ось 11 необходимо возвращать в новое исходное положение для переналадки из фронтальной плоскости XOZ к XOY после остановки трехкоординатной тележки 1 слева (у ВК2) или справа (у ВК3), т.к. в первом случае «флюгер» сварочных клещей оказывается в отрицательной фазе (-γ), а во втором - в положительной (+γ - см. фиг.29а - кривую АБОВГ). В пневмоблоке Е1 (Б1.2 фиг.13) отрабатываются оба случая: в первом нужен доворот +γ, а во втором (-γ).
Одна и та же пневмокоманда 170 от ВК26П (фиг.20) переключает оба пневмоклапана И6 и И7 в Б1.2 (фиг.13). Пневмосигнал +γ от И7 поступает, когда прижат ВК2 (команда 126), через НЕ9 в Б1.1 к ИЛИ16 и через ИЛИ15 к пневмогидроблоку Г2 (фиг.24)+99. В гидроблоке Г2 по пневмокоманде +99 Гр15 переключается вправо. (ГДγ)15 поворачивается против часовой стрелки +γ. А поворот минус γ выполняется, когда помимо пневмосигнала 170, переключившего оба пневмоклапана И6 и И7, на входе в И6 появляется пневмосигнал 127 от ВК3 (фиг.20). Пневмосигнал с выхода И6 сразу проходит через ИЛИ 14 в Б1.1 (фиг.12) в виде пневмосигнала (-100) к Г2, заставляя (ГДγ)15 повернуться по часовой стрелке (минус γ). Остановка поворота ГДγ происходит переключением ВК23. По пневмокоманде 159 от ВК23, переключенного кулачком 172), прерывается и тот и другой пневмосигнал поворота срабатыванием НЕ9 и НЕ10. «Флюгер» занял требуемое фазовое положение для работы во фронтальной плоскости XOY (см. фиг.22 Б5.4).
Система согласования задержки поворота коленвала 58 на 90° для ожидания окончания выполнения переналадочных операций в семи адресах системы управления
Разновременность окончания переналадочных манипуляций, приведенных выше, требует согласованной задержки поворота коленвала 58 (фиг.4 и 20) на 90° гидроприводом (ГДα')59. Этой цели служит пневмоблок Б5.4 (фиг.22). Он состоит из двух подблоков Е9 поворота коленвала 58 из вертикального в горизонтальное положение и Е11 - наоборот - возвращения из горизонтального в вертикальное положение. Когда от И20 появляется пневмокоманда 205 от Е9 (фиг.22), она проходит в пневмогидроблок Г2 (фиг.24), где переключает пневмогидрораспределитель 4/3 Гр18 вправо. От его входа Д по стрелке вверх направо проходит гидропоток от ИН и поворачивает (ГДα')59 в направлении +α' - против часовой стрелки. Кулачок 156 уходит из-под пневмодатчика ВК18, и пружина сдвигает его вперед. Левый торец пневмотриггера Рпит4 соединяется с атмосферой (фиг.20).
По окончании поворота на 90° кулачок 156 переключает ВК19, с выхода которого проходит пневмокоманда 166, переключающая влево пневмотриггер 5/2 Рпит4. От его левого выхода сжатый воздух проходит в 7 адресов для начала работы во фронтальной плоскости XOY. Одновременно пневмокоманда 166' переключила в верхнее положение пневмотриггер ВК26П (фиг.20). Разрешение на поворот коленвала 58 на 90° получено за счет согласованной его задержки.
Это - и ожидание переключения ВК23 поворотом ±γ (см. Е1 в Б1.2 фиг.13) кулачка 172 на оси 11 гироскопа (фиг.4) и выдачи пневмосигнала 159 к нормально закрытой линии И 16, и согласованное ожидание переключения ВК21 поворотом +β (см. Е8 в Б4 фиг.17) кулачка 171 на оси 12 гироскопа и выдачи пневмосигнала 158 в линию переключения того же И 16. Такое же согласованное ожидание выполняется пневмоклапаном И 17: и пневмосигнала 179 его переключения ±Х от кулачка 190 на трехкоординатной тележке пневмоклапана ВК7 (фиг.20), и подключение к линии переключения И 17 с линии 200', исходно соединенной с атмосферой через пневмотриггер 3/2 П11 (который помнит команду справа с выхода ИЛИ95 от предыдущего поворота ±α'). Во время цикла смены щупов (фиг.9) пневмоцилиндр-фиксатор (ПЦ5) 40 отведен от путевого пневмоклапана НЕ3, и сжатый воздух по линии 200 параллельно переключает вправо П11 и НЕ 17 (фиг.22), но в линию 200' команда не может пройти, т.к. она сразу через НЕ 17 соединилась с атмосферой. По окончании цикла смены щупов цилиндр-фиксатор (ПЦ5) 40 вновь переключает НЕ3, снимая подпор сжатого воздуха в линию 200. Пружина возвращает влево НЕ 17, и сжатый воздух по линии 200' через сдвинутый вправо триггер П11 переключает И17.
Выходы И16 и И17 подключены к входам И20, с выхода которого через ИЛИ75 и выдается пневмокоманда 205, разрешающая поворот +α' на 90°. Одновременно через пневмоклапан ИЛИ95 эта команда проходит к правому торцу П11, возвращая его в исходное положение.
Задержка возвращения к фронтальной плоскости XOZ обусловлена необходимостью ожидания окончания манипуляций поворота (-)β оси 12 согласованно с поворотом +γ оси 11 (пневмосигналы 157 от ВК20 на оси 12 и 160 от ВК22 на оси 11 и 160 на входы И 18 в пневмоблоке Е11 того же блока Б5.4 на фиг.22), а также ожидания замыкания «круга» обхода рабочим органом последнего оконного проема. Повторение пневмосигналов 179 от ВК7 в полуциклах сварки оконных проемов к нормально закрытому входу И 19 не влияет на состояние его выхода, но с появлением пневмосигнала 200' через П11 (см. выше) с выхода И 19 проходит пневмосигнал к нормально закрытому входу пневмоклапана И21, ожидающего пневмосигнал готовности от И 18 к торцу переключения И21. Разрешение на поворот возвращения коленвала 58 в плоскость XOZ выдается с выхода И21 через ИЛИ7 в виде пневмокоманды 206 к пневмогидроблоку Г2 (фиг.24), которая переключает Гр18 влево. Гидропривод (ГДα')59 делает возвратный поворот коленвала 58 по часовой стрелке (-α'). Окончание поворота совпадает с переключением кулачком 156. на оси 58 коленвала ВК18. От ВК18 проходит пневмосигнал 165, возвращающий пневмотригтер Рпит4 вправо (показано на фиг.20). Пневмосигнал 165' отключает память ВК27П и верхний пневмоклапан подблока Е10 в ИЛИ71 пружиной отводится влево, соединяя с атмосферой выход 179 в ВК7 (по пунктирной линии питания) в нижнем пневмоклапане ИЛИ71 в Е10. Следовательно, в гидроблоке Г2 (фиг.24) Гр18 встает на нейтраль, а (ГДα')59 - на гидрозамок Гз.
Автоматическая переналадка режима сварки
По окончании поворота +α' и переключении вправо Рпит4 (фиг.20) пневмосигнал 166' в пневмоблоке Цк (фиг.8) переключает П1 вправо (работа в плоскости XOY). С его выходом соединяется ресивер РС3, настроенный редукционным клапаном КР2 на повышенное усилие от силового пневмопоршня, т.к. толщина листа каркаса боковины существенно больше отбортовки оконных проемов секционированных панелей боковины. Этот же пневмосигнал 166' в пневмоблоке Б1.2 (фиг.13) переключает вправо пневмотриггер 4/2 П6 (подблока Е3 фиг.13б). С левого выхода П6 пневмосигнал через задержку включения в пневморегуляторе скорости ПРС2 переключает пневмоэлектродатчик ПЭД2, от которого, как от кнопки сварщика универсальной подвесной сварочной установки, проходит (по паре пунктирных линий на фиг.8) электрический сигнал на включение РВ2 - обычного электронного реле времени сварочной установки в блоке таймеров энергетического блока БС (фиг.1), которое настроено на сварку более толстого пакета листов каркаса и фланца оконного проема, чем РВ1. Обратное переключение П6 пневмокомандой 165' от Рпит4 (фиг.20) автоматически переключает систему управления на работу во фронтальной плоскости XOZ (показано на фиг.12 и 13).
Ручная (полуавтоматическая) переналадка и сервисное обслуживание РО
Перед началом работы с новой серией изделий наладчик пневмокнопками на наладочном пульте ПУ медленно (см. положение пневмотумблера Т3 фиг.28) подводит рабочий орган к месту начала сварки, поворачивает нормаль N-N сварочных клещей (фиг.4) перпендикулярно к касательной глобулярного волнового изгиба ленты отбортовки и, убедившись в примерно правильном положении технологического инструмента, быстро отводит рабочий орган в исходное положение. Благодаря наличию щупов робот сам точно устанавливает нормаль N-N перпендикулярно касательной волнового изгиба ленты отбортовки в режиме «автомат» (пневмотумблер Т1).
Когда окончена сварка данной серии изделий, наладчик заново полуавтоматически повторяет наладочные операции, в т.ч. меняет настройку РВ1 и РВ2 на новую серию изделий. Последнее необязательно, если вместо двух РВ система управления в энергетическом блоке СБ снабжена экстремальным самонастраивающимся прибором режима сварки (что необходимо при сварке листов из легированной стали).
Для выполнения проб сварки на образцах и ручного подбора режимов сварки (а также ручной заточки и поправки вылета электродов) необходимо отвести блоки щупов от «флюгера»-клещей. Этот отвод выполняется простым переключением пневмотумблера Т7 (фиг.9 и 28), вынесенного на рабочий орган из пневмопульта ПУ. В положении «наладка» (тумблер Т1) сжатый воздух от линии 88 отключается, и производится питание сжатым воздухом от Рпит2 по линии 91 от ПУ. Через пневмоклапан ИЛИ4 (фиг.9) переключается вправо ДПР3. Пневмоцилиндр (ПЦ5)40 отводит фиксатор. Пневмоклапан НЕ3 «отвод» выдает пневмосигнал 200 (к Б5.4 фиг 22) и параллельно на переключение ДА2, что не вносит изменений в логику переналадки. В конце хода (ПЦ5)40 переключает пару путевых пневмоклапанов ВК14 и ВК15. Положение пневмотриггера П2 зависит от фронтальности работы робота, при которой сварочные клещи прикрыты одной парой блоков щупов: или Щ1, или Щ2. Поэтому от ВК14 или ВК15 пневмокоманда на отвод только одного из блоков щупов поступает либо к ДПР1, либо к ДПР2. Когда операции по сервисному обслуживанию сварочных клещей выполнены, наладчик переключает пневмотумблер Т1 и Т7 в положение «автомат», и та пара блоков щупов, которая прикрывала доступ к сварочным клещам, возвращается в прежнее рабочее положение.
Отработка детерминированных (дизайнерских) и вероятностных (случайных) геометрических возмущений
К геометрическим возмущениям, влияющим на работу адаптивного робота, относятся детерминированные - дизайнерские - постоянные отклонения траектории слежения от прямых линий по уклону и без него в декартово пространство, о которых системе адаптивного управления заранее ничего не известно, а случайные (вероятностные) отклонения технологического свойства - это погрешности в изготовлении и базировании изделия по технологическим переделам и постам поточной линии, а также вероятностные синусно-косинусные повороты золотников гидрорезольверов следящей системы.
Отработка детерминированных геометрических возмущений
Отработка детерминированных возмущений сопряжена с работой рычагов и стержней тактильных щупов блоков Щ1 и Щ2 (фиг.10 и 11), воздействующих на пневмодатчики 3/2 (по пять штук в каждом из пары блоков щупов). Около «флюгера»-клещей с двух сторон смонтирована пневмосистема Цщ автоматического отвода одного из двух пар блоков щупов: или Щ1, или Щ2.
Реакции на возмущения во всех случаях дизайнерских поворотов и уклонов ленточной отслеживаемой поверхности и ребра отбортовки фланцевого соединения сводится к двум возможным альтернативам: при ходе рабочего органа с подъемом «на горку» или при спуске «с горки».
Подъем «на горку»
Встреча с подъемом траектории («горка» в пространстве с широтными и меридиональными подачами с лицевой и изнаночной стороны фланцевого соединения понятие условное - как положительная или отрицательная амплитуда изгиба траектории независимо от пространственного дизайнерского положения «горки») отрабатывается следующим образом.
В блоке щупов и пневмоклапанов Щ1 (фиг.10) при встрече с подъемом «на горку» подпружиненные рычаги упоров с коленчатыми валиками подгибают «коленки» с грибовидными роликами-щупами (фиг.10 а и б), и кулачки коленчатых валиков нажимают на штоки пневмодатчиков V (в нечетном полуцикле) или VI (в четном полуцикле). При этом пневмосигнал 105 (или 106) в пневмоблоке Б1.1 (фиг.12) с одновременным поворотом главной гироскопической оси 11 на угол минус 100 (по часовой стрелке), т.к. сигнал 105 параллельно прошел через НЕ6, ИЛИ 10 (фиг.12), по стрелке справа вверх налево через П4, через ИЛИ 11 и ИЛИ 14) к Г2 (фиг.24) в виде пневмокоманды минус 100 на поворот оси 11 по часовой стрелке. Этот ход «быстро назад» с одновременным поворотом (-)γ длится доли секунды, пока не окажутся исходно прижатыми штоки пневмодатчиков III и IV. От них в Б1.1 проходят пневмосигналы 103 и 104 к пневмоклапану И2, выдающему пневмокоманду 76 «поперечно вперед медленно». Если при этом ходе от щупов 1 и II проходят одновременно пневмосигналы 101 и 102, то И1 выдает пневмокоманду на сварку следующей точки (через НЕ4, ИЛИ13 и П3). Если же нет, то рассогласование щупов 1 и II опять заставляет сделать еще один поворот в сторону «провалившегося» щупа (как при ходе «с горки» - см. ниже) и имеет место очередной поиск «назад-вперед».
В отличие от блока щупов Щ1 в блоке Щ2 (фиг.11) при ходе «на горку» срабатывают предохранительные щупы - 73 в нечетном и 74 в четном полуцикле. При этом рычаг 72 (или 75) переключает пневмоклапан V (или VI - в четном полуцикле), а далее все происходит так же, как и в случае с блоком Щ1.
Выходы из угла биссектрисы поисковых поворотов главной гироскопической оси
При контурных изгибах отслеживаемой отбортовки «на ребро» работа предохранительных щупов в блоках Щ2 при ходе рабочего органа «на горку» зависит от встречи идущего вперед и предохранительного щупа-«усика» (73 или 74 на фиг.11) с изгибом ребра ленты отбортовки фланца. Случайно может сказаться, что и передний 73 и сзади идущий щуп-«усик» 74 (при ходе «вперед» после отвода «назад») одновременно выдадут пневмосигналы 105 и 106 к пятому пневмоклапану И5 пневмоблока Б1.1 (фиг.12), формирующему пневмосигнал «биссектриса», подключенный к входу пневмотриггера 5/2 П5, как и П4, управляемому с торцов пневмокомандами 201 «нечет» и 203 «чет». Выходы пневмоклапана П5 подключены к линиям управления НЕ6 и НЕ7, нормально открытые линии которых пневмосигналы 105 и 106 «на горку» через ИЛИ9 и ИЛИ10 направляют в линию +99 или (-)100 на поворот ±Δγ в сторону своего полуцикла слежения. Параллельно с выходов НЕ6 и НЕ7 пневмосигналы 105 и 106 через ИЛИ17…ИЛИ22 формируют пневмосигнал «быстро назад».
Встреча с изнаночной стороны фланца или панели изделия с базирующей оснасткой
Случай встречи с базирующей оснасткой с изнаночной стороны изделия воспринимается в пневмоблоке Б3 (фиг.16) как «впадина изделия», для обхода которой от изнаночного щупа IX (или X) с линией 109 или 110 (фиг.11) через ИЛИ87 к пневмоблоку Цк (фиг.8) проходит пневмосигнал 82 (или 83) и одновременно через ИЛИ89 или ИЛИ90 к гидроблоку Г2 (к Гр14 фиг.24) проходит пневмокоманда 98 или 97 на поворот сварочных клещей 10 вокруг оси 9, как в ожидании впадины дизайнерского «перелома» панели, подчеркивающего устремленность автомобиля вперед. В пневмоблоке Цк (фиг.8) пневмосигнал 82 переключает пневмораспределитель НЕ2 (3/2), который соединяет с атмосферой левую полость сервисного пневмоцилиндра предсжатия, и скоба 10 с электродом 36 вместе с вторым (нижним) поршнем отойдет «вниз» под оснастку. Поворот же оси 9 (ωк) при возвращении скобового электрода 36 компенсируется системой рассогласования щупов 71 и 71' (фиг.11).
