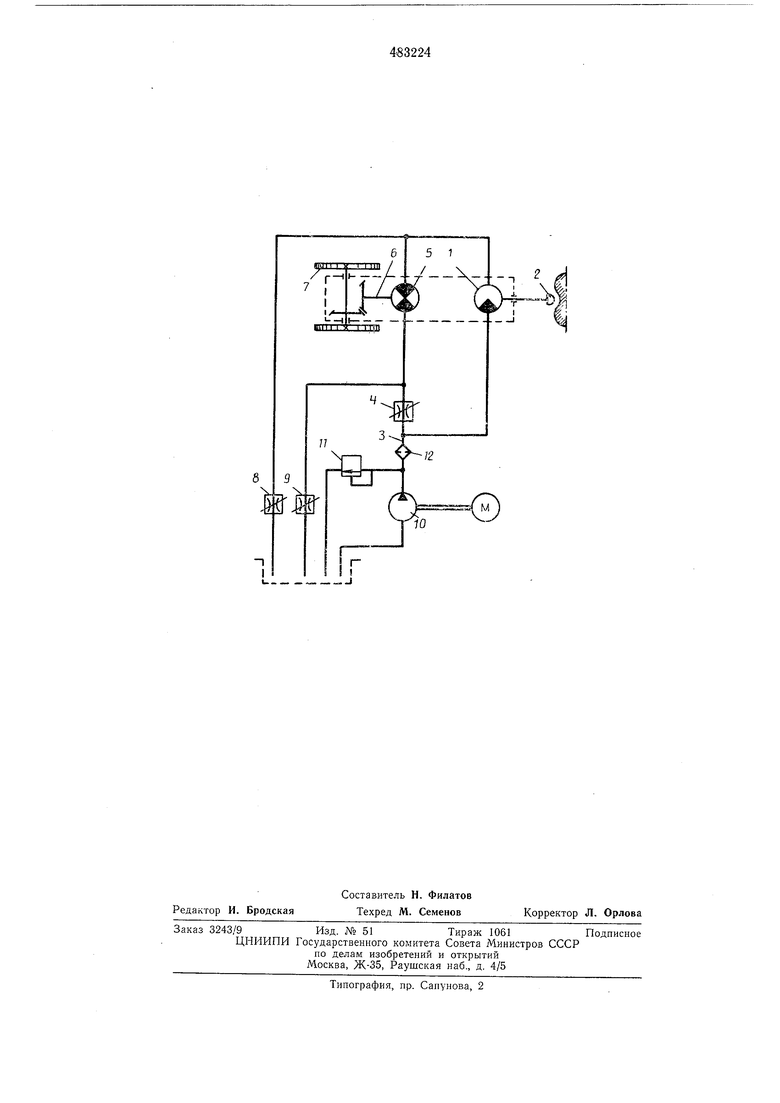
гидромотора 5 в сливные линии гидромотора
Iи регулятора режимов 4 включены дроссели о и 9, регулируемые на расчетные расходы в зависимости от заданного режима, нанример заданной глубины резания.
Подача масла в систему 3 осуществляется гидронасосом 10, после которого последовательно включены нредохранительный клапан
I1и фильтр 12.
Устройство работает следующим образом.
При включении в работу гидронасоса 10 постоянной производительности по гидросистеме 3 к напорным линиям регулятора режимов 4 и гидромотора 1 подается рабочая жидкость (масло). В зависимости от необходимого режима обработки поверхности детали, например необходимой глубины резания, гидросопротивление регулятора режимов 4 устанавливают меньшим гидросопротивления гидромотора 1 на величину, необходимую и достаточн ю для создания на рабочем органе 2 соответствующего момента сопротивления.
Так как контакт рабочего органа 2 с обрабатываемой поверхностью отсутствует в начальный момент работы устройства, а значит отсутствует и момент сопротивления на рабочем органе, то, следовательно, гидросопротивление гидромотора 1 будет меньше гидросопротивления регулятора режимов 4. Это приводит к тому, что расход масла через гидромотор 1 будет много больше расхода через регулятор 4 и больше расхода через дроссель 8, соответствующего в свою очередь определенному расходу через дроссель 9.
