(54) ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ТКАЦКОМУ СТАНКУ К МНОГОЗЕВНОМУ
ных датчиков 14. Один датчик служит для размыкания цепи электромагнитов 15 для поворота рычага 11, а другой обеспечивает отключение электромагнита для дальнейшего переключения перфорированной ленты в считывающем механизме. Соединяются датчики со считывающим механизмом при помощи линии 16 и штеккера 17.
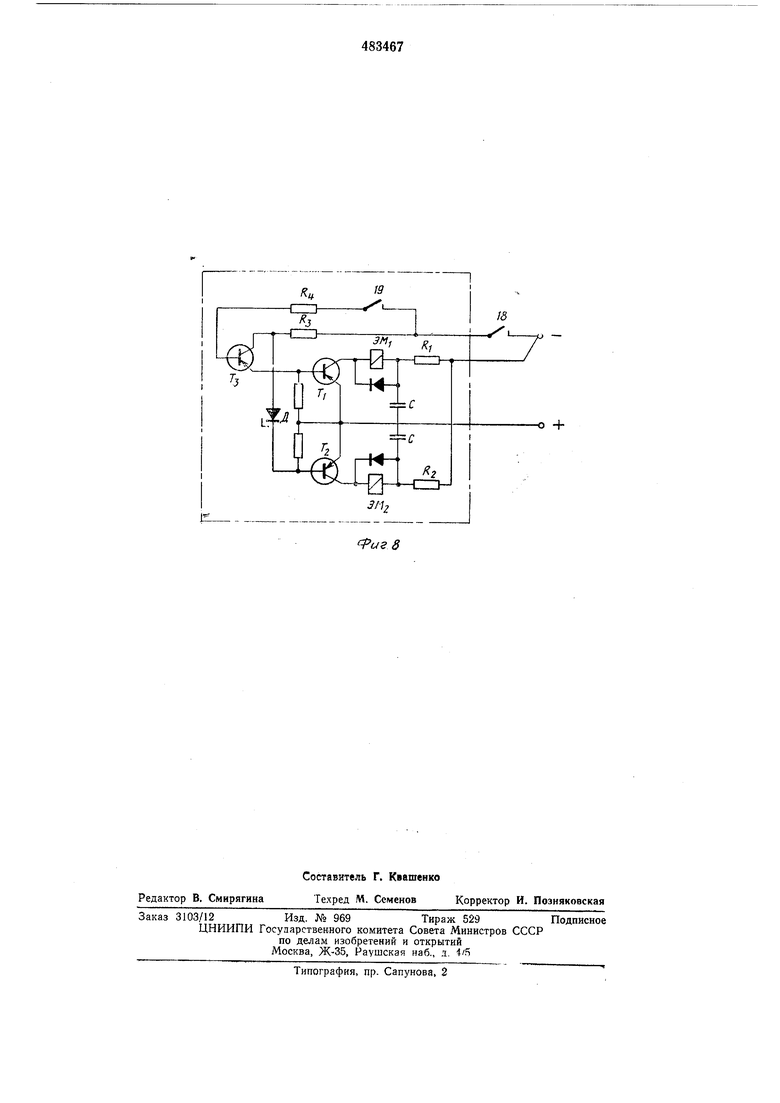
При переработке информации блоком управления электромагниты 3Mi и ЭМ2 поворачивают рычаг 3. Эти электромагниты связаны с сопротивлениями и 2 и переключающими транзисторами TI и Т с источником постоянного тока. Транзисторы TI и Гз могут работать как включателями, так и выключателями. В зависимости от открытого или закрытого положения контакта 18 датчика замыкается либо цепь с транзистором TI, либо цепь с транзистором 72- При открытом положении контакта 18 датчика при условии одновременного закрытого положения управляющего контакта 19 ток протекает через резистор RZ и полупроводниковый стабилизатор D на вход базы транзистора Т. В результате притягивается электромагнит ЭМ2. Транзисторы TI и TZ при этом закрыты, т. е. обесточены. Наоборот, при закрытом положении контакта 18 базисный ток протекает через резистор 4 и транзисторы Гз и TI. При этом срабатывает электромагнит ЭМь Одновременно с этим отрицательный потенциал между резистором и транзистором Тз так низок, что напряжение полупроводникового стабилизатора не повышается, поэтому транзистор TZ и электромагнит ЭМ2 не проводят тока.