Спуск «с горки»
При следящем спуске «с горки» впереди идущий щуп (фиг.10 и 11) «проваливается» с отключением пневмодатчика 1 в нечетном полуцикле, а пневмодатчик II, идущий сзади плоскости «флюгера»-клещей, остается включенным. Налицо диагональное рассогласование: скоба щупа, «провалившегося» вперед, и переключает пневмодатчик III. Пневмоклапан И4 (фиг.12) выполняет конъюнкцию пневмосигналов 102 и 103 и выдает через ИЛИ 18, 19, 21 и 22 пневмокоманду 78 «быстро назад». Одновременно пневмокоманда 78 проходит параллельно через ИЛИ 10 по стрелке справа вверх налево в П4 через ИЛИ 11 и ИЛИ 14 в линию минус 100 (фиг.12) к пневмогидроблоку Г2. Пневмокоманда минус 100 в Г2 (фиг.24) переключает Гр15 влево. Гидродвигатель (ГДγ)15 поворачивает ось 11 гироскопа по часовой стрелке минус Δγ в сторону «провалившегося» щупа. Происходит это во время быстрого холостого хода «назад» за доли секунды. Рабочий орган отходит быстро назад по пневмокоманде 78, как показано в схеме 4 табл.5: доминантно вверх отводятся сварочные клещи гидроцилиндром ГДZ (фиг.4 и 23) по пневмокоманде (-)146 с участием дополнительного гидроцилиндра ГДХ (минус X). При этом в пневмогидроблоке Г1 (фиг.23) пневмокоманда (-)146 переключила в Б6 гидрораспределитель Гр2 вправо, и одновременно пневмокоманда (-)148 вправо переключила Гр3. Суммарный вектор скорости рабочего органа складывается в прямоугольной векторной сумме, образуемой синусно-косинусным соотношением (cosγz)26 доминантной скорости и (sinγx)25 дополнительной скорости в гидрорезольвере (Грзγ)33 (фиг.23). Гидропотоки от гидродатчиков 25 и 26 проходят через гидротриггер Гр5 перекрестно (переключен вправо пневмокомандой 152 «поперечно» от пневмоблока Б4 (фиг.17) напрямую через гидрораспределители НЕ (правый золотник в ГБз2 (3/2×2)) и Гр4 (глобулярных пневмокоманд α или β в простом контуре слежения нет - табл.1), а гидротриггер ГБз1 (3/2×3) с первым появлением пневмокоманды 78 переключен вправо и, следовательно, через малое гидросопротивление Rм обеспечен максимально быстрый холостой (маршевый) ход «назад» рабочего органа. Ход назад с одновременным поворотом главной гироскопической оси 11 на угол -Δγ в сторону «провалившегося» щупа 1 (Щ1 фиг.10) длится доли секунды до исходного переключения пневмодатчика IV, который с ранее включившимся пневмодатчиком III совместно переключает пневмоклапан И2 (фиг.12). Сразу в систему управления поступает пневмокоманда 76 «поперечно вперед» (медленно). Начинается поиск согласованного переключения двух пневмодатчиков 1 и II. Несколько ходов «назад-вперед» позволяют правильно самоустановиться нормали N-N «флюгера» сварочных клещей по ребру контура фланцевого соединения и занять положение для начала сварки первой точки и последующих следящих шагов рабочей продольной подачи по пневмокоманде 77.
Аналогичные процессы происходят в системе управления при четном полуцикле в плоскости XOZ (см., например, схемы №5 и 8 таблицы 5).
Отработка случайных (вероятностных геометрических возмущений)
При «плавании» точки окончания технологической операции на предыдущем изделии по отношению к той же пространственной точке начала такой же технологической операции на последующем изделии производственного потока и накопленные геометрические погрешности как самого изделия, так и его базирования по постам поточной линии создают при поперечной установочной подаче вероятность опасного сближения технологического инструмента с изделием. Это может привести либо к порче изделия, либо инструмента (см. реакции на команду 76 схем 1 и 8 таблицы 6 в плоскости XOY). Избежать этой опасности позволяет принцип Жака Понселе - регулирования векторов скорости рабочего органа на входе в систему управления. Каждому мгновенному фазовому состоянию системы управления в двух фронтальных плоскостях соответствует идентичность градиентов взаимно перпендикулярных векторов одной и той же прямоугольной векторной системы (создаваемой в одной и той же фазе одним и тем же гидрорезольвером). При этом одинаковым градиентам скоростей соответствует обратная пропорциональность их величин. Для логического гидроблока Г1 (в блоке Б7) характерна индифферентность к знаку (±) градиента вектора, т.