Настоящее изобретение касается зевообразовательного механизма и ткацкого станка, оборудованного таким механизмом.
В ткацком станке типа Жаккарда зевообразовательный механизм избирательно приподнимает ремизки, каждая из которых содержит глазок, через который проходит нить основы, при этом в зависимости от положения крючка, к которому прикреплен верхний конец ремизки, данная нить располагается сверху или снизу уточной нити, перемещаемой станком. Такой механизм, описанный, например, в ЕР-А-0219437, содержит подвижные крючки, каждый из которых содержит боковой мысок, выполненный с возможностью взаимодействия с ножами, совершающими противоположные по фазе вертикальные возвратно-поступательные движения. Каждый подвижный крючок содержит изогнутый конец, предназначенный для его остановки путем взаимодействия форм с удерживающим рычагом.
Каждый подвижный крючок оснащен также упругим язычком, выполненным заодно с крючком и предназначенным для управления перемещением удерживающего рычага. Такой язычок подвергается многократному воздействию интенсивных усилий, которые могут вызывать его постоянную деформацию ползучести и даже его разрыв. В этом случае образующийся зев имеет (дефекты).
Настоящее изобретение призвано устранить эти недостатки, для чего предлагается зевообразовательный механизм с крючками высокой прочности и точными размерами, что обеспечивает надежную работу станка, при этом крючки являются компактными по высоте, то есть параллельно направлению их перемещения. Это позволяет создать малогабаритный станок, благодаря чему происходит выигрыш в пространстве и в материальных ресурсах.
В этой связи настоящее изобретение касается зевообразовательного механизма для ткацкого станка типа Жаккарда, при этом указанный механизм содержит подвижные крючки, каждый из которых перемещается ножом от положения верхней мертвой точки, в которой или рядом с которой каждый крючок может быть остановлен избирательным устройством, до положения нижней мертвой точки, при этом каждый подвижный крючок содержит корпус с выполненным в нем мыском, предназначенным для упирания в указанный нож. Данный механизм отличается тем, что каждый крючок дополнительно содержит металлическую пластину, предназначенную для взаимодействия с избирательным устройством и закрепленную на указанном корпусе в зоне корпуса, противоположной избирательному устройству, с возможностью отклонения относительно корпуса по отношению к зоне корпуса, в которой выполнен мысок.
В соответствии с настоящим изобретением двухкомпонентная конструкция подвижных крючков, корпус которых предпочтительно выполнен из синтетического материала, обеспечивает прочность корпуса при механическом взаимодействии между крючком и ножом, и в то же время геометрическая конфигурация металлической пластины выполнена с высокой степенью точности, что обеспечивает достаточную надежность взаимодействия между подвижным крючком и избирательным устройством. Поскольку металлическая пластина закреплена на корпусе в нижней части при конфигурации, когда крючок находится на работающем механизме, упругость пластины практически по всей ее высоте может быть использована для поперечного перемещения той ее части, которая предназначена для взаимодействия с соответствующей частью избирательного устройства. Возможность относительного отклонения между пластиной и корпусом достигается благодаря гибкости пластины и/или гибкости корпуса.
Согласно предпочтительным, но не обязательным вариантам настоящего изобретения этот механизм может содержать один или несколько признаков, отраженных в зависимых пунктах формулы изобретения.
В частности, электромагнит избирательного устройства может быть запрессован в одну из сторон кожуха для установки и направления поступательного движения крючка. Благодаря такому литью достигается точное позиционирование электромагнита по отношению к другим рабочим деталям устройства, таким как оси удерживающих рычагов, упоры и опоры этих рычагов, а также направляющие пазы подвижных крючков. Благодаря такой высокой точности можно уменьшить амплитуду движений подвижных деталей, в частности качания удерживающих рычагов, и изгиба пластин подвижных крючков. Это также позволяет уменьшить габариты механизма.
Настоящее изобретение касается также ткацкого станка, оборудованного описанным выше зевообразовательным механизмом.
Корпус выполнен из синтетического материала и соединен путем запрессовки с частью указанной пластины.
Корпус выполнен упругим до такой степени, чтобы иметь возможность адаптироваться к возможному нарушению относительного положения или параллельности соответственных траекторий указанного корпуса и ножа, в который упирается его мысок.
Пластина выполнена с возможностью воздействия на подвижный рычаг избирательного устройства усилием упора в электромагнит управления поворотом указанного рычага.