Часть масла, равная разности действительного его расхода, через гидромотор 1 и возможно для определенного режима через дроссель 8, поступит через верхнюю полость реверсируемого гидромотора 5 в нижнюю и через дроссель 9 - на слив. Вследствие прохождения масла через полости реверсируемого гидромотора 5 его вал будет нагружен соответствующим крутящим моментом. Это сделает возможным поперечную подачу рабочего органа 2 в направлении к обрабатываемой поверхности с помощью механизма 7.
По мере внедрения рабочего органа 2 в обрабатываемую поверхность им воспринимается все более увеличивающийся момент соиротивления внедрению. При достижении моментом сопротивления величины, отвечающей заданной глубине резания и при которой гидросопротивление гидромотора 1 будет соответствовать установленному для данного режима гидросопротивлению регулятора режимов 4 для вала 6 реверсируемого гидромотора 5, наступит период динамического равновесия. Этот период ..арактеризуется тем, что с одной стороны вал 6 будет нагружен крутящим моментом, создаваемым давлением масла в верхней полости гидромотора 5, а с другой стороны этот крутящий момент будет уравновешен двумя моментами, действующими на
вал 6,- крутящим, создаваемым давлением масла в нижней иолости гидромотора 5 и моментом сопротивления кручению, воспринимаемым от механизма поперечной подачи 7. Следовательно, период динамического равновесия будет соответствовать определенному моменту сопротивления на рабочем органе 2, в свою очередь соответствующего определенному режиму работы, например определенной
глубине резания.
При нарущении динамического равновесия (например, из-за возрастания момента сопротивления на рабочем органе вследствие увеличения кривизны обрабатываемой поверхности) вал 6 начнет вращаться в направлении, обратном направлению вращения его при холостом ходе, т. е. рабочий орган 2 посредством механизма поперечной подачи 7 будет выводиться из зоны увеличивающейся кривизны до тех пор, пока на валу 6 опять не наступит динамическое равновесие.
Таким образом, при работе устройства происходит автоматическое слежение за криволинейной поверхностью и обеспечивается снятие
слоя материала равномерной толщины, причем достигается это за счет наличия внутренней отрицательной обратной связи по величине и знаку приращения, действующего на рабочий орган 2 момента сопротивления относительно расчетного.
Устройство может работать как при неподвижной, так и при перемещающейся детали. Какой-либо другой вид перемещения рабочего органа 2 в пространстве, кроме рассмотренного - поперечной подачи, достигается воздействием на устройство отдельных приводов обычного типа.
Предмет изобретения
Устройство для стабилизации толщины снимаемого слоя при механической обработке криволинейных поверхностей, имеющее механизмы для осуществления заданных перемещений рабочего и вспомогательных органов и включающее электродвигатель, гидронасос постоянной производительности, предохранительный клапан, фильтр, маслобак, напорную и сливные линии, отличающееся тем, что,
с целью автоматического слежения за изменением профиля поверхности и поддержания определенной наперед заданной толщины снимаемого слоя обрабатываемой детали, а также упрощения коиструкции, в напорную
линию гидронасоса включены параллельно между собой регулируемый дроссель и гидромотор, вал которого связан с рабочим органом, а между сливными линиями гидромотора и регулируемого дросселя включен реверсируемый гидромотор, после которого на сливпых линиях установлены дроссели, причем вал реверсируемого гидромотора кинематически связан с механизмом подачи рабочего органа.
Н)
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина | 1975 |
|
SU600307A1 |
| СПОСОБ БУРЕНИЯ ПОРОДЫ С ПЕРЕМЕННЫМИ СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582691C1 |
| Гидропривод бурового станка | 1987 |
|
SU1460235A1 |
| Гидросистема промышленного робота | 1986 |
|
SU1318392A1 |
| Бурильная машина | 1984 |
|
SU1232795A1 |
| Способ интенсификации процесса резания | 1979 |
|
SU929331A1 |
| ПРИВОД НЕЗАВИСИМОГО ВАЛА ОТБОРА МОЩНОСТИ ТЯГОВО-ТРАНСПОРТНЫХ СИСТЕМ | 1999 |
|
RU2162798C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ КАЧЕСТВОМ ОБРАБОТКИ ПОЧВЫ ФРЕЗОЙ | 1995 |
|
RU2088062C1 |
| Землеройно-мелиоративная машина | 1974 |
|
SU613027A1 |
| Сельскохозяйственная машина, преимущественно капустоуборочная | 1987 |
|
SU1496692A1 |