к. один и тот же гидрорезольвер лишь дифференцирует величины гидросопротивлений его синусно-косинусных датчиков при одной и той же фазе для разных фронтальных плоскостей. Из п.2 примечаний к таблицам 1 и 2 следует, что нормаль N-N технологического инструмента параллельна главной гироскопической оси, но для плоскости XOZ она совпадает с направлением вектора Y (дополнительного гидропривода), а для плоскости XOY - с вектором Z. Доминантный вектор установочной поперечной подачи для плоскости XOZ есть +Z, а перпендикулярная ему рабочая подача вдоль нормали N-N, совпадающая с направлением (градиентом) дополнительного вектора Y, образует двугранный прямой угол. Дополнительный вектор или равен нулю, или слишком мал по величине для быстрого отдергивания технологического инструмента при опасном сближении с изделием в данной фронтальной плоскости, но простым переключением элементов пневмогидроблока Б7 в Г1 (фиг.23) на мгновенное схемное «заимствование» в другой фронтальной плоскости идентичной векторной системы позволяет подменить малую синусную величину дополнительного вектора скорости в двугранном углу на перпендикулярную ему в той же прямоугольной векторной системе другой фронтальности большую косинусную величину скорости с противоположным знаком антиударного отдергивания технологического инструмента.
Например, при доминирующей установочной подаче в направлении +Z («вниз» - схема 1 таблицы 5) избежать опасного сближения технологического инструмента с изделием возможно, если оба лицевых щупа VII и VIII Щ1 (фиг.10) качнутся одновременно «вниз» по положительной амплитуде возмущения. В пневмоблоке Б3 (фиг.16) от одновременных пневмосигналов 107 и 108 срабатывает пневмоклапан И12, от которого пневмокоманда «+оба лицевых щупа» раздваивается - вниз к левому торцу пневмотриггера П9 (показано) и напрямую вверх через левый вход левого золотника РТ3-1 - тандема (- 3/2+3/2) обратного подключения - в линию +136 к пневмоблоку Е4 блока В2 (Б2.2 фиг.15), где она проходит через ИЛИ43, ИЛИ44 в пневмоблок В3 (фиг.14) к ИЛИ25 и в линию +144 (у) пневмоблока Б2.1 к пневмогидроблоку Б6 логического гидроблока Г1 (фиг.23), т.е. «вверх» в направлении NN противоположно рабочему ходу штокового электрода 37 клещей РО (фиг.7).
Одновременно при «заимствовании» для плоскости XOZ косинусного вектора из условий фронтальности XOY в схеме №1 таблицы 6 фронтальной плоскости XOY для антиударного отдергивания штокового электрода 37 (фиг.7 и 8) в XOZ к пневмогидроблоку Б7 Г1 поступает пневмокоманда 78 от пневмоблока Б1.1 (фиг.12), которая переключает ГБз1 (3/2×3) на быструю маршевую скорость (фиг.23), а ГБз3 (4/2×2) переключается вправо пневмокомандой (XOY*2) «заимствования» другой фронтальности (вместо XOZ) от пневмоблока Б3 (нижняя линия 165'' на фиг.16) - XOZ меняется на XOY пневмокомандой 166''. И также по условиям схемы №1 таблицы 6 меридиональный сигнал 155 (α) заставляет переключиться ГБз2 (3/2×2) НЕ вправо (фиг.23). С выходов гидродатчиков проходят гидропотоки: от (cosαy)29 через ГБз3 перекрестно, через ГБз2 (по левому золотнику - наклонная стрелка), через Rм и через ГБз1 (3/2×3) по наклонной стрелке на вход Д Гр1 (в Б6). Таким образом, имеет место не только «заимствование» большой доминантной скорости от cosαy в (Грзα)34, но и одновременно с переключением ГБз1 вправо создается максимальная антиударная скорость отдергивания технологического инструмента. Несмотря на резкое возрастание величины доминантного косинусного вектора +у и пропорциональное же увеличение синусного дополнительного вектора +Z градиент вектора отдергивания сварочных клещей остается неизменным и для схемы №1 табл.5, и для схемы №1 табл.6. Во время антиударного отдергивания исчезает наклон стержней щупов, и тотчас исчезают пневмосигналы 107 и 108. Состояние схемы Б7 в Г1 возвращается к исходному положению для плоскости XOZ, т.е. состоялся возврат заимствованного «долга». Такова реакция на положительную амплитуду геометрического возмущения. Аналогично работает система управления для отрицательной амплитуды возмущения (с изнанки фланца) с той разницей, что пневмокоманда «минус оба изнаночных щупа» от И 13 (фиг.16) переключает П9 влево на перекрестную схему, а с его входа пневмокоманда фронтальности XOZ 165' по стрелке вверх направо переключает РТ3-1 влево, заставляя пневмокомандой (-)137 через пневмоклапаны ИЛИ41 и ИЛИ42 в пневмоблоке Е4 (Y) пневмоблока В2 в Б2.2 (фиг.15) проходить к В3 пневмоблока Б1.1 (фиг.14) к ИЛИ26 и давать пневмокоманду 145 (-у).