Пластина содержит окно, в которое заходит по меньшей мере часть корпуса.
Пластина содержит по меньшей мере одно отверстие, в которое заходит избирательный мысок, являющийся частью указанного избирательного устройства.
Пластина имеет две стороны, выполненные с возможностью перемещения путем скольжения в пазах кожуха для установки в нем и направления поступательного движения подвижного крючка, при этом корпус таким образом позиционируется по отношению к указанному кожуху.
Паз расширен или выполнен открытым в наружную сторону указанного кожуха вблизи указанного избирательного устройства.
Удерживающее устройство содержит по меньшей мере один удерживающий рычаг, при этом указанный рычаг содержит металлическую арматуру, выполненную с возможностью взаимодействия с электромагнитом для управления положением указанного рычага, и немагнитную рельефную часть, выполненную с возможностью взаимодействия с металлической пластиной и закрепленную на указанной арматуре.
Удерживающий рычаг установлен с возможностью поворота вокруг неподвижной оси, относительно которой он полностью направлен вниз в рабочем состоянии указанного механизма.
Удерживающий рычаг содержит по меньшей мере один отражатель, выполненный с возможностью изолирования от внешнего пространства камеры, в которой расположена зона взаимодействия между указанной арматурой и электромагнитом.
Указанный или один из указанных отражателей выполнен по обе стороны от основной части указанного рычага.
Указанный или один из указанных отражателей расположен между камерой и крючком, смежным с рычагом.
Удерживающий рычаг установлен с возможностью поворота вокруг оси, неподвижной относительно кожуха, изолирующего электромагнит от окружающей атмосферы, при этом удерживающий рычаг расположен одновременно внутри и снаружи указанного кожуха, при этом уплотнительные средства выполнены между указанным кожухом и круглой частью указанного удерживающего рычага, установленной практически с центром на указанной оси.
Настоящее изобретение и его преимущества будут более очевидны из нижеследующего описания трех вариантов выполнения зевообразовательного механизма согласно изобретению, приведенного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - принципиальная схема ткацкого станка типа Жаккарда, в котором применено настоящее изобретение.
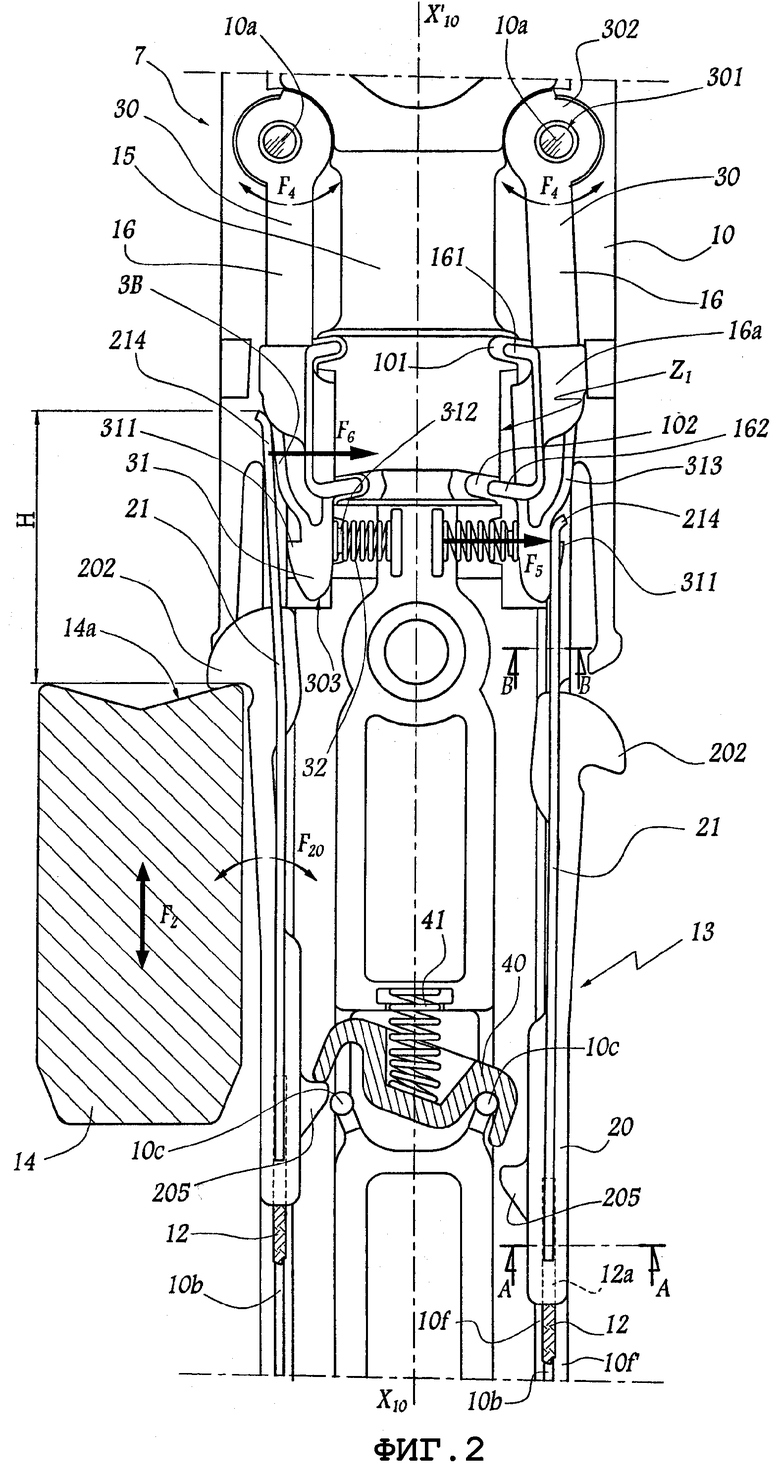
Фиг.2 - увеличенное изображение в продольном разрезе зевообразовательного механизма станка, показанного на фиг.1.
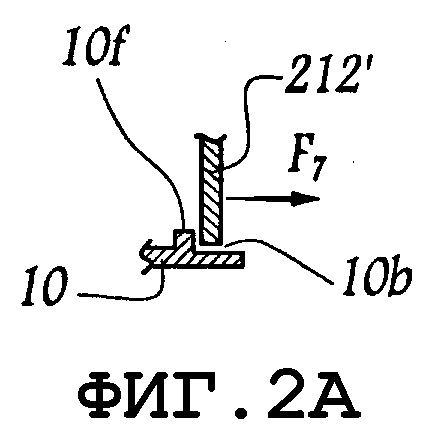
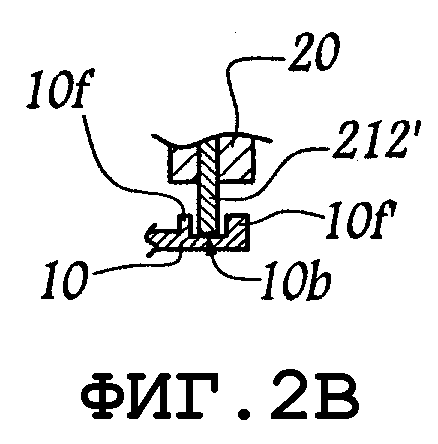
Фиг.2А и 2В - изображение в разрезе соответственно по линиям А-А и В-В фиг.2.