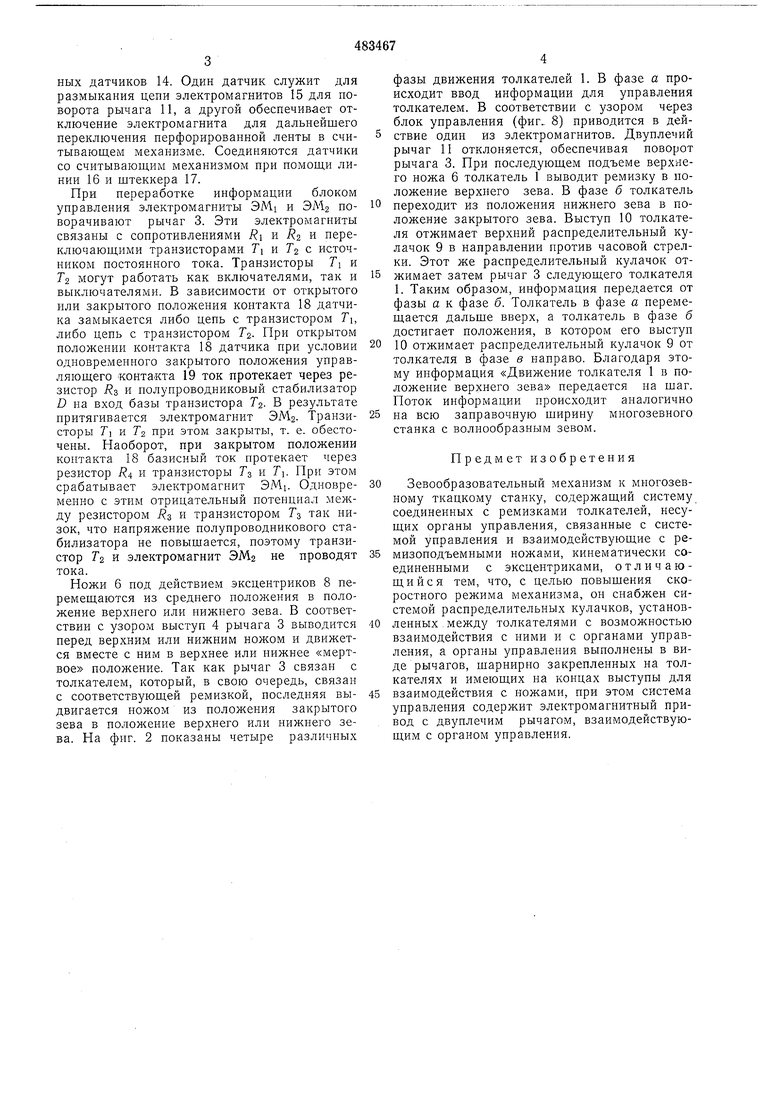
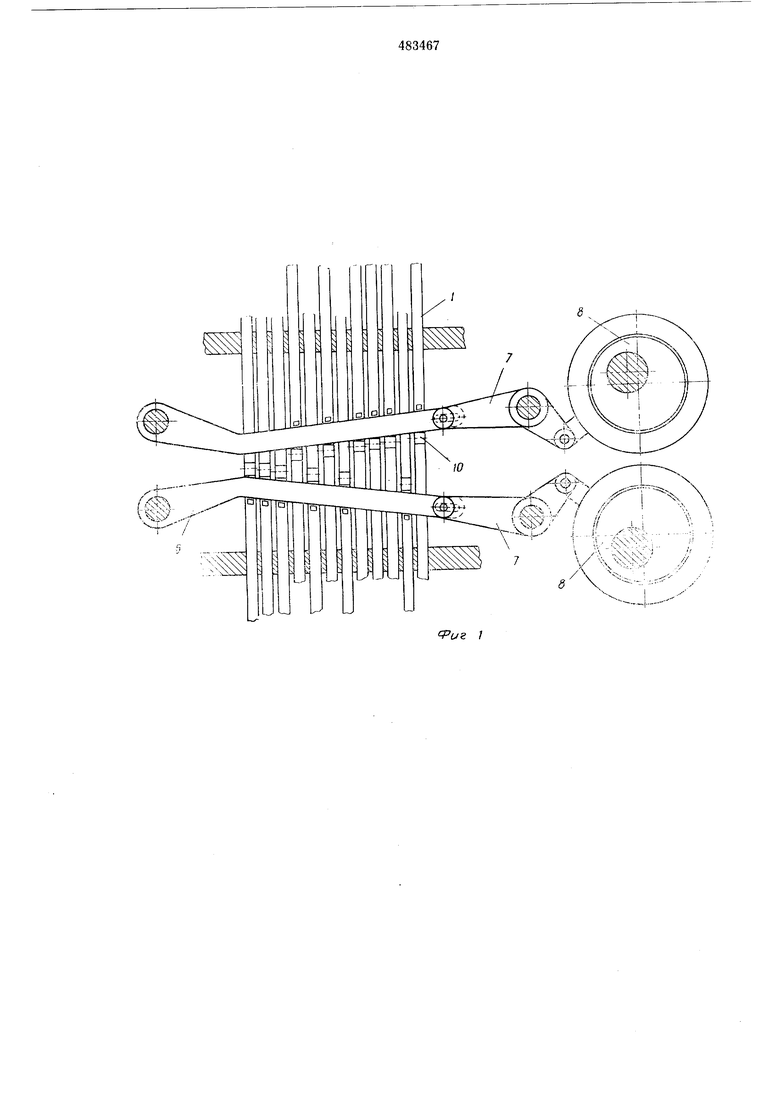
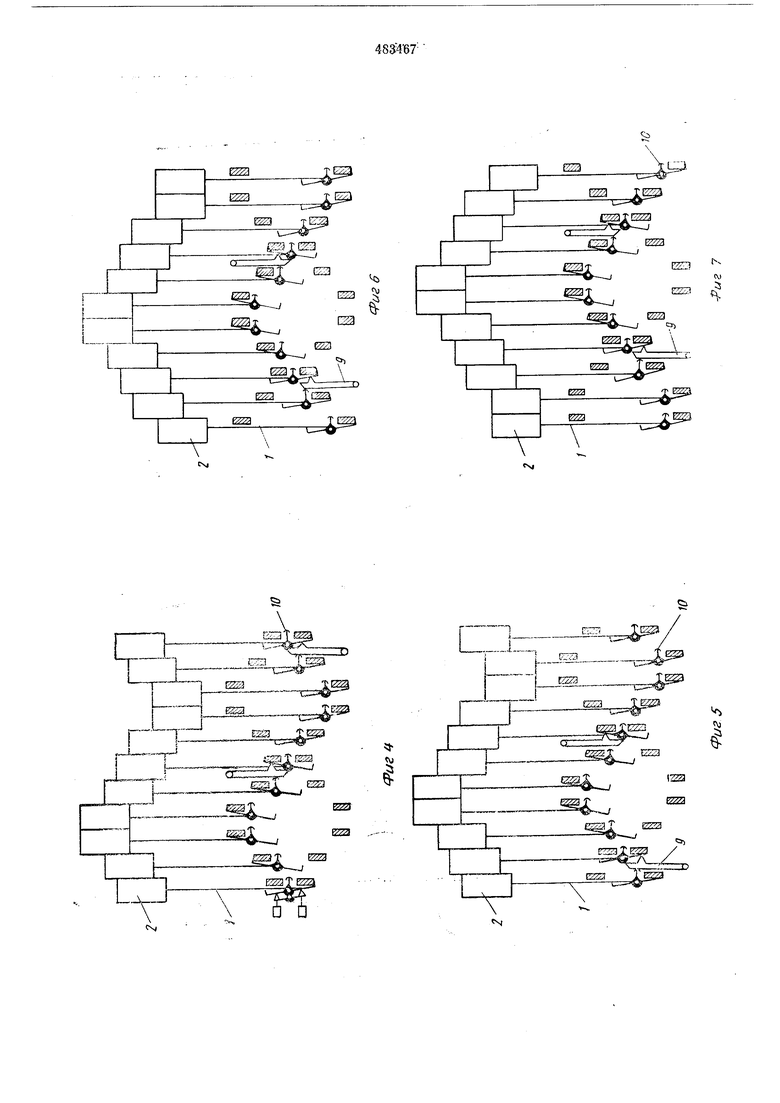
Ножи 6 под действием эксцентриков 8 перемещаются из среднего положения в положение верхнего или нижнего зева. В соответствии с узором выступ 4 рычага 3 выводится перед верхним или нижним ножом и движется вместе с ним в верхнее или нижнее «мертвое положение. Так как рычаг 3 связан с толкателем, который, в свою очередь, связан с соответствующей ремизкой, последняя выдвигается ножом из положения закрытого зева в положение верхнего или нижнего зева. На фиг. 2 показаны четыре различных
фазы движения толкателей 1. В фазе а происходит ввод информации для управления толкателем. В соответствии с узором через блок управления (фиг.. 8) приводится в действие один из электромагнитов. Двуплечий рычаг 11 отклоняется, обеспечивая поворот рычага 3. При последующем