Когда работают щупы Щ2 в плоскости XOY, эти процессы происходят еще нагляднее. Главные полусферические щупы с ребордами 70 (фиг.11) при установочной поперечной подаче, наезжая на положительную амплитуду отклонения точки начала сварки изделия в пространстве робота, одновременно приподнимаются от номинала. Теперь вместо схемы №1 табл.6 для плоскости XOY «заимствуется» схема №1 из табл.5. Происходят те же переключения, но антиударное отдергивание доминантно возникает в направлении (-Z) по пневмокоманде в пневмоблоке Е5 (Z) пневмоблока В2 в Б2.2 (фиг.15), а реакция на отрицательную (изнаночную) амплитуду +Z (помнить перевернутость знака координаты Z-Z) выполняется по пневмокоманде +138. В первом случае отдергивается технологический инструмент от лицевой стороны фланца, а во втором - от одновременного качания стержней изнаночных конических щупов - «вниз» от изнаночной стороны фланца (+Z).
Свойство «заимствовать» векторную схему скоростей РО в другой фронтальности позволяет повысить производительность сварочных клещей до 300 точ./мин вместо 60 точ./мин у роботов с программным управлением, т.к. появляется возможность держать зазор раскрытия электродов порядка 10 мм и иметь минимальное время их сжатия (см. паспортную производительность точечной сварочной машины МТ1613 Санкт-Петербургского завода «Электрик»).
Случайными могут оказаться возмущения в виде непредвиденных технологических отклонений в геометрии траектории слежения во время продольной рабочей подачи в виде выпуклостей или впадин. Встреча с выпуклостью заставляет приподняться только впереди идущий щуп VII или VIII (фиг.10 и 11) с лицевой стороны фланца. Пневмосигнал 107 проходит через ИЛИ86 в Цк (фиг.6) в виде пневмосигнала 83 и переключает пневмоклапан НЕ1. Рабочая полость силового цилиндра блока пневмоцилиндров соединяется с атмосферой. Вспомогательный поршень отходит к задней крышке рабочего пневмоцилиндра и за ним - рабочий силовой поршень, отводя от выпуклости штоковой электрод 37. Аналогично при встрече с впадиной пневмосигнал 109 (или 110) на фиг 16 через ИЛИ87 проходит к Цк (фиг.8) в виде пневмосигнала 82 и переключает пневмосигнал НЕ2, что заставляет, как и в первом случае, отвести скобовой электрод 36 от впадины.
Ось Мз не изменяет своего обозначения, как и ось (Мωк )18, которая не фигурирует в таблице 3.
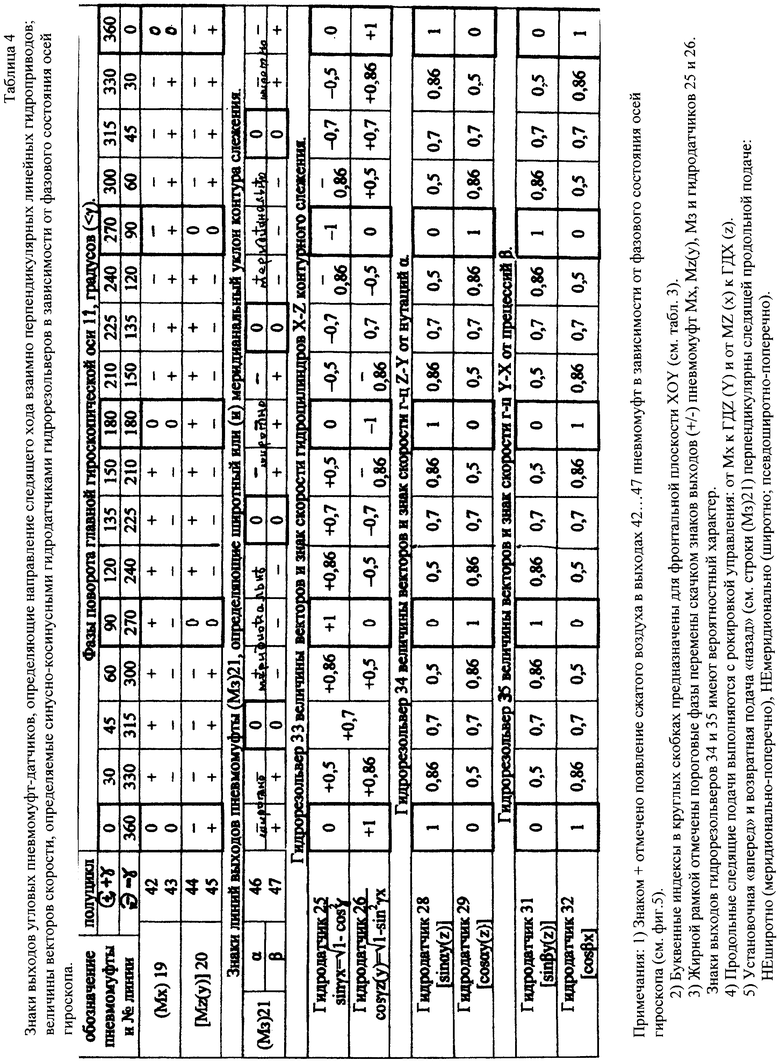
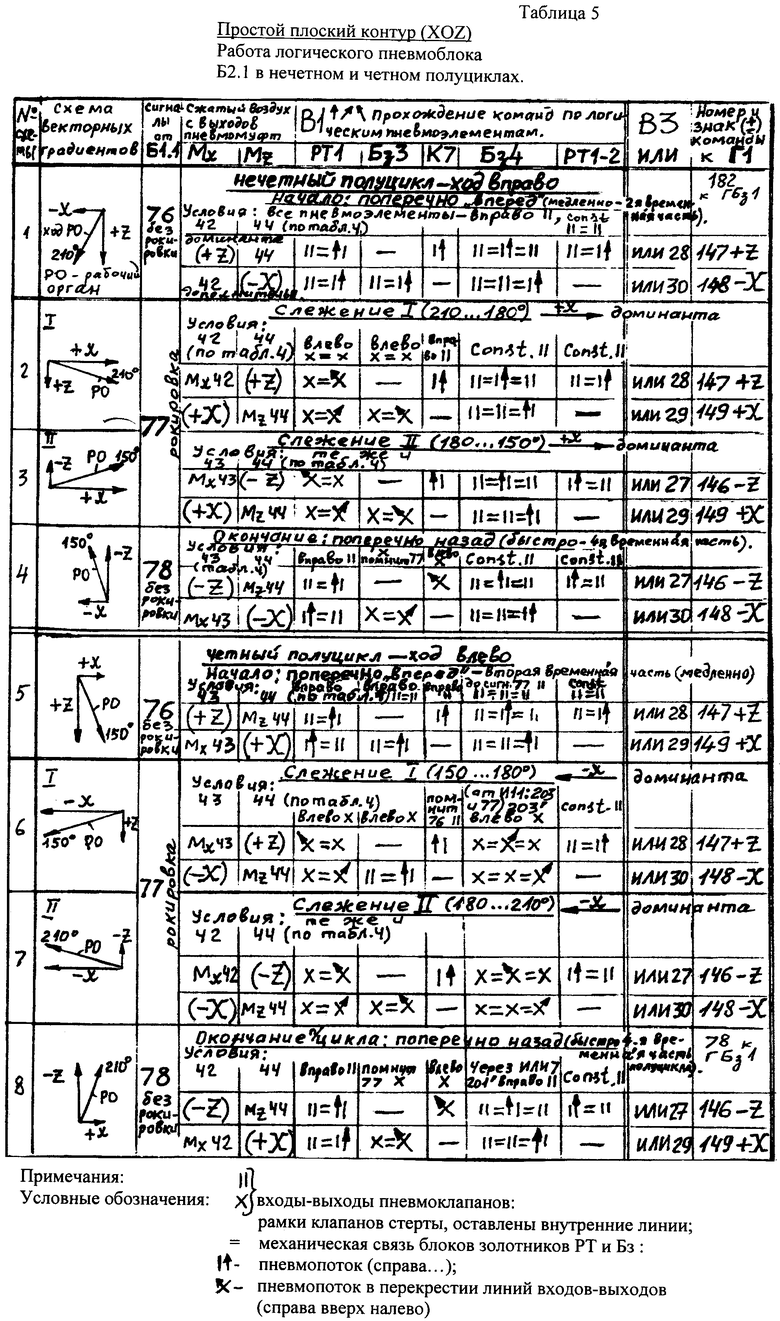
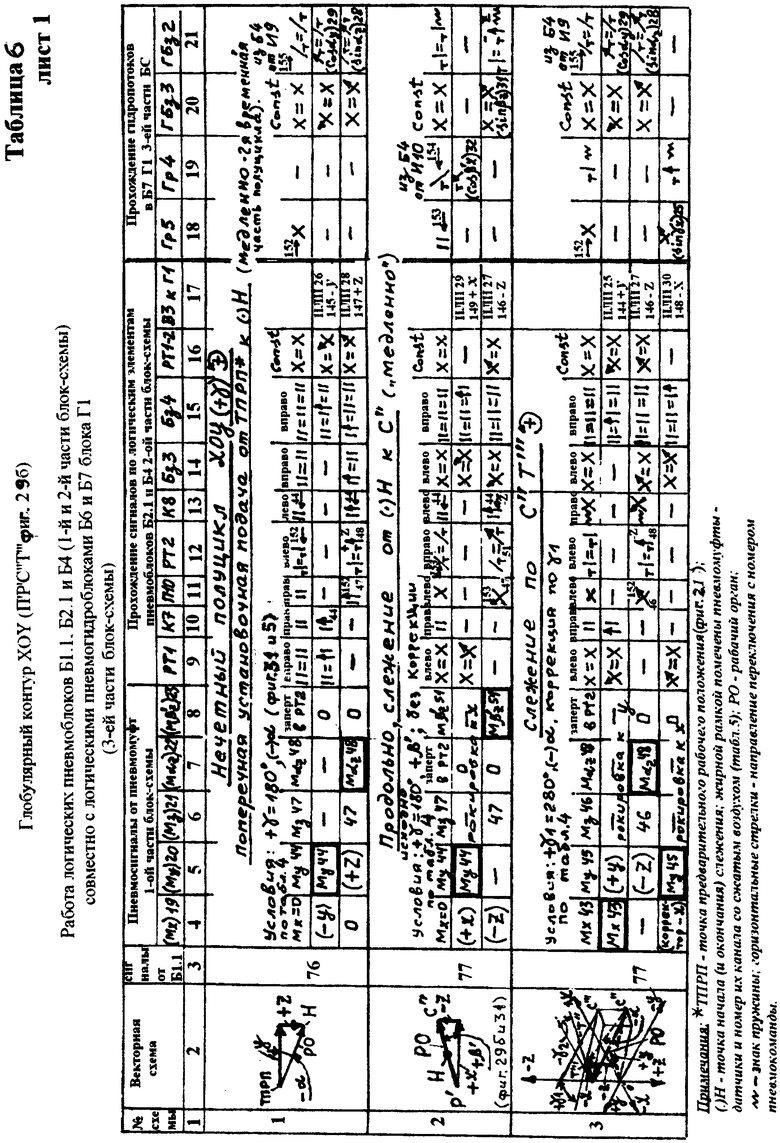
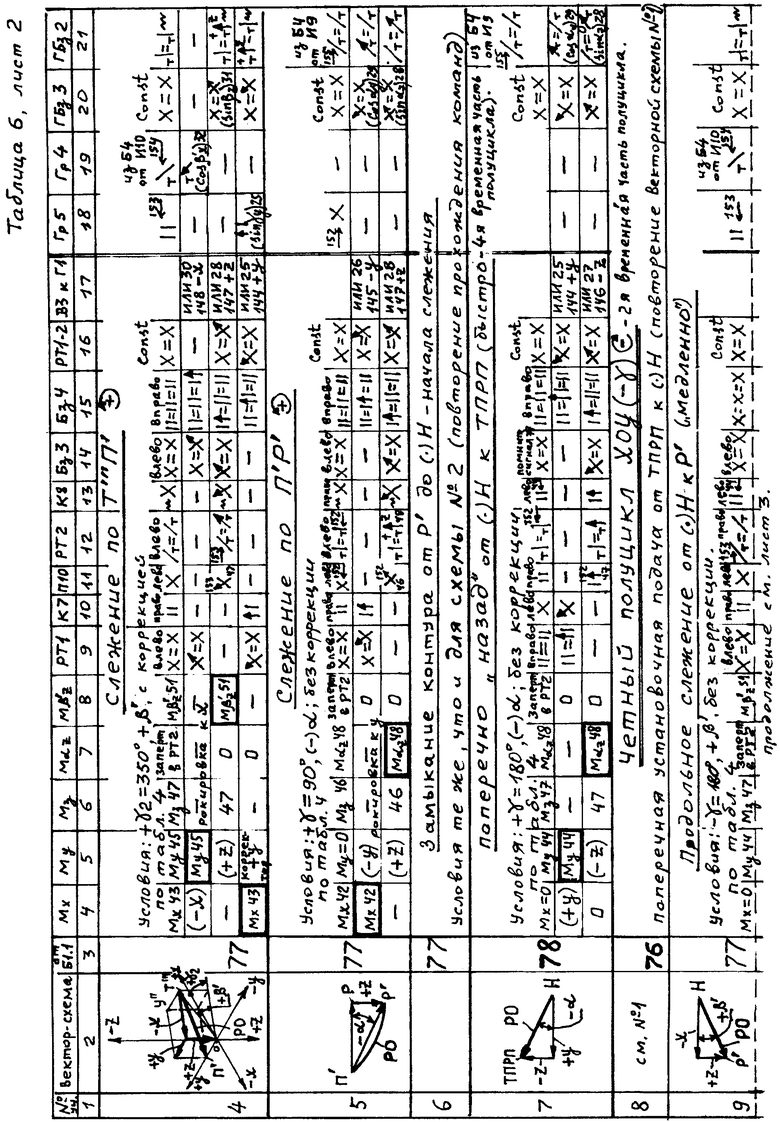
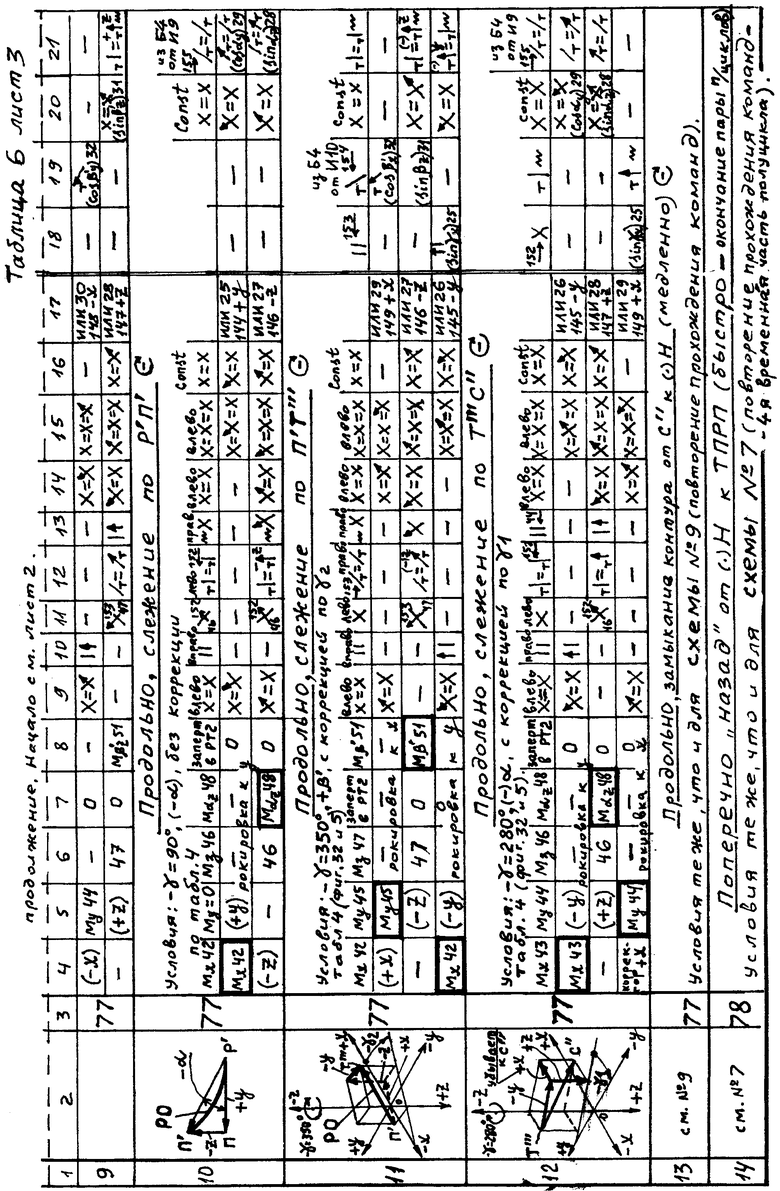
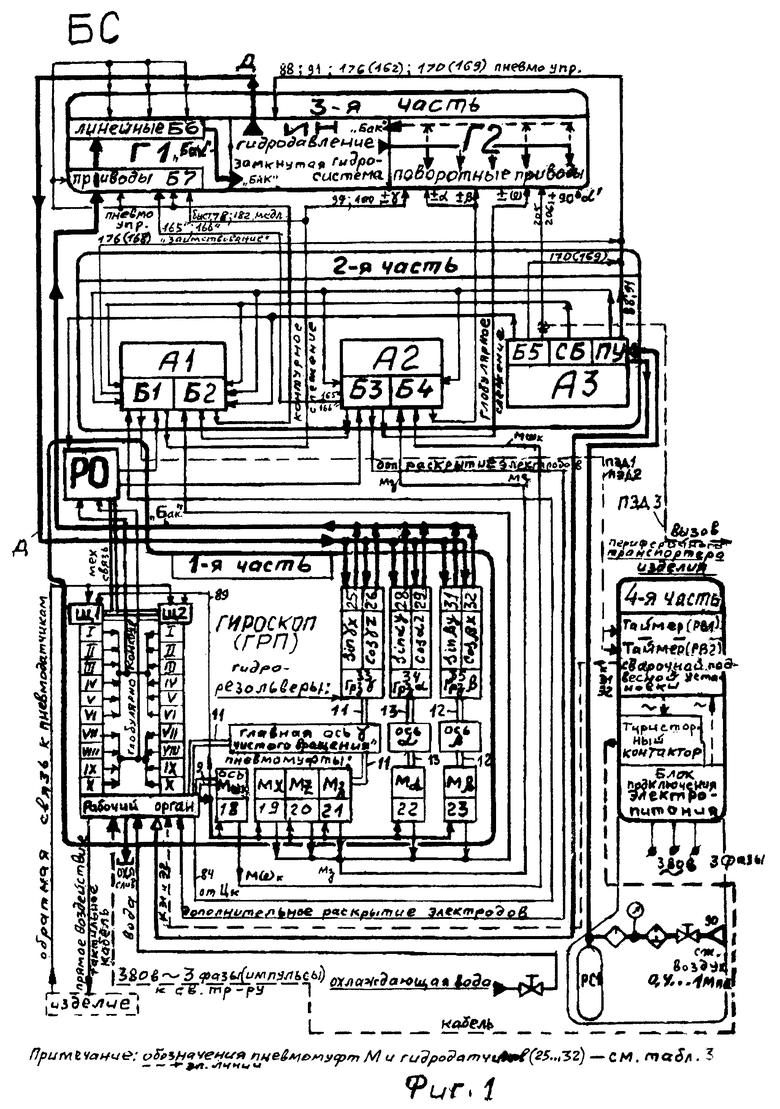
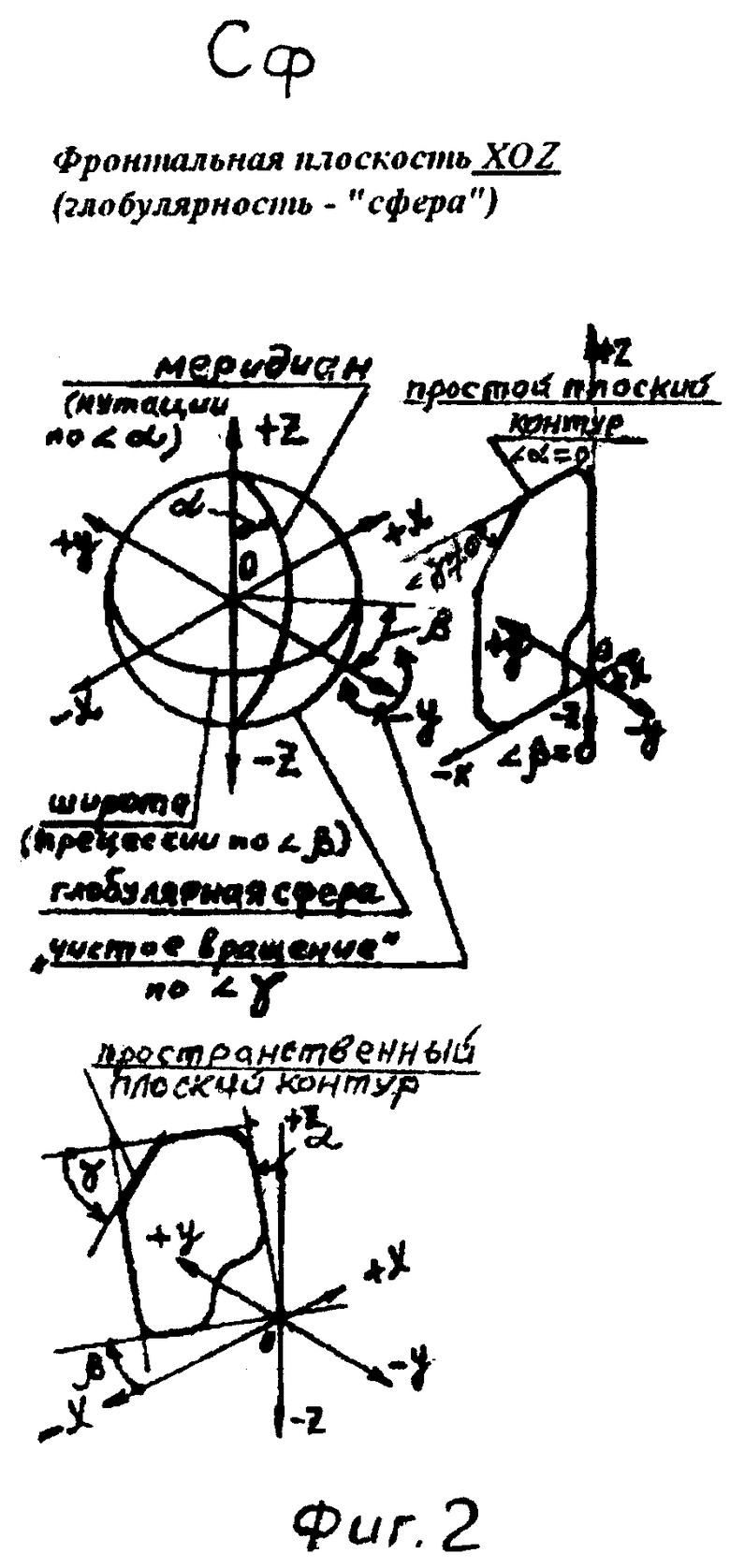
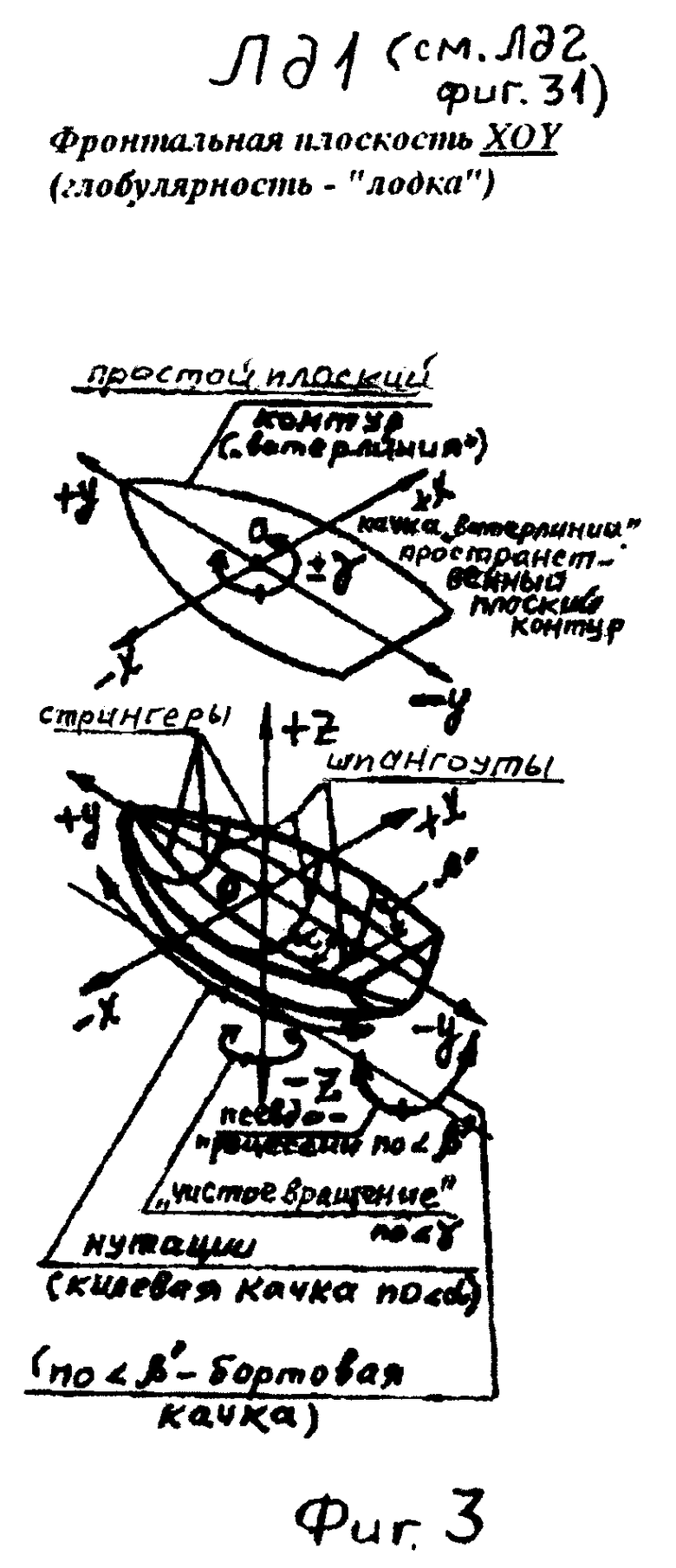
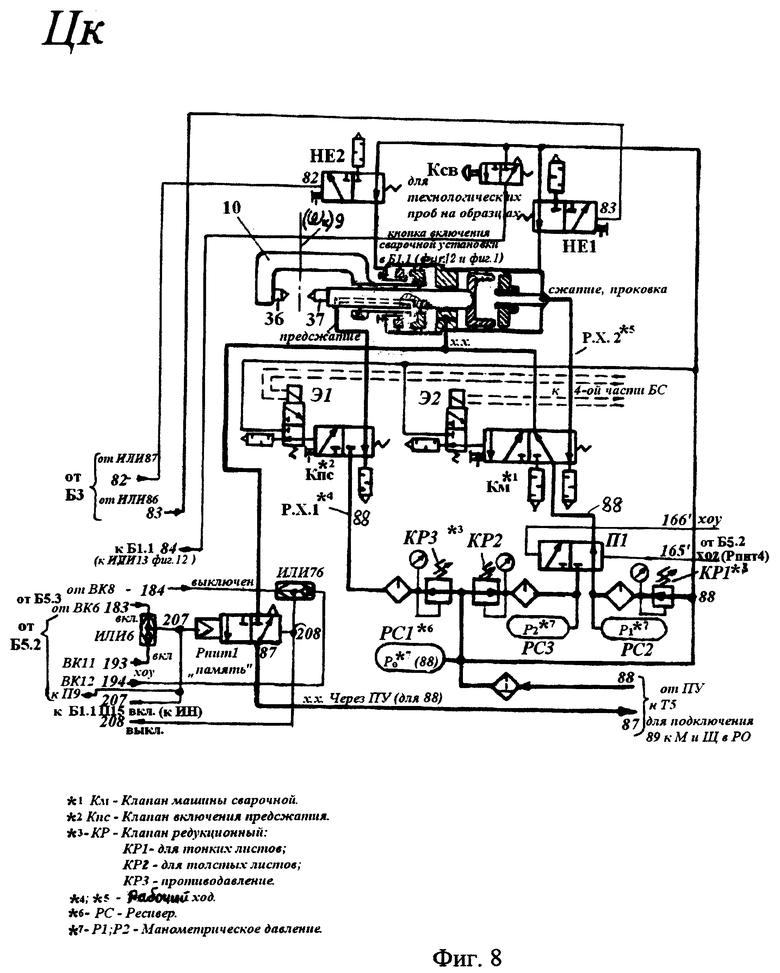
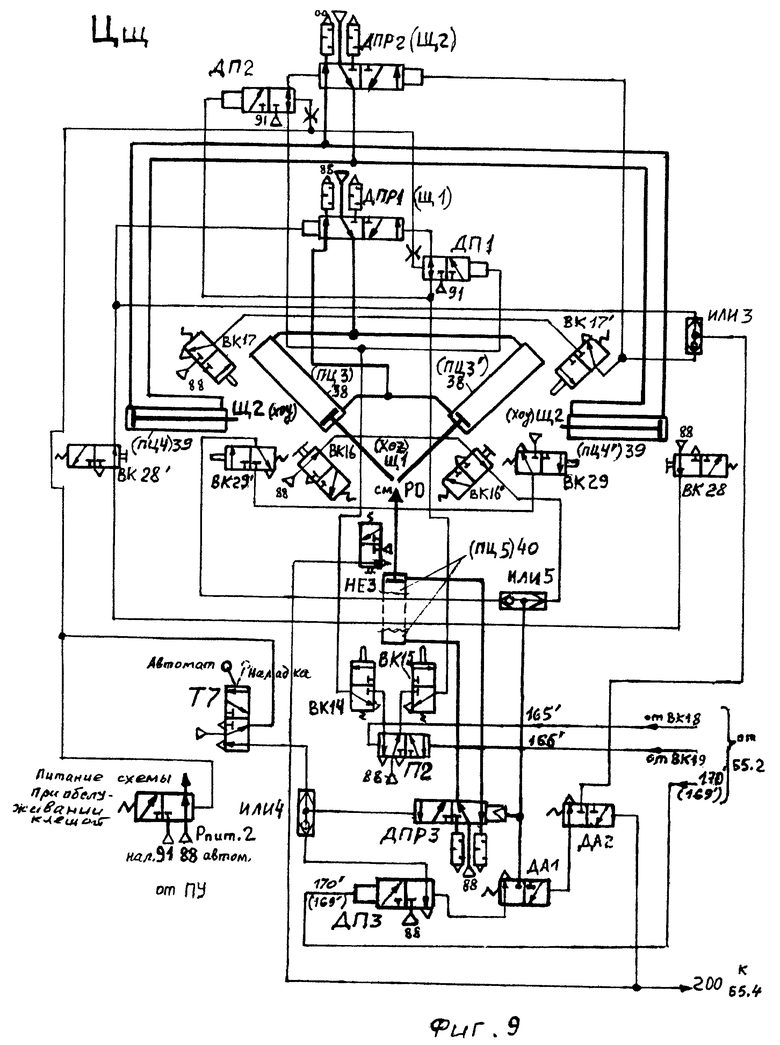
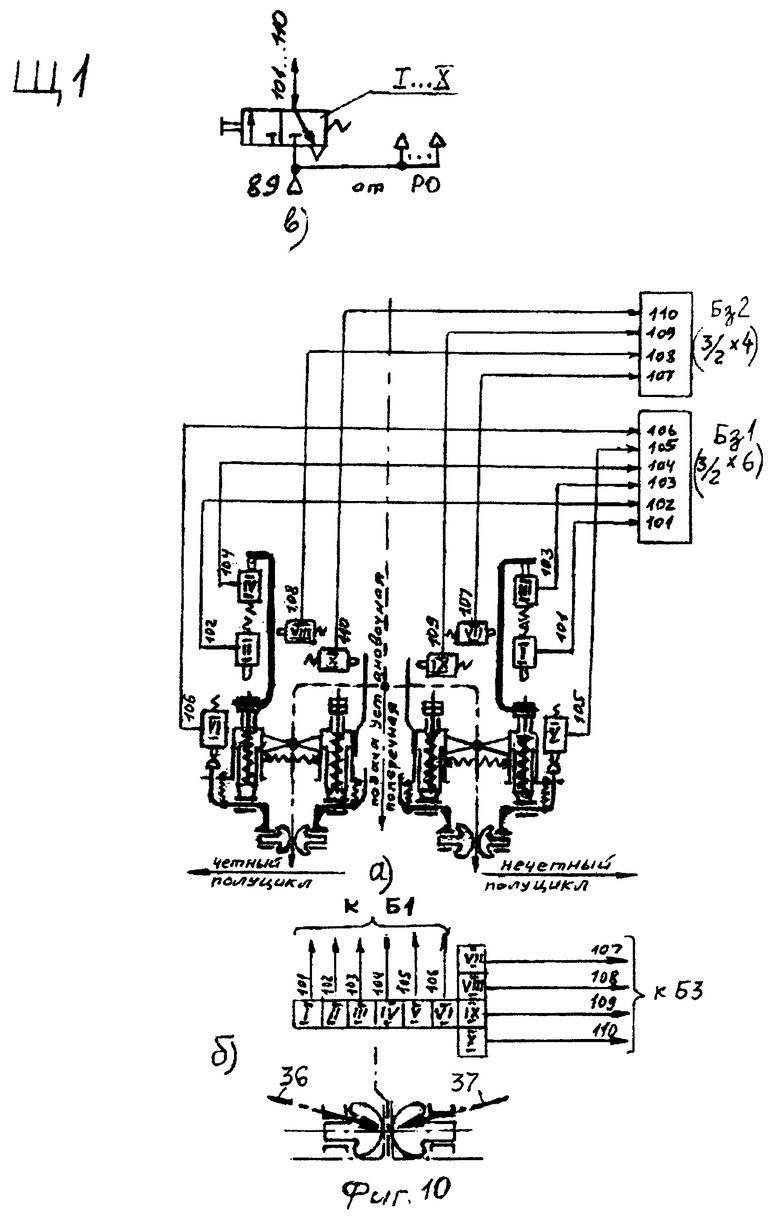
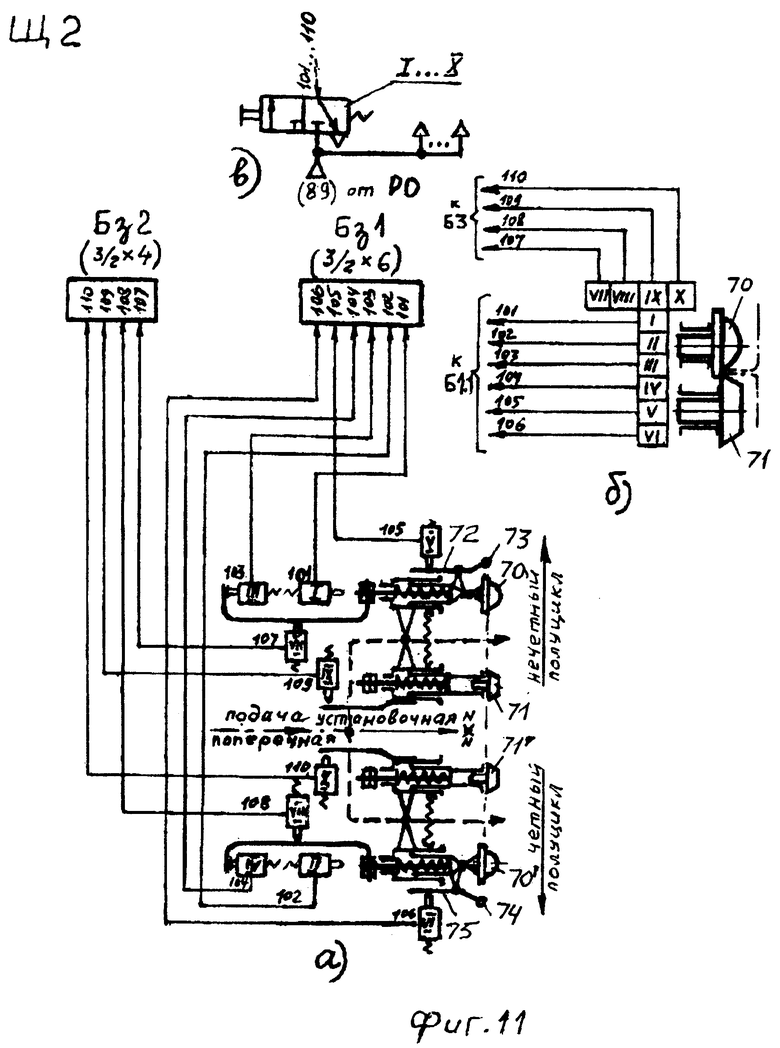
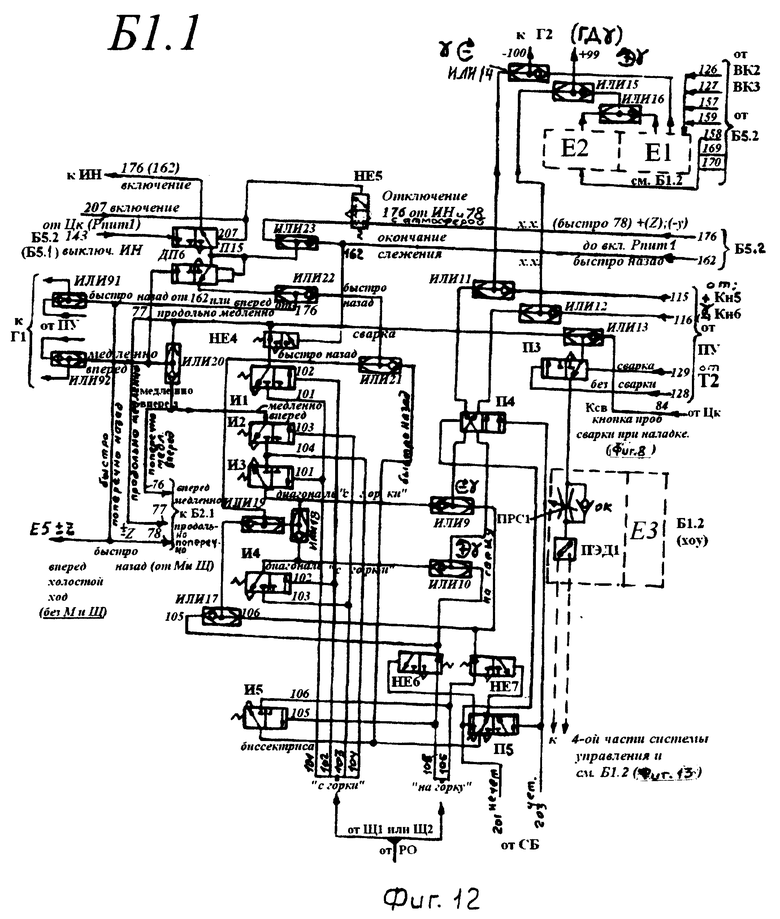
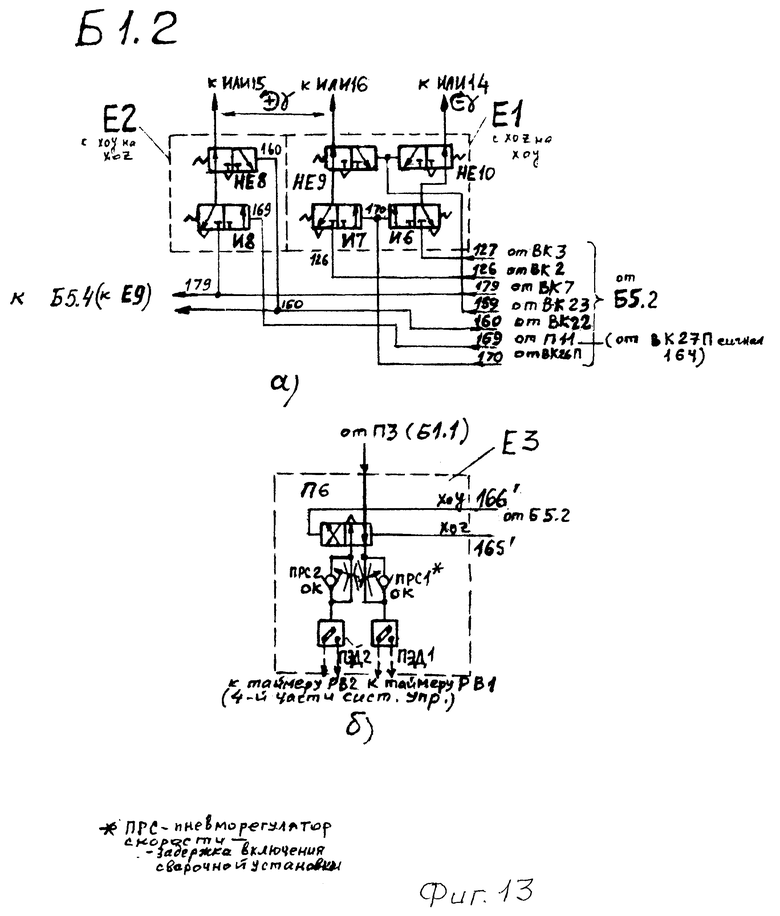
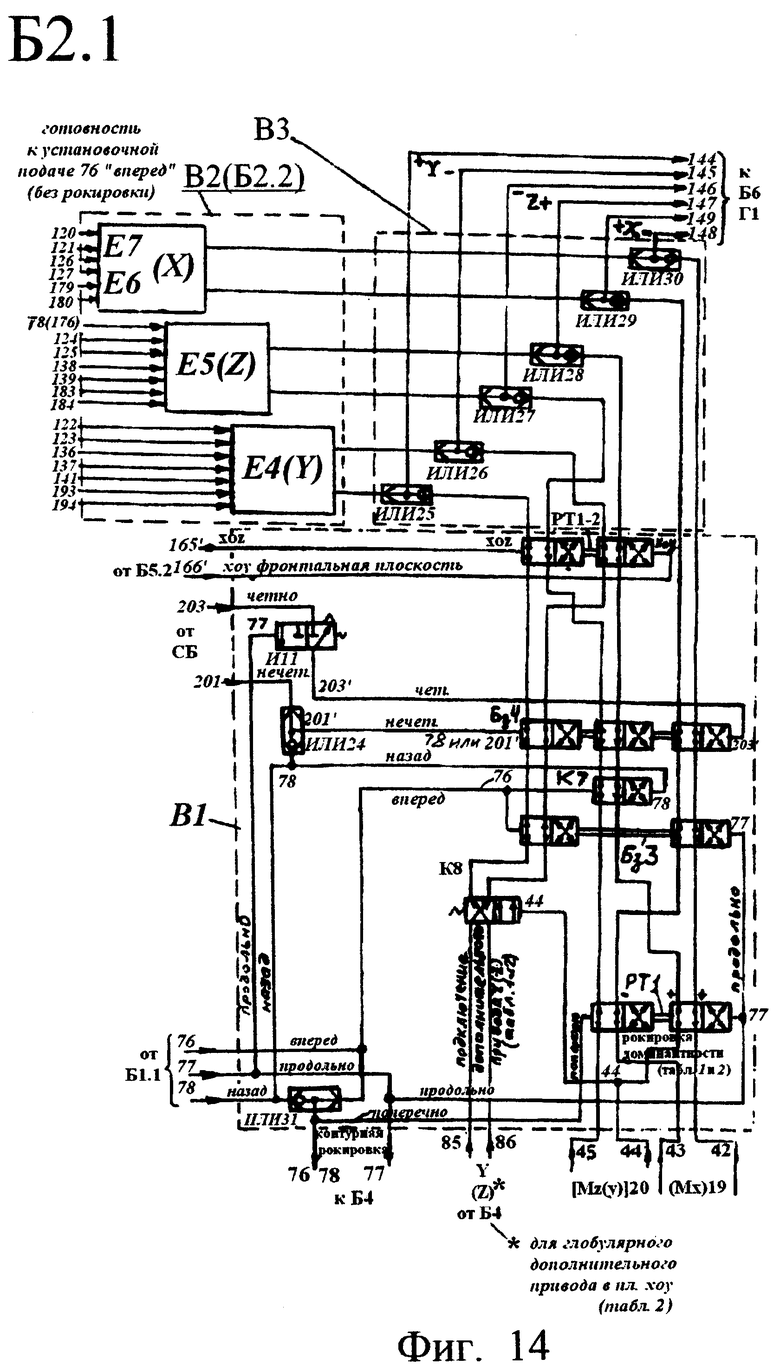
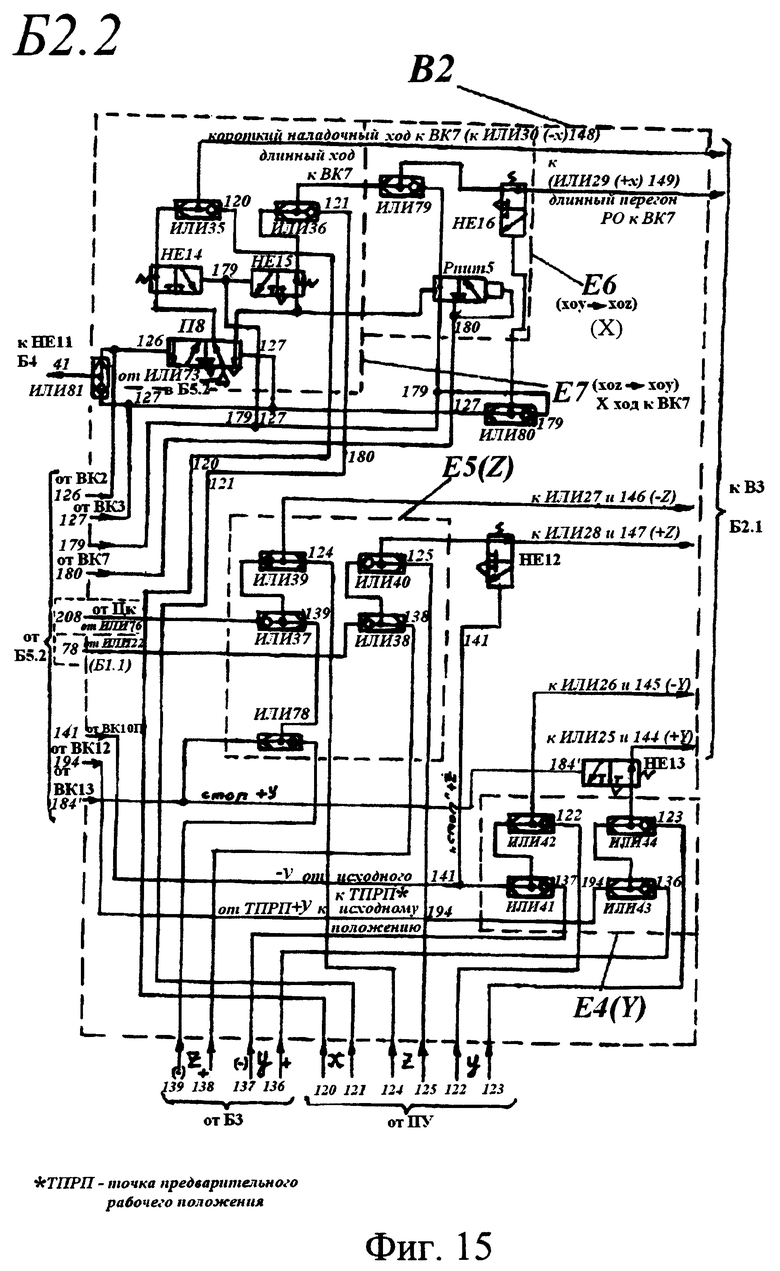
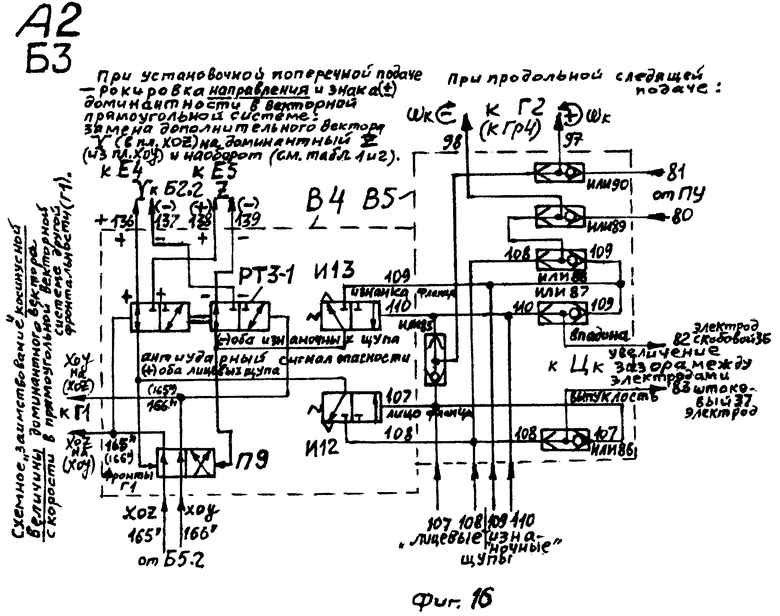
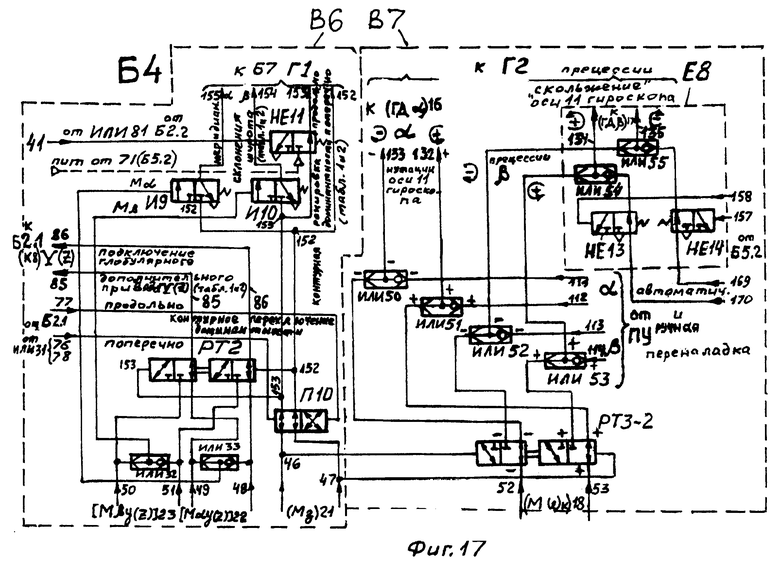
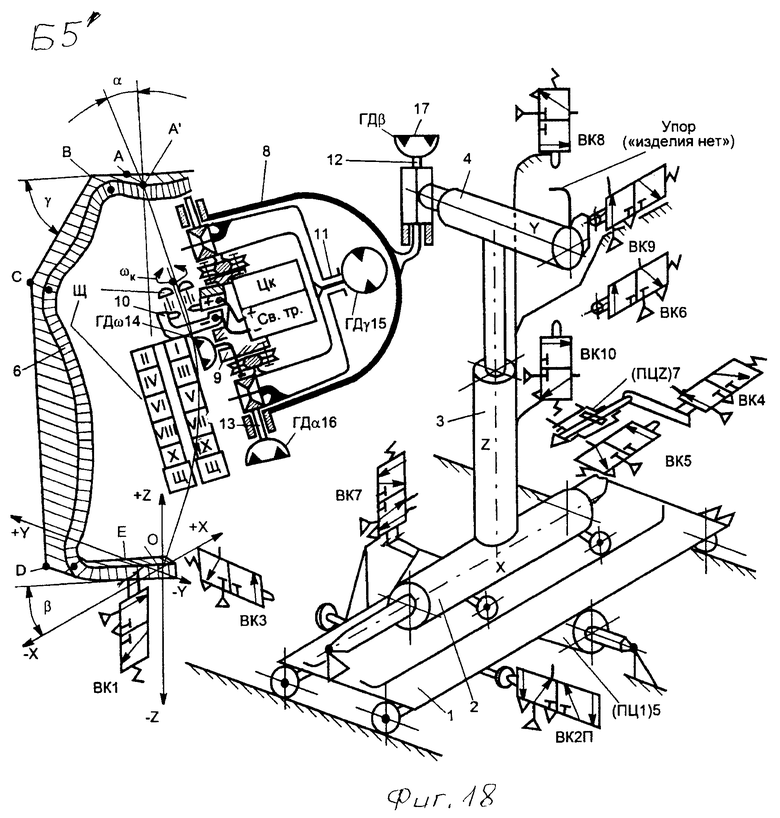
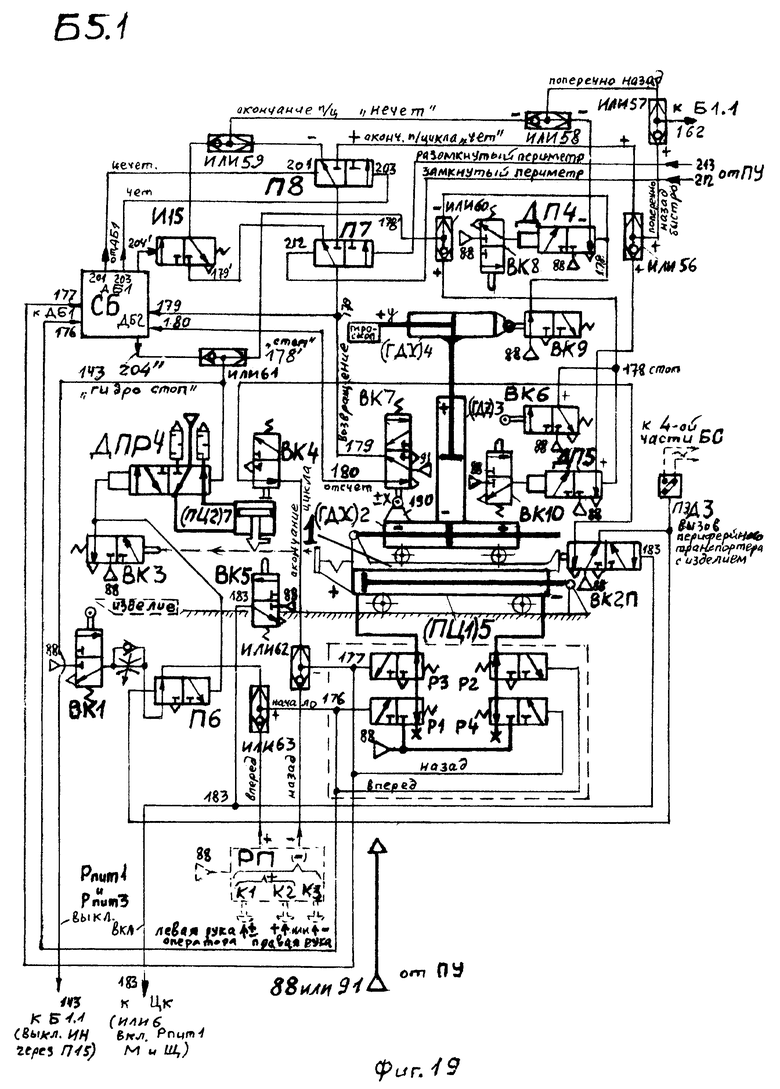
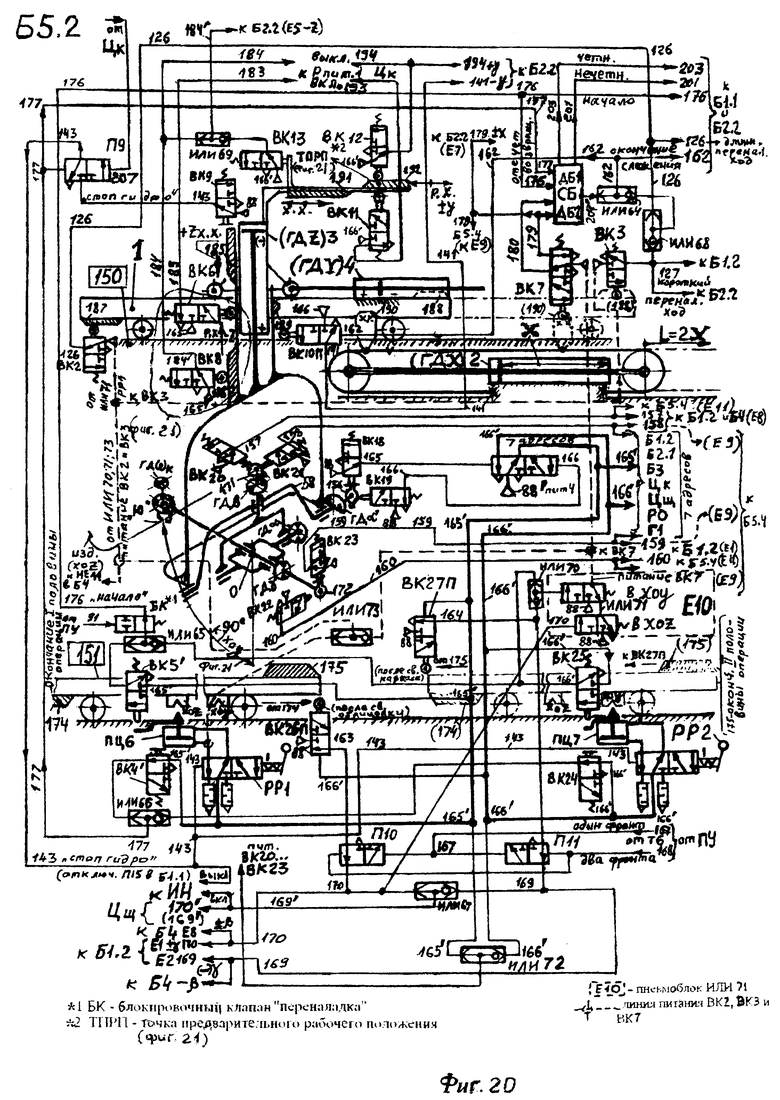
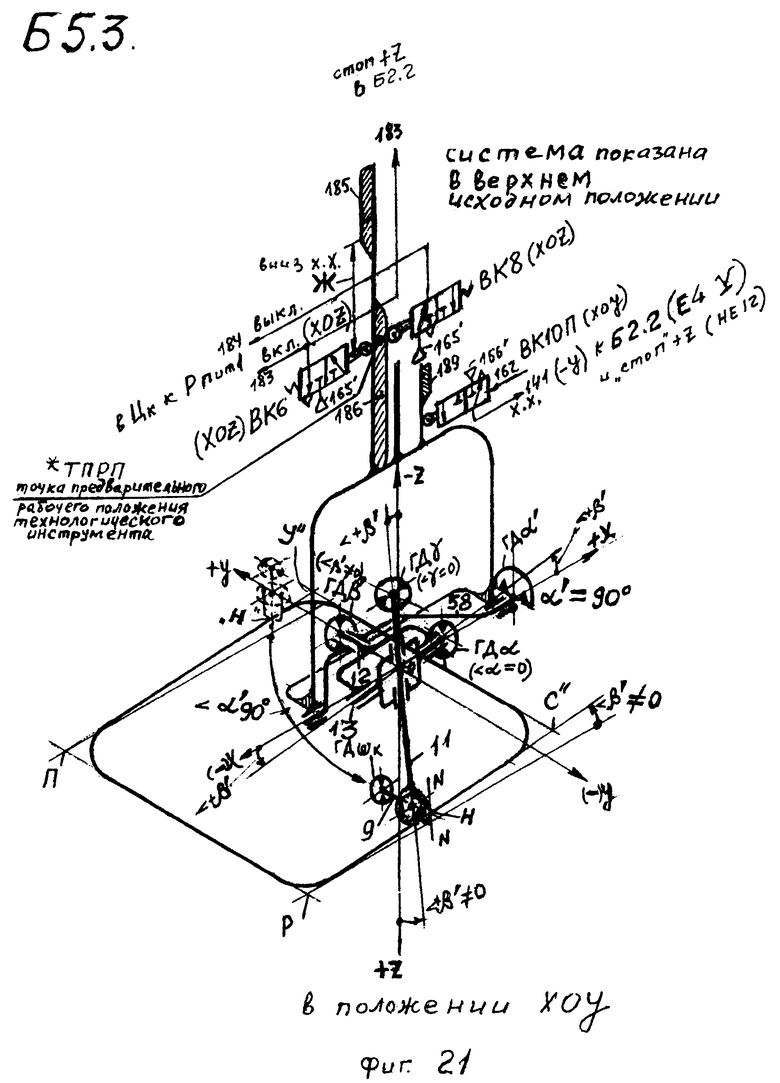
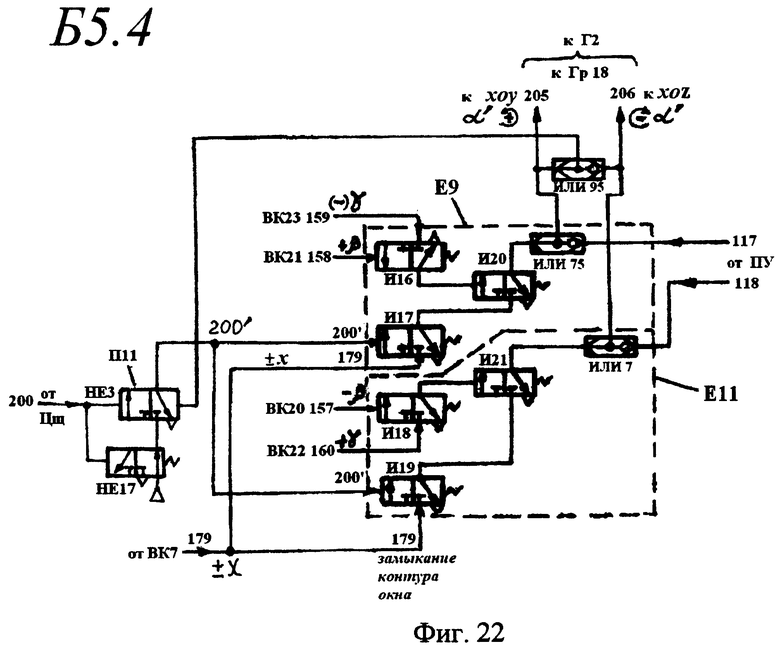
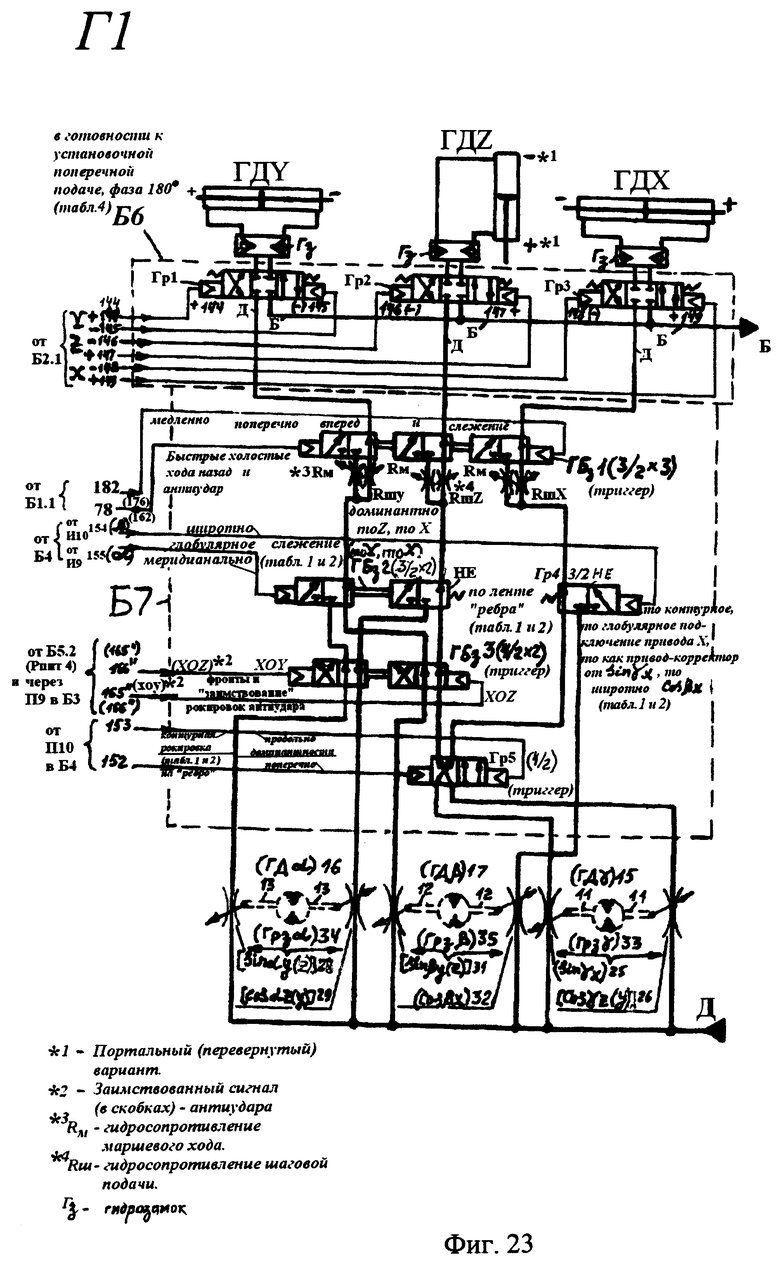
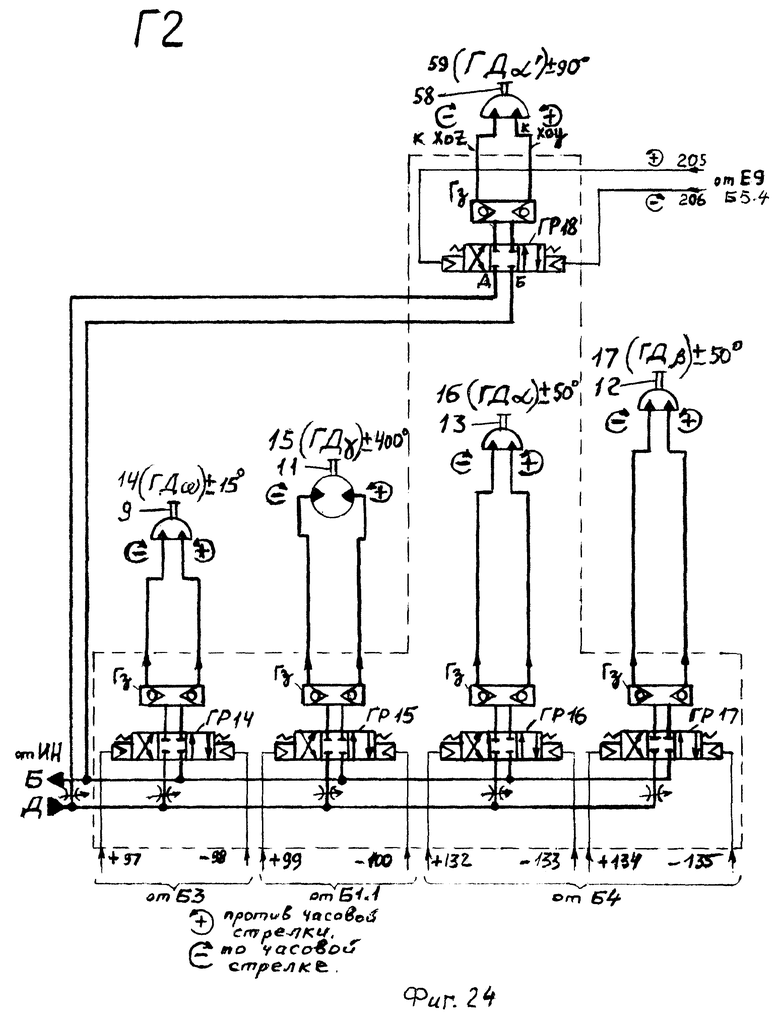
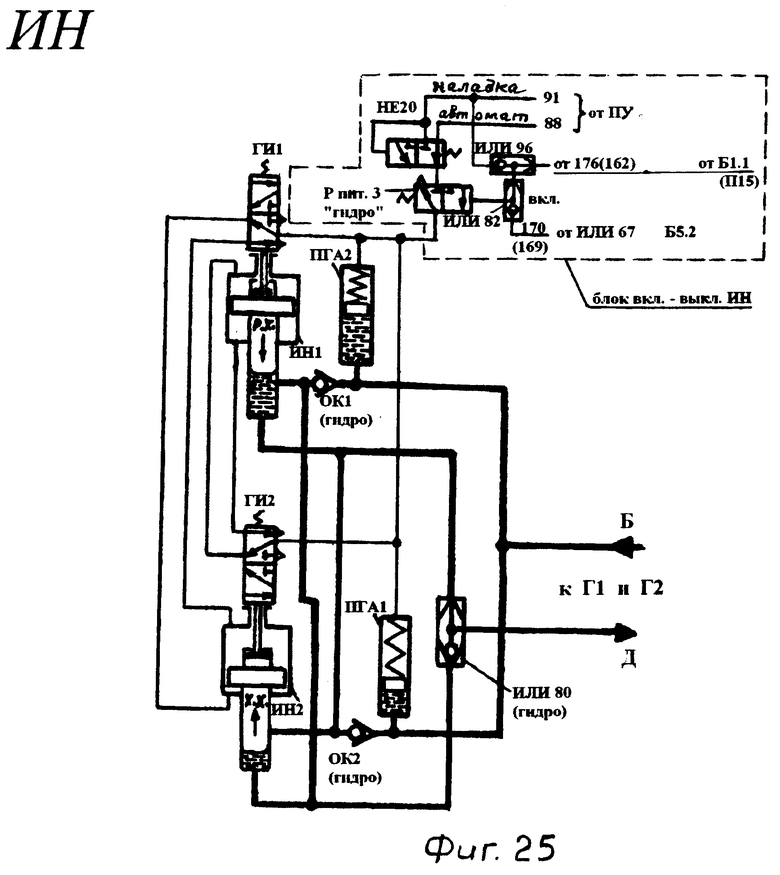
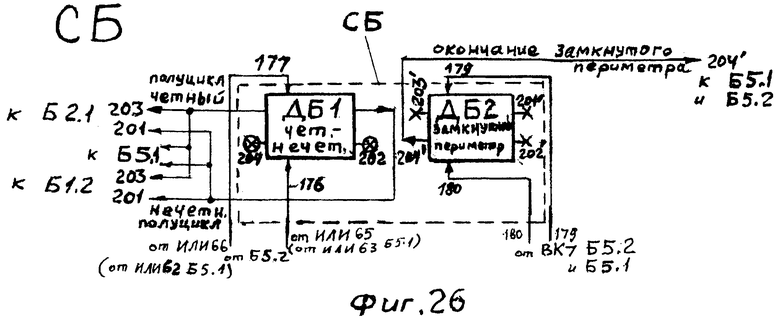
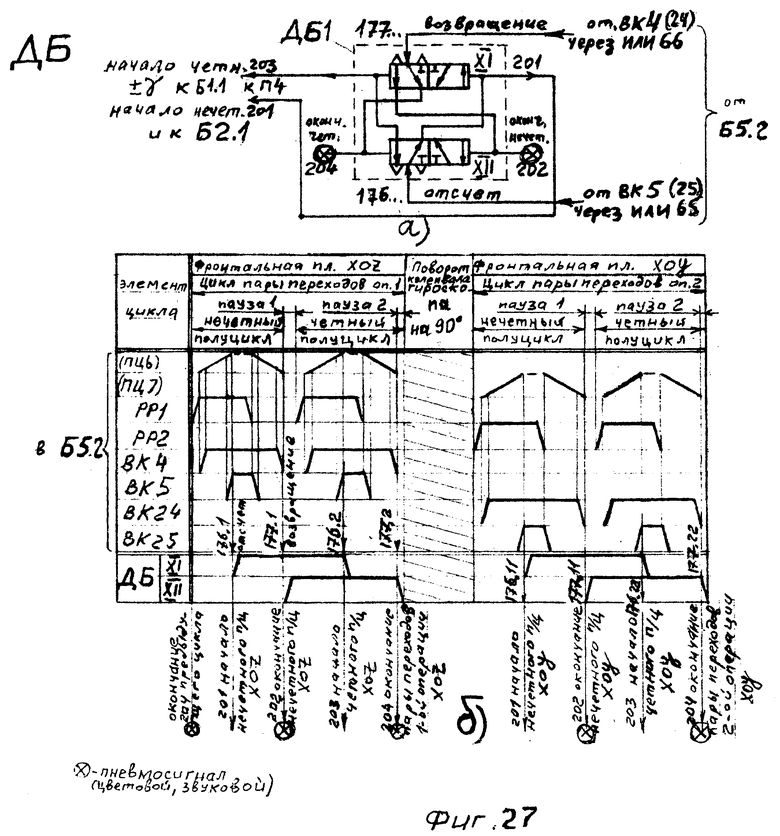
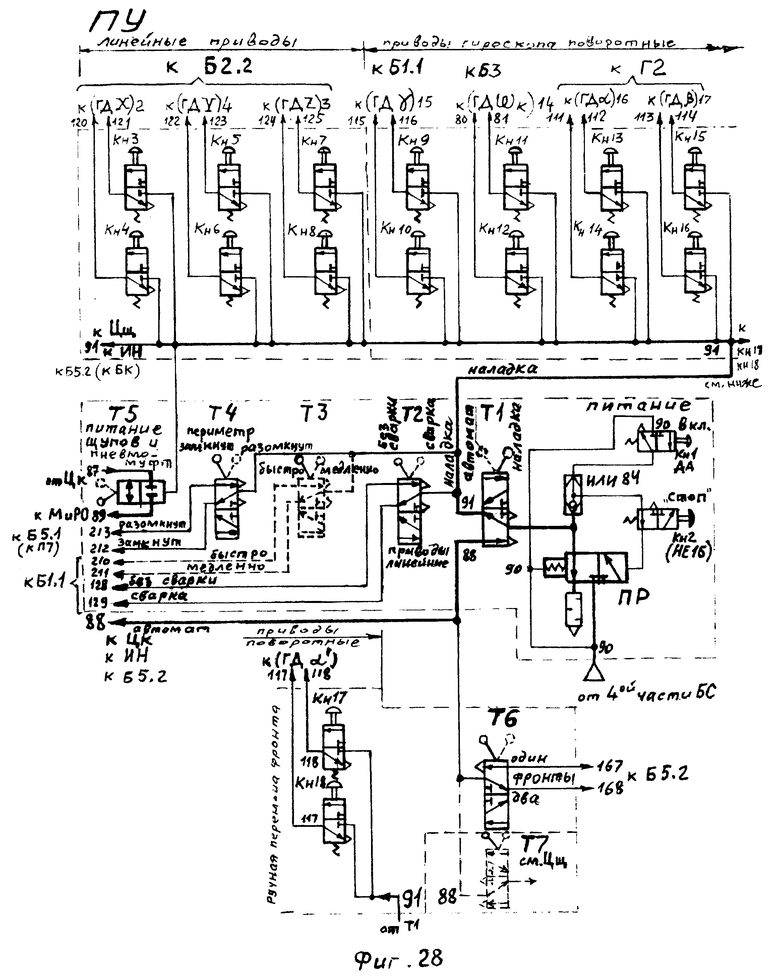
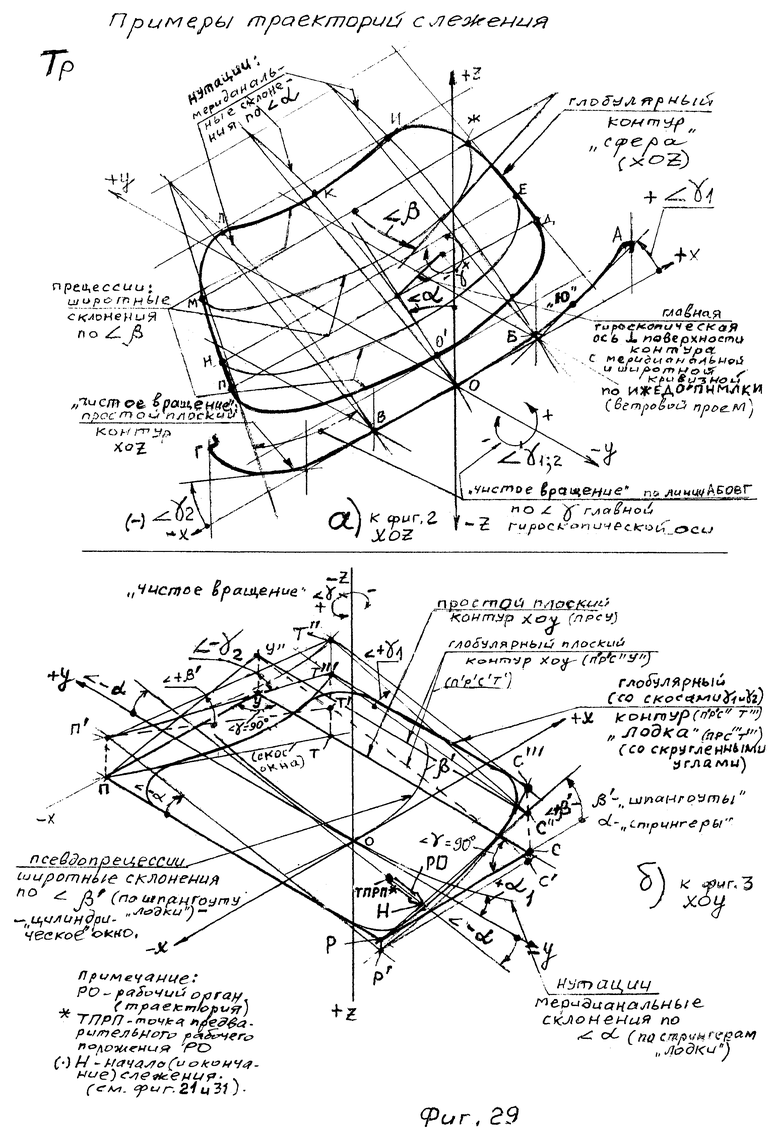
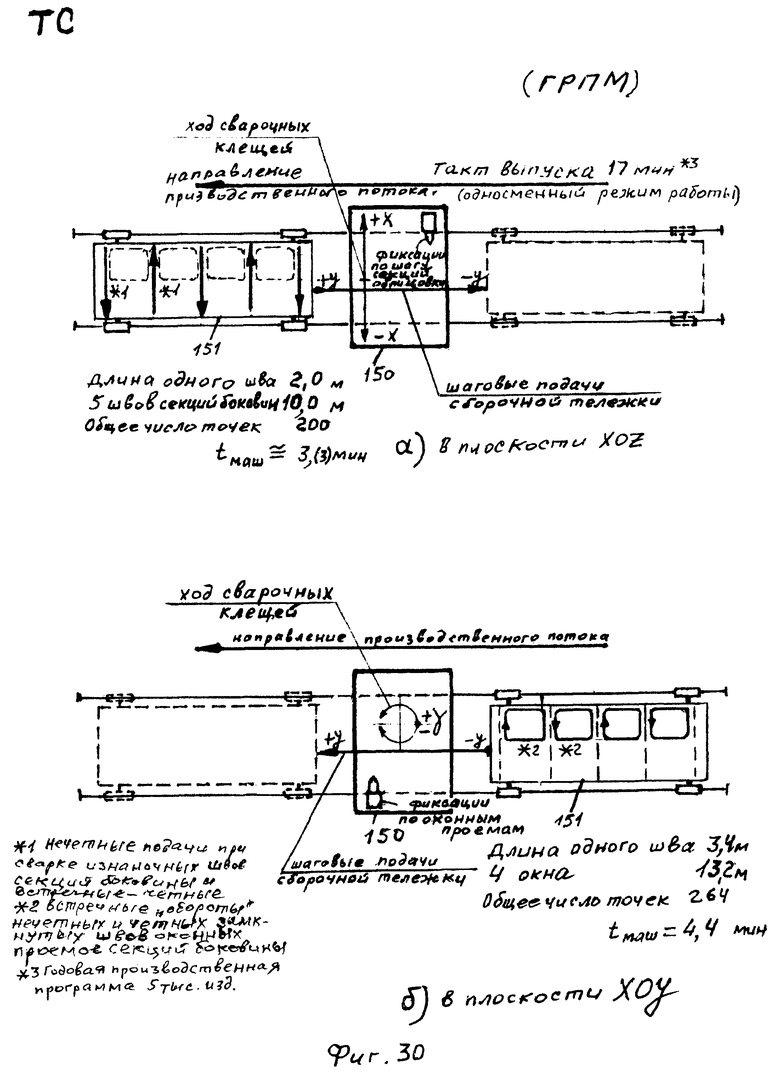
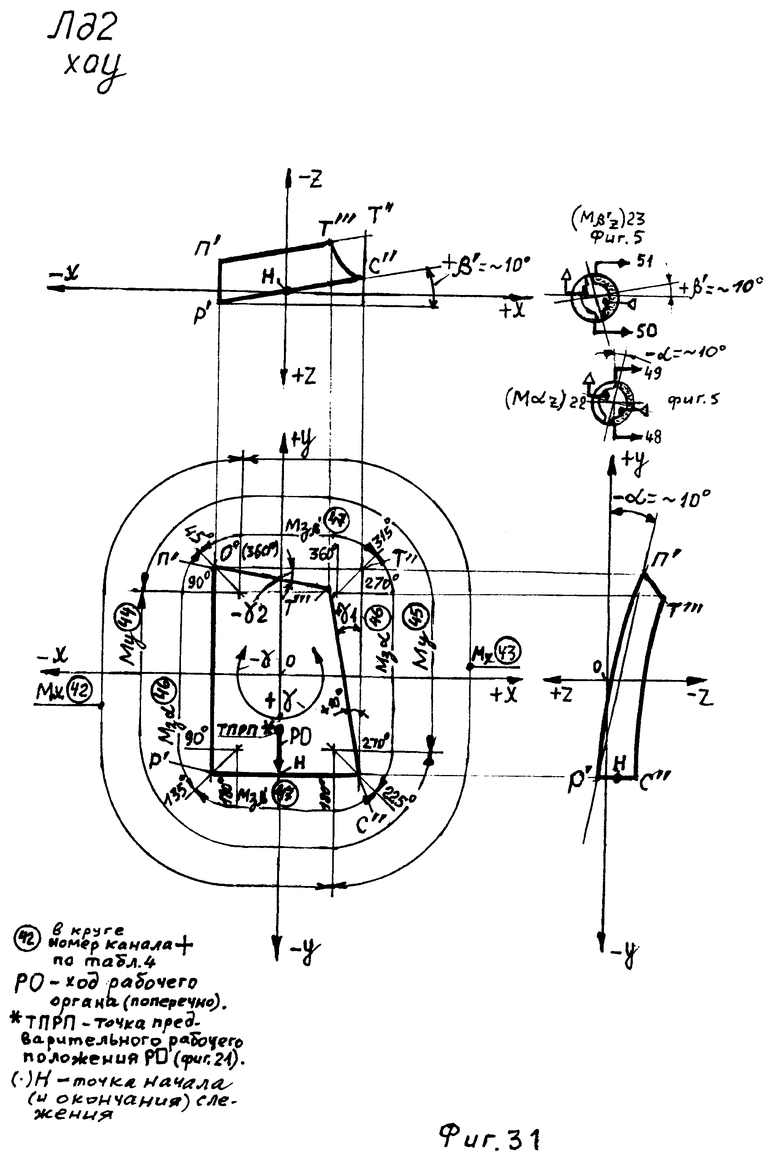