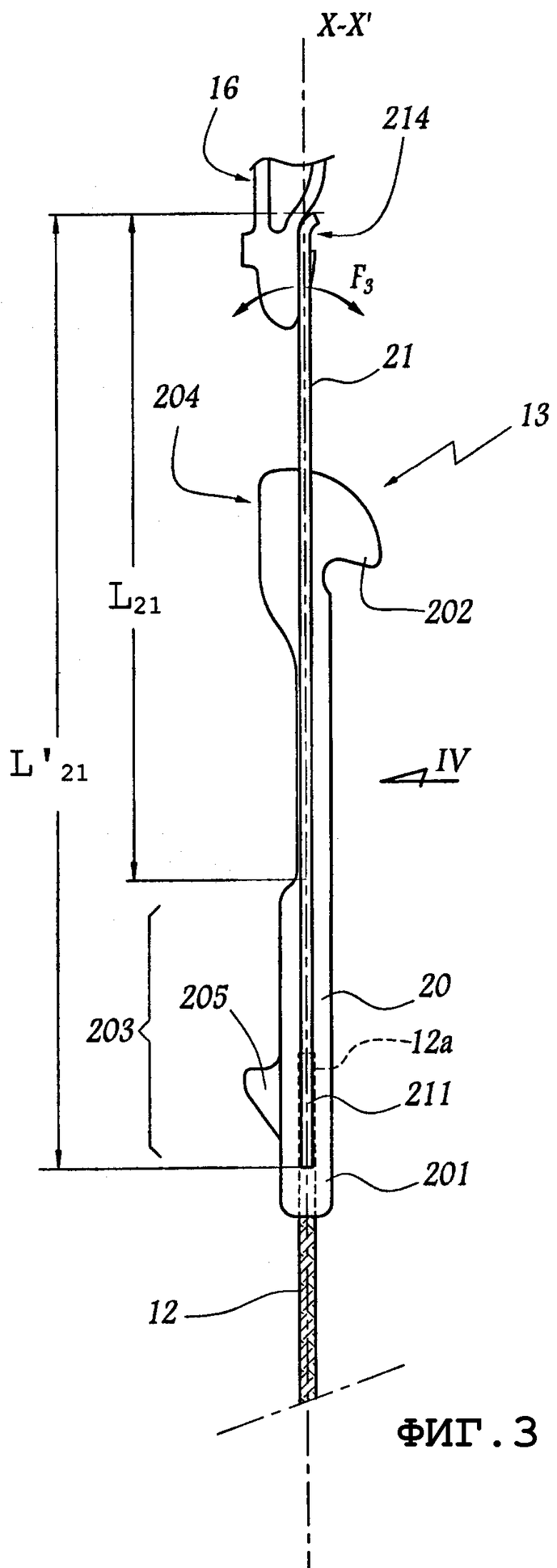
Фиг.3 - увеличенное изображение подвижного крючка и части удерживающего рычага механизма, показанных на фиг.2.
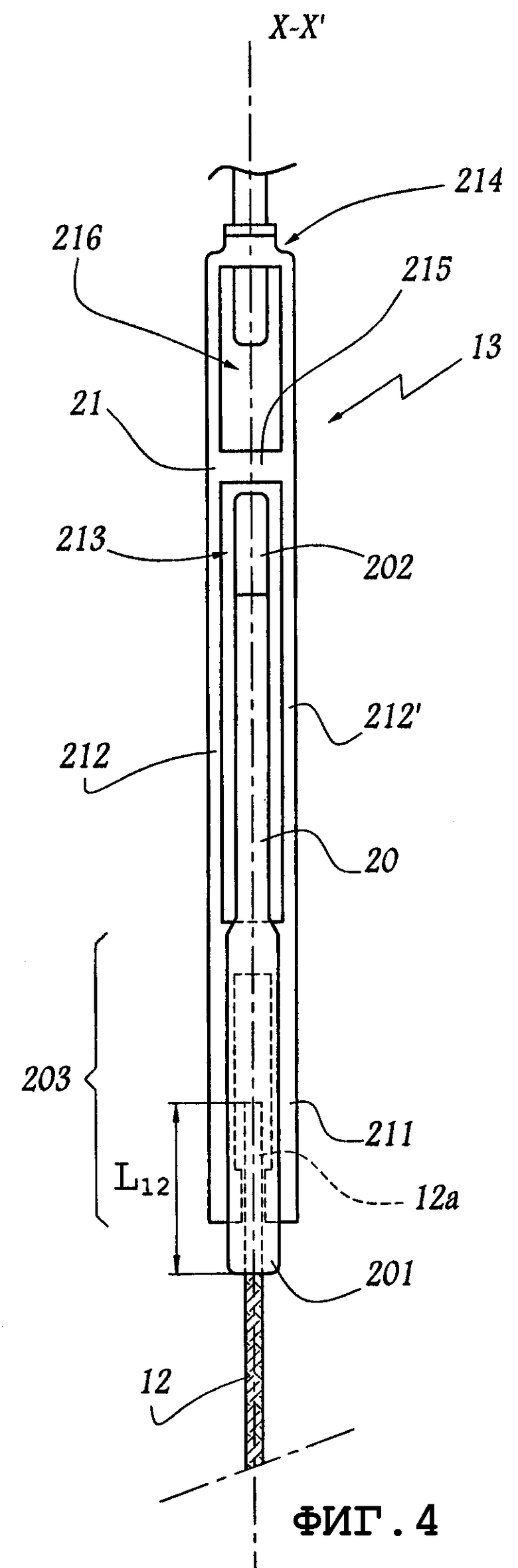
Фиг.4 - изображение со стороны, показанной стрелкой IV на фиг.3.