подъеме верхнего ножа 6 толкатель 1 выводит ремизку в положение верхнего зева. В фазе б толкатель переходит из положения нижиего зева в положение закрытого зева. Выступ 10 толкателя отжимает верхний распределительный кулачок 9 в направлении против часовой стрелки. Этот же распределительный кулачок отжимает затем рычаг 3 следующего толкателя 1. Таким образом, информация передается от фазы а к фазе б. Толкатель в фазе а перемещается дальше вверх, а толкатель в фазе б достигает положения, в котором его выступ 10 отжимает распределительный кулачок 9 от толкателя в фазе в направо. Благодаря этому информация «Движение толкателя 1 в положение верхнего зева передается па шаг. Поток информации происходит аналогично на всю заправочную ширину многозевного станка с волнообразным зевом.
Предмет изобретения
Зевообразовательный механизм к многозевному ткацкому станку, содержащий систему соединенных с ремизками толкателей, несущих органы управления, связанные с системой управления и взаимодействующие с ремизоподъемными ножами, кинематически соединенными с эксцентриками, отличающийся тем, что, с целью повышения скоростного режима механизма, он снабжен системой распределительных кулачков, установленных, между толкателями с возможностью взаимодействия с ними и с органами управления, а органы управления выполнены в виде рычагов, шарнирно закрепленных на толкателях и имеющих на концах выступы для взаимодействия с ножами, при этом система управления содержит электромагнитный привод с двуплечим рычагом, взаимодействующим с органом управления.
- -J
rrl :.
1 rwi
ri IH HI
I 1M Mn M IMW
L, I in 11 0,., I i-/И i L.J p MjLJ| I ( V-j | Vij
., p Irijir..; .j h W A
. jli
C,-I I я /Г: /i, / . i/ IT n
fNff rii lir
/11 t--JJ Uri .i ra
/
I
.,. C
- /J
usJ
Cxi
«Sj
о +
сриг 8