Изобретение относится к пневмогидравлической системе управления, являющейся единой для адаптивного пневмогидравлического робота консольного и портального исполнения. Система способна управлять слежением по изделию со стабильной скоростью независимо от изгибов траектории слежения в меридиональном и широтном направлениях поочередно в двух фронтальных плоскостях декартова пространства с автоматической сменой разнохарактерных блоков тактильных щупов и пневмодатчиков. Система управления отрабатывает детерминированные (дизайнерские) геометрические возмущения при продольных следящих подачах и вероятностные (случайные) геометрические возмущения при установочной поперечной и продольной подаче, в том числе связанные с «плаванием» точки окончания-начала выполнения повторяющихся элементарных операций на последующем по сравнению с предыдущим изделии (например, сварных точек). Изобретение позволяет повысить надежность и долговечность, система управления дешевле аналогичной электронной, а ее свойство удерживать минимальный зазор между электродами сварочных клещей (технологического инструмента рабочего органа) позволяет повысить их производительность до 300 точек в минуту вместо 60 точек в минуту у неадаптивных роботов. 13 з.п. ф-лы, 31 ил., 6 табл.
1. Пневмогидравлическая система управления адаптивным пневмогидравлическим роботом, включающая следящую и стабилизирующую систему скорости хода технологического инструмента рабочего органа, блок логической пневмоавтоматики, блок пневмогидравлической логики и энергетический блок, при этом следящая и стабилизирующая система скорости хода технологического инструмента рабочего органа выполнена в виде системы угловых пневмомуфт и фазовых синусно-косинусных гидрорезольверов на четырех приводных осях гироскопа, включающих главную гироскопическую ось «чистого вращения», ось нутаций, ось прецессий и ось манипулирования нормалью технологического инструмента к касательной волнового изгиба траектории слежения, а также в виде двух блоков главных и вспомогательных щупов и пневмодатчиков с двух сторон по ходу слежения технологического инструмента, снабженного приводом рабочей подачи и дополнительного отвода от изделия, блок логической пневмоавтоматики выполнен в виде трех пневмоблоков первого уровня управления, включающих первый пневмоблок контурного слежения (А1), второй глобулярного слежения (А2) и третий жесткопрограммного пневмоуправления (A3), блок пневмогидравлической логики выполнен в виде трех пневмогидроблоков первого уровня управления, включающих логический пневмогидроблок управления линейными гидроприводами (Г1), пневмогидроблок управления поворотными гидроприводами гироскопа (Г2) и пневмогидроблок двухтактного импульсного пневмогидравлического насоса в замкнутой системе высокого гидродавления (ИН), а энергетический блок включает блок трехфазного электропитания технологического инструмента, блок тиристорного контактора, блок таймеров, блок подготовки с фильтрацией и влагоотделением сжатого воздуха, газов и подачи охлаждающего компонента, при этом блок логической пневмоавтоматики связан с блоком пневмогидравлической логики и энергетическим блоком, который соединен с технологическим инструментом.
2. Система по п.1, отличающаяся тем, что следящая и стабилизирующая система скорости хода технологического инструмента рабочего органа содержит четырехлинейные и шестилинейную угловые пневмомуфты, выполненные в виде золотника с кольцевой канавкой, разделенной двумя перегородками, причем одна полукольцевая канавка соединена с линией питания сжатым воздухом, просверленной вдоль оси золотника, а вторая выведена в атмосферу, при этом третья и четвертая линии четырехлинейной пневмомуфты образованы входом и выходом сквозного отверстия в корпусе золотника, у шестилинейной пневмомуфты кольцевая канавка золотника разделена двумя перегородками под прямым углом к центру кольцевой канавки, короткая часть которой соединена с линией питания сжатым воздухом, а длинная - с линией, выведенной в атмосферу, в ее корпусе выполнены два взаимно перпендикулярных сквозных отверстия, которые попарно соединены с входами двух пневмоклапанов ИЛИ, при этом на главной гироскопической оси «чистого вращения» установлены две четырехлинейные пневмомуфты (Мх)19 и [Mz(y)]20, перегородки канавок золотников которых взаимно перпендикулярны, а отверстия корпусов золотников параллельны, а на остальных гироскопических осях - по одной (Мω18), (Мα22) и (Мβ)23, с перегородками канавок золотников, ориентированными в начальном положении по осям декартова пространства, причем вертикальной его плоскостью, перпендикулярной фронтальной плоскости, короткая канавка золотника шестилинейной пневмомуфты (Мз)21, задающей меридиональные или широтные направления слежения, симметрично разделена.