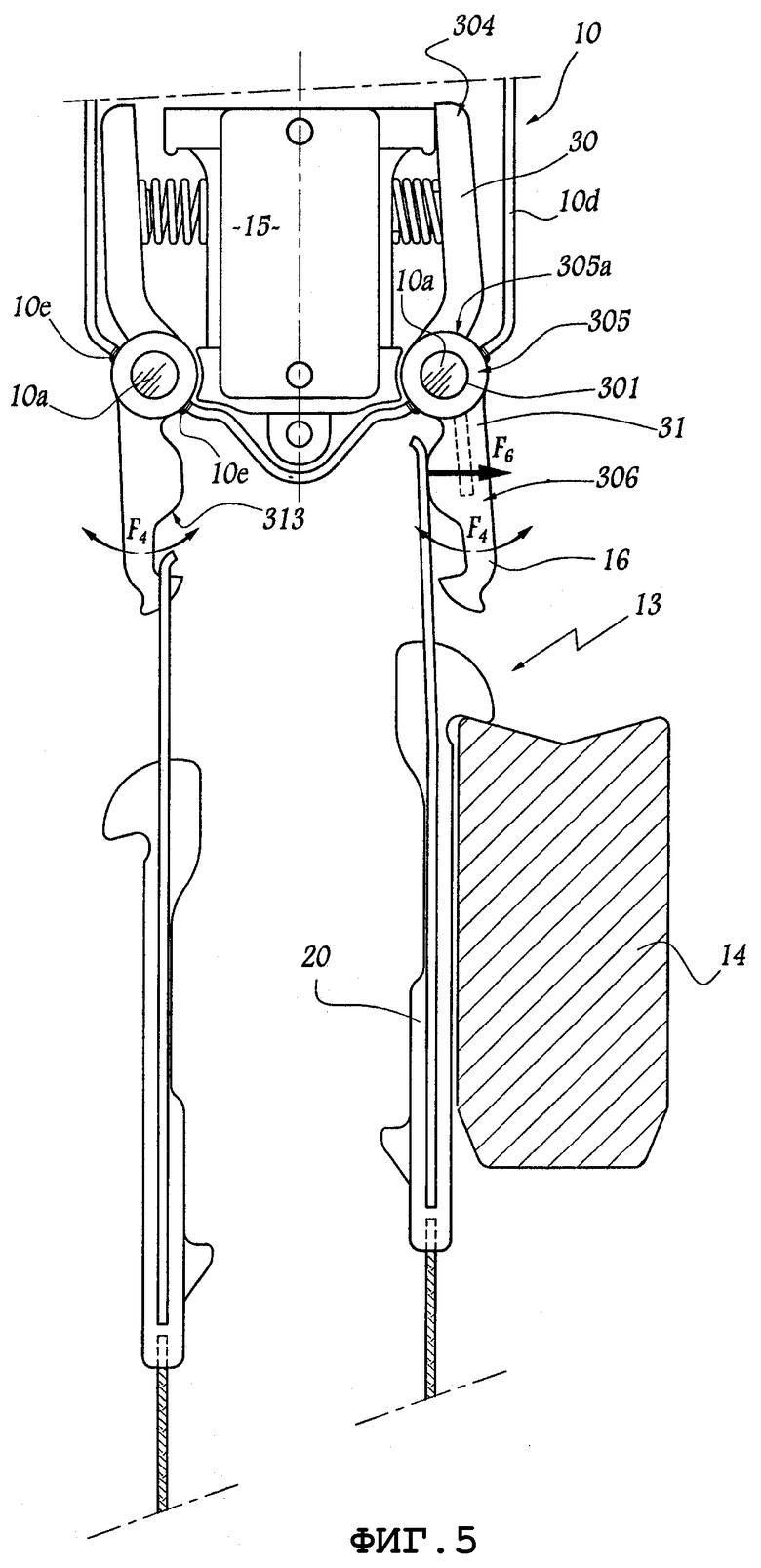
Фиг.5 - изображение, аналогичное фиг.2, механизма согласно второму варианту выполнения настоящего изобретения.