3. Система по п.1 или 2, отличающаяся тем, что в блоке логической пневмоавтоматики один пневмоблок А1 первого уровня управления снабжен двумя пневмоблоками второго уровня управления - пневмоблоком (Б1) контурных рокировок поперечных подач на продольную следящую, формирования знака (±) пневмосигналов контурных поворотов главной оси «чистого вращения» гироскопа и связи с энергетическим блоком включением таймеров и пневмоблоком (Б2) формирования пневмосигналов контурного управления знаком (±) хода линейных гидроприводов, пневмоблок А2 первого уровня управления снабжен также двумя пневмоблоками второго уровня управления - пневмоблоком (Б3) глобулярного манипулирования нормалью технологического инструмента и быстрого реагирования на геометрические возмущения и пневмоблоком (Б4) формирования пневмосигналов знака (±) догоняющего поступательного «скольжения» главной гироскопической оси (11) «чистого вращения» для минимизации рассогласования ее параллельности нормали технологического инструмента прецессиями в широтном и нутациями в меридиональном направлении и подключения к доминантности одного из двух взаимно перпендикулярных линейных гидроприводов третьего - гидропривода-корректора пространственного склонения хода рабочего органа, а третий пневмоблок A3 первого уровня управления снабжен тремя пневмоблоками второго уровня управления - пневмоблоком (Б5) путевых пневмоклапанов контроля ходов линейных и поворотных гидроприводов, счетным пневмоблоком (СБ) и пневмопультом (ПУ) ручного наладочного и автоматического управления приводами робота, в том числе при сервисном обслуживании технологического инструмента, и рабочим пультом РП управления пневмоцилиндром поперечной подачи робота консольного исполнения в предварительное рабочее положение.
4. Система по п.3, отличающаяся тем, что в блоке пневмогидравлической логики логический пневмогидроблок (Г1) первого уровня управления снабжен двумя пневмогидроблоками второго уровня управления - стартстопным пневмогидроблоком (Б6) перемены знака (±) направления хода линейных гидроприводов и двухскоростным, двухфронтальным пневмогидроблоком (Б7) автоматического регулирования соотношения величин и градиентов доминантного, дополнительного и корректирующего векторов в прямоугольной и параллелепипедной векторной системе скоростей трех взаимно перпендикулярных линейных гидроприводов, двухскоростного их переключения то на технологическую «медленную», или на маршевую «быструю» скорость холостых ходов, в том числе при мгновенном схемном «заимствовании» в другой фронтальности антиударных рокировок идентичных градиентов для подключения вектора большой косинусной скорости на отдергивание технологического инструмента в случае опасного его сближения с изделием.
5. Система по п.3, отличающаяся тем, что в пневмоблоке А1 пневмоблок (Б1) контурной рокировки поперечных подач на продольную следящую, формирования знака (±) пневмосигналов контурного поворота главной оси «чистого вращения» гироскопа и связи с энергетическим блоком снабжен пятью клапанами «И», входы которых связаны с шестью выходами пневмодатчиков, содержащих блоки щупов, реагирующих на геометрические перемены траектории слежения «с горки» и «на горку» по ходу технологического инструмента - один (И2), формирующий пневмосигнал подачи «поперечно вперед», второй (И1), формирующий пневмосигнал подачи «продольно», и оба, через пневмоклапаны ИЛИ, формирующие поправку «медленно», связи с гидроблоком Г1 (Б7) и с пневмоблоком Б2, третий (И3) и четвертый (И4) пневмоклапаны, формирующие в нечетном и четном полуциклах пневмосигнал «быстро назад» при диагональном рассогласовании совместно включенной пары пневмодатчиков щупов при встрече с впадиной траектории слежения и пневмосигнал на контурный поворот главной гироскопической оси в сторону «провалившегося» «с горки» впереди идущего щупа, и пятый - блокировочный пневмоклапан (И5), формирующий при попадании технологического инструмента в угол по линии биссектрисы при ходе «на горку» пневмосигнал «быстро назад» и на поворот той же главной гироскопической оси в сторону, определяемую направлением слежения за счет изменения положения пневмотриггера 5/2, переключаемого пневмокомандами «нечет» или «чет», систему пневмоклапанов ИЛИ, к которой подключены пневмоблоки четвертого уровня управления: пневмоблок (Е1) переключений системы управления с вертикальной фронтальной плоскости XOZ на горизонтальную XOY и (Е2) - с XOY на XOZ, входы которых связаны с выходами жесткопрограммного пневмоблока Б5 для автоматической переналадки фронтальности и с выходами пульта управления ПУ, а также пневмоблок (Е3) автоматического переключения таймеров с первого электрореле времени, настроенного на один режим работы рабочего органа, на второе электрореле времени, настроенное на другой технологический режим через пневмотриггер (П3) и пневмоэлектрические датчики ПЭД1 и ПЭД2, переключаемые от Б5 пневмокомандами перемены фронтальности системы управления, и снабжен пневмоклапанами включения-выключения двухтактного импульсного пневмогидравлического насоса (ИН) в режиме «автомат» или «наладка» с пульта (ПУ) и включения питания сжатым воздухом блоков щупов и угловых пневмомуфт.
6. Система по п.3, отличающаяся тем, что пневмоблок второго уровня управления Б2 снабжен тремя пневмоблоками третьего уровня управления - первым (В1) цикловых рокировок соучастия и знака (±) направления контурного хода линейных гидроприводов в зависимости от фазового положения угловых пневмомуфт (Мх) 19 и [Mz(y)] 20 на главной оси «чистого вращения» гироскопа, вторым (В2) - автоматической и ручной полуавтоматической переналадки рабочего положения линейных гидроприводов и третьим (В3), состоящим из трех пар пневмоклапанов ИЛИ - вывода с выходов от первых двух пневмоблоков В1 и В2 пар пневмосигналов к логическому пневмогидроблоку Г1.
7. Система по п.3 или 6, отличающаяся тем, что в пневмоблоке второго уровня управления Б2 пневмоблок третьего уровня управления В1 цикловых рокировок соучастия и знака (±) направления контурного хода линейных гидроприводов в зависимости от фазового положения угловых пневмомуфт содержит пневмотриггер К7 и пневмоклапан К8, а также два распределительных двузначных тандема золотников (-4/2+4/2) РТ1 и РТ2, управляемых один пневмокомандами «поперечно-продольно», а другой - пневмокомандами перемены фронтальности, и снабжен блоками золотников - одним (4/2×2) Бз3 и вторым - (4/2×3) Бз4; к правым торцам тандема золотников (-4/2+4/2)РТ1 и блока золотников (4/2×3) Бз3 параллельно подключены линия 77 «продольно» от пневмоблока Б1 и от него же линия 76 «вперед» параллельно к левым торцам блока золотников (4/2×2) Бз3 и пневмотриггера К7, к правому торцу которого подключена линия 78 «назад» от того же пневмоблока Б1, и обе линии «вперед» и «назад» поданы на входы первого пневмоклапана ИЛИ (ИЛИ 31), выход которого в линию «поперечно» подключен к пневмоблоку Б4 и к левому торцу тандема золотников (-4/2+4/2) РТ1, при этом выходы угловых пневмомуфт подключены к левым входам обоих золотников тандема РТ1 от [Mz(y)] 20, а к правым входам обоих золотников тандема РТ1 от (Мх) 19, при этом параллельно к линии управления пневмоклапана 4/2 К8 отведена линия выхода 44 пневмомуфты [Mz(y)] 20, а к входам пневмоклапана К8 присоединена пара линий от пневмоблока Б4 подключения глобулярного дополнительного привода Y к доминантному приводу во фронтальной плоскости XOZ, и во фронтальной плоскости XOY - подключения дополнительного привода Z; входы пневмоклапана И11 присоединены к линии «четно» от счетного пневмоблока СБ и к линии 77 «продольно» от пневмоблока Б1, выход И11 «четно» (203') присоединен к правому торцу блока золотников (4/2×3) Бз4, к левому торцу которого присоединен выход пневмоклапана ИЛИ24, один вход которого (201) «нечет» связан с тем же счетным пневмоблоком СБ, а второй вход - с линией 78 «назад» от пневмоблока Б1.
8. Система по п.3, отличающаяся тем, что в пневмоблоке А2 пневмоблок второго уровня управления Б3 снабжен двумя пневмоблоками третьего уровня управления (В4) и (В5), причем первый пневмоблок В4 - формирования знака (±) «заимствования» в другой фронтальности градиента антиударного косинусного вектора скорости отдергивания технологического инструмента в сторону, противоположную его рабочей подаче, при опасном сближении инструмента с изделием во время установочной поперечной подачи рабочего органа, содержащий два пневмоклапана «И» - один (И12) - конъюнкции пневмосигналов от пневмодатчиков одновременного качания двух главных щупов с лицевой стороны контура слежения, а другой - (И13) - одновременного качания двух вспомогательных щупов с изнаночной стороны контура слежения, выходы пневмоклапанов И12 и И13 присоединены к одинарным входам распределительного двузначного тандема золотников с функцией «то…, то» обратного подключения (-3/2+3/2) РТ3-1, управляемого с выходов пневмотриггера 4/2 (П9), парные левые выходы двух золотников тандема - плюс и минус - присоединены к паре входов «Y», а парные правые - перекрестно - к паре входов ±«Z» двух пневмоблоков (Е4 и Е5) четвертого уровня управления линейными гидроприводами Y и Z в пневмоблоке Б2, при этом от выходов пневмотриггера 4/2 П9 параллельно выведены линии мгновенного переключения фронтальности к пневмогидроблоку Г1, и второй пневмоблок (В5) - удержания нормали технологического инструмента к касательной волновой кривизны траектории слежения и быстрого увеличения зазора между изделием и технологическим инструментом при встрече с выпуклостью или впадиной во время продольной подачи, содержит пневмоклапаны «ИЛИ» реагирования на неодновременное качание щупов с лицевой или изнаночной стороны контура слежения, при этом от одной группы пневмоклапанов ИЛИ пара выходов соединена с пневмогидроблоком Г2 поворотных гидроприводов, а именно с гиродвигателем манипулирования нормалью технологического инструмента гироскопа, а от второй группы пневмоклапанов ИЛИ - к рабочему органу, содержащему привод рабочей подачи и дополнительного отвода технологического инструмента при встрече с выпуклостью или впадиной траектории слежения.
9. Система по п.3, отличающаяся тем, что пневмоблок Б4 снабжен двумя пневмоблоками третьего уровня управления (В6) и (В7), причем первый пневмоблок В6 - рокировки доминантности продольной и поперечной подач широтного и меридионального склонения хода рабочего органа, содержащий распределительный двузначный тандем золотников (-3/2+3/2) РТ2 с функцией «то…, то» прямого подключения, управляемый через пневмотриггер 4/2 (П10) пневмосигналами с выходов шестилинейной угловой пневмомуфты (Мз)21, задающей широтные или меридиональные направления слежения, на главной гироскопической оси (11) «чистого вращения», к левым входам его золотников подключены выходы угловой пневмомуфты на оси прецессий [Mβy(z)] 23, а к правым - выходы угловой пневмомуфты [Mαy(z)] 22 на оси нутаций гироскопа, при этом параллельно эти же пары выходов угловых пневмомуфт на оси прецессий и нутаций поданы через два клапана «ИЛИ» к торцевым линиям переключения двух пневмоклапанов «И» (И9 и И10), к нормально закрытым линиям которых подключены выходы пневмотриггера 4/2 (П10), управляемого слева пневмосигналом «поперечно» (76/78), а справа - пневмосигналом 77 «продольно» от пневмоблока Б1 через пневмоблок Б2, выходы пневмоклапанов И (И9 и И10) - 154-155 и линии 152-153 рокировки доминантности подач «продольно»-«поперечно» с выходов пневмотриггера 4/2 (П10) поданы к пневмогидроблоку Б7 пневмогидроблока Г1, а одинарные выходы двузначного тандема РТ2 подключены к управлению доминантными взаимно перпендикулярными гидроприводами то X-Z, в вертикальной фронтальной плоскости XOZ, то X-Y - в плоскости XOY как дополнительные приводы - соответственно то X, то Z в пневмоблоке Б2; второй пневмоблок - В7 - догоняющего «скольжения» главной гироскопической оси 11 «чистого вращения», выполняемого нутациями и прецессиями для минимизации ее непараллельности наклону нормали технологического инструмента перпендикулярно касательной к волновому изгибу траектории слежения, содержащий распределительный двузначный тандем золотников с функцией «то…, то» (-3/2+3/2) РТ3-2 обратного подключения, управляемый параллельными линиями с выходов шестилинейной угловой пневмомуфты (Мз)21, задающей меридиональные и широтные склонения хода рабочего органа, к одинарным входам распределительного тандема РТ3-2 подключены выходы угловой пневмомуфты (Мωк) 18 на оси манипулирования нормалью технологического инструмента, а парные двузначные выходы через две пары пневмоклапанов ИЛИ присоединены к пневмогидроблоку Г2 - поворотных гидроприводов, причем от левых выходов тандема (-3/2+3/2) РТ3-2 к гидроприводу прецессий (ГДβ) 17, а от правых - к гидроприводу нутаций (ГДα) 16 гироскопа, и через те же пары пневмоклапанов ИЛИ от соответствующих выходов пневмопульта управления ПУ для наладочных прецессий и нутаций; при этом пневмоблок В7 снабжен пневмоблоком Е8 четвертого уровня управления автоматической переналадкой фазы предварительного рабочего положения оси 12 прецессий через пару пневмоклапанов «НЕ 12» и «НЕ 14», переключаемых пневмокомандами путевых пневмоклапанов ВК20 и ВК21 поворотом кулачка 171 на той же оси 12 прецессий в пневмоблоке Б5 через правые входы дополнительных пневмоклапанов «ИЛИ» 54 и 55.
10. Система по п.3, отличающаяся тем, что в пневмоблоке A3 пневмоблок Б5 снабжен единой системой путевых пневмодатчиков контроля ходов линейных и поворотных приводов как для консольного, так и для портального исполнения адаптивного робота, причем в последнем варианте трехкоординатная тележка перевернута гироскопом вниз, чем обусловлен плюсовой знак координаты Z ниже нулевой координатной точки, при этом в роботе консольного исполнения он снабжен пневмоцилиндром подвода трехкоординатной тележки к изделию на конвейере, а для робота портального исполнения предусмотрена подача изделия под рабочий орган гироскопа на сборочной тележке с ходами челночного типа, контролируемой путевыми пневмодатчиками, причем у робота консольного исполнения он снабжен пневмопультом РП пуска в работу, а у робота портального исполнения - двумя ручными пневмораспределителями 5/2, при этом также снабжен регулируемыми упорами-кулачками переключения путевых пневмоклапанов 3/2 контроля достижения точки предварительного рабочего положения (ТПРП) у начала траектории слежения; снабжен путевым пневмоклапаном 5/2 (ВК7), связанным со счетным пневмоблоком СБ при работе по разомкнутой и замкнутой траектории слежения и тремя пневмоблоками Е9, Е10 и Е11 четвертого уровня управления автоматической переналадкой робота для однофронтальной и двухфронтальной работ.
11. Система по п.4, отличающаяся тем, что пневмогидроблок Б7 второго уровня управления в пневмогидроблоке Г1 снабжен пневмогидрораспределителями - гидроблоком-триггером золотников (3/2×3) ГБз1 с двухскоростной функцией «медленно-быстро», управляемым справа пневмокомандой 182 «медленно», а слева - пневмокомандой 78 «быстро» от логического пневмоблока Б1, двумя пневмогидроаппаратами глобулярного склонения хода рабочего органа - отдельным 3/2 Гр4 НЕ, переключаемым пневмокомандой 154 «широтно», «псевдоширотно», и пневмогидроблоком золотников (3/2×2)ГБз2 НЕ, переключаемым пневмокомандой 155 «меридионально» - оба от логического пневмоблока Б4, при этом он снабжен пневмогидроблоком-триггером золотников (4/2×2) ГБз3 с функцией рокировок фронтальности, управляемым без антиударного «заимствования» другой фронтальности справа пневмокомандой «XOZ» и слева - пневмокомандой «XOY» от пневмоблока Б3, и отдельным пневмогидротриггером 4/2 Гр5 с функцией контурного переключения доминантности подач в плоской векторной системе X-Z или X-Y, управляемым справа пневмокомандой 153 «продольно», а слева - пневмокомандой 152 «поперечно» от пневмоблока Б4, причем векторные градиенты и величины скоростей доминантных, дополнительных и корректирующих подач линейных гидроприводов обеспечены соединением левых входов «Д» их гидрораспределителей 4/3 пневмогидроблока Б6 с выходами синусно-косинусных гидродатчиков гидрорезольверов на осях гироскопа - от гидрорезольвера (Грзγ)33 на главной гироскопической оси «чистого вращения» - к входам Гр5 - левому от выхода гидродатчика (sinγx) 25 и перекрестно к нормально открытому входу Гр4, а к правому - от выхода гидродатчика [cosγz(y)] 26 и через Гр5 перекрестно - к правому входу правого золотника ГБз3 через Гр5, от гидрорезольвера (Грзα)34 на оси нутаций - к входам левого золотника ГБз3 - к левому его входу от выхода гидродатчика [sinαy(z)] 28, а к правому входу того же левого золотника ГБз3 от выхода гидродатчика [cosαy(z)] 29 и от гидрорезольвера (Грзβ) 35 на оси прецессий - к левому входу правого золотника ГБз3 от выхода гидродатчика [sinβy(z)]31, а от выхода гидродатчика (cosβx)32 к нормально закрытому входу Гр4, при этом левые выходы двух золотников ГБз3 присоединены к паре входов левого золотника ГБз2, а правые - к паре входов правого золотника того же ГБз2, к каждой паре входов золотников (3/2×3) ГБз1 подключены регулируемые гидросопротивления - слева Rм - маршевого быстрого хода, а справа Rш - шагового «медленного» хода гидропривода, причем левые и правые гидросопротивления настроены на одинаковую или быструю, или медленную скорость хода для всех трех линейных гидроприводов, каждая пара гидросопротивлений параллельно соединена одной линией, причем первая и вторая - с выходом золотников НЕ (ГБз2), а третья - с выходом НЕ (Гр4), нормальнооткрытые входы ГБз2 НЕ присоединены к выходам правого золотника ГБз3, нормальнозакрытые - к выходам левого золотника того же ГБз3, а входы гидродатчиков 25-26, 28-29 и 31-32 присоединены к магистральной линии «Д».
12. Система по п.3, отличающаяся тем, что счетный пневмоблок СБ снабжен двумя четырехкомандными двоичными счетными пневмоблоками - один ДБ1 - отсчета нечетных и четных полуциклов возвращения закрученных коммуникаций рабочего органа в незакрученное состояние и второй ДБ2 - отсчета двойных ходов путевого пневмоклапана 5/2 ВК7 в жесткопрограммном пневмоблоке Б5 при работе во фронтальной плоскости XOY слежения по замкнутому контуру - в обоих случаях с выдачей цветового и/или звукового сигнала вызова рабочего-оператора для повторения очередного идентичного технологического перехода производственной операции.
13. Система по п.3, отличающаяся тем, что на рабочий орган из пульта управления ПУ вынесен пневмотумблер 5/2 Т7 наладочного отвода пары блоков щупов и пневмодатчиков, которыми прикрыт доступ к сервисному обслуживанию технологического инструмента, например, в виде сварочных клещей и возвращения той же пары блоков щупов и пневмодатчиков в рабочее положение, причем нормальнооткрытая в атмосферу линия выхода пневмотумблера Т7 через первый ИЛИ4 из трех пневмоклапанов «ИЛИ» - к большому торцу дифференциального воздухораспределителя 5/2 ДПР3 управления пневмоцилиндром-фиксатором (ПЦ5) 40 рабочего положения одной или другой пары блоков щупов и пневмодатчиков, а нормальнооткрытый выход пневмотумблера Т7, в положении «автомат», соединенный с линией питания сжатым воздухом, подключен к большим торцам двух блокировочных дифференциальных воздухораспределителей 3/2 ДП1 и ДП2, в режиме «автомат» выполняющих роль логического элемента «НЕ» в подключении к большим торцам воздухораспределителей ДПР1 и ДПР2 обеих пар пневмоцилиндров (ПЦ3) 38 и (ПЦ4) 39 подвода-отвода пар блоков щупов и пневмодатчиков Щ1 и Щ2 линий выходов пары путевых пневмодатчиков 3/2 ВК14 и ВК15, одновременно переключаемых отводом пневмоцилиндра-фиксатора (ПЦ5) 40 и питаемых поочередно сжатым воздухом от пневмотриггера 5/2 П1, управляемого пневмокомандами XOY-XOZ (165'-166') от пневмоблока Б5, при этом выходы пары путевых пневмодатчиков ВК14 и ВК15 раздвоены - одна линия напрямую через один блокировочный воздухораспределитель 3/2, а другая - к малому торцу другого такого же блокировочного воздухораспределителя, а входы второго пневмоклапана ИЛИ5 «подвода» подключены к выходам путевых пневмодатчиков 3/2 ВК16 и ВК29, контролирующих окончание подвода блоков щупов и пневмодатчиков в рабочее положение к технологическому инструменту, а входы третьего пневмоклапана ИЛИ 3 «отвод» пневмоцилиндров 38 и 39 подключены к выходам путевых пневмодатчиков 3/2 ВК17-ВК28, контролирующих окончание отвода блоков щупов и пневмодатчиков от технологического инструмента, и параллельно - к малым торцам воздухораспределителей ДПР1 и ДПР2 управления пневмоцилиндрами отвода-подвода пар блоков щупов и пневмодатчиков Щ1 и Щ2, причем выход второго пневмоклапана ИЛИ5 «подвод» подключен к малому торцу воздухораспределителя 5/2 ДПР3 и параллельно - к нормальнозакрытой линии первого пневмоклапана ДА1, нормальнооткрытая в атмосферу линия которого соединена с большим торцем блокировочного дифференциального пневмоклапана ДП3 автоматического отвода пневмоцилиндра-фиксатора (ПЦ5) 40 переключением через первый пневмоклапан ИЛИ4 вправо воздухораспределителя ДПР3 пневмокомандой 170' окончания работы в вертикальной фронтальной плоскости XOZ от пневмотриггера ВК26П или пневмокомандой 169' - в горизонтальной фронтальной плоскости XOY от пневмотриггера ВК27П пневмоблока Б5, а выход третьего пневмоклапана ИЛИ3 подключен к нормальнозакрытому входу второго пневмоклапана ДА2, нормальнооткрытая в атмосферу линия выхода которого соединена с линией управления первым пневмоклапаном ДА1, линия же управления ДА2 - с выходом путевого пневмоклапана НЕ3, контролирующего окончание фиксации пары блоков щупов и пневмодатчиков Щ1 или Щ2 пневмоциндром-фиксатором (ПЦ5) 40.
14. Система по п.1, отличающаяся тем, что технологический инструмент рабочего органа, содержащего привод рабочей подачи и дополнительного отвода технологического инструмента от изделия, например, в виде штоковых сварочных клещей (Цк) с С-образной скобой, содержащих соосный блок двух пневмоцилиндров сжатия электродов - силовой и предсжатия, который, как и силовой, помимо рабочего поршня, жестко соединенного со скобой полым плунжером, снабжен вторым - сервисным поршнем дополнительного отвода скобового электрода от изнаночной стороны фланцевого сварного соединения за счет хода этого второго сервисного поршня от заплечика центральной втулки, жестко соединенной, в отличие от центральной втулки силового пневмоцилиндра, с передней крышкой блока двух соосных пневмоцилиндров, при этом дополнительный отвод скобового электрода от изнаночной стороны фланцевого соединения изделия предусмотрен переключением второго пневмоклапана НЕ, управляемого, как «первый» пневмоклапан НЕ, от пневмоблока Б3, как и для дополнительного отвода штокового электрода от лицевой стороны того же фланцевого соединения, причем линия рабочего хода цилиндра предсжатия присоединена к выходу отдельного дополнительного пневмораспределителя 3/2 Кпс (Э1) через канал в штоке поршня силового пневмоцилиндра.
| УПРОЩЕННЫЙ АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2001 |
|
RU2208513C2 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| ПАРИТЕТНЫЙ РАСПОЗНАВАТЕЛЬ | 2003 |
|
RU2230357C1 |
| US 4986074 A, 22.01.1991 | |||
| DE 3800990 A1, 27.07.1989. | |||