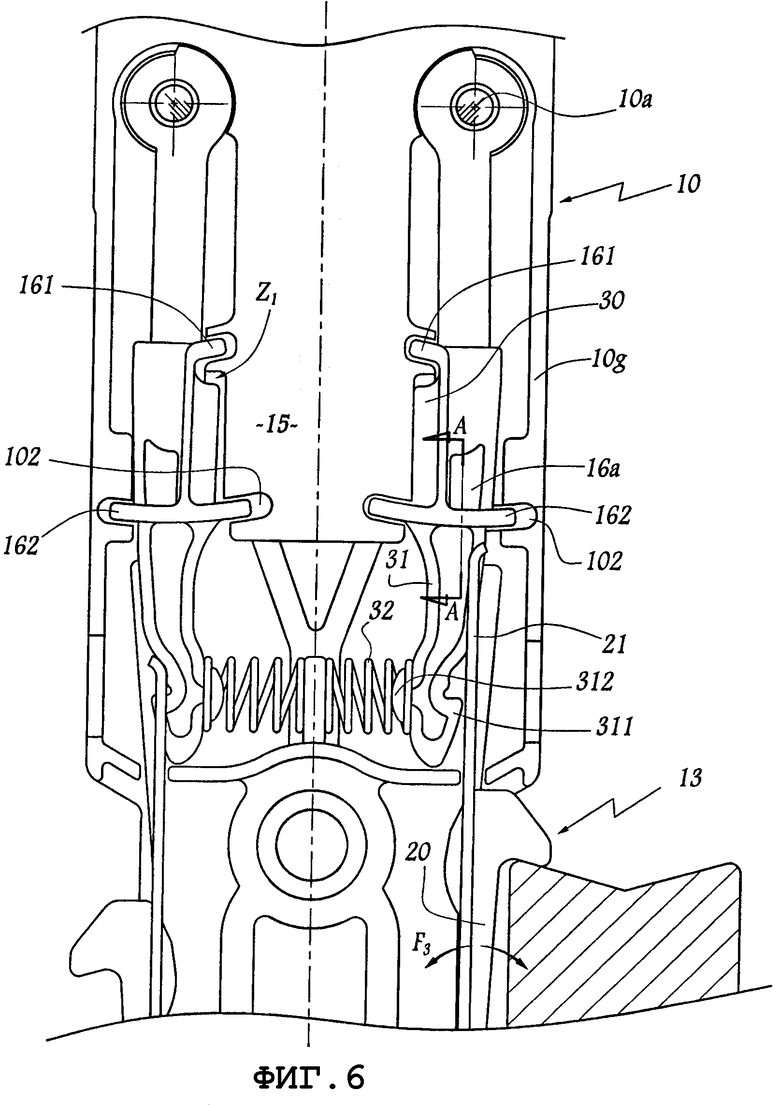
Фиг.6 - частичное изображение в продольном разрезе механизма согласно третьему варианту выполнения настоящего изобретения.
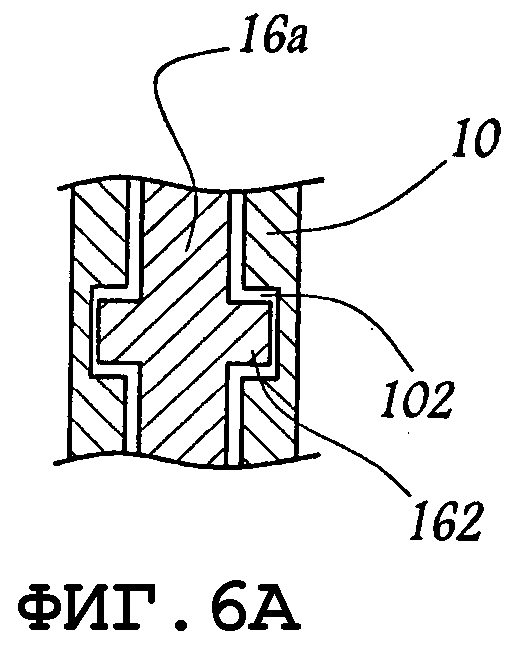
Фиг.6А - частичное изображение в разрезе по линии А-А фиг.6.
В ткацком станке М, показанном на фиг.1, нити основы 1 поступают с навоя 2. Каждая нить основы 1 проходит через глазок 3а ремизки 3, предназначенной для образования зева, в который проходит уточная нить для последующего получения ткани, наматываемой на товарный валик 4. На фиг.1 показаны только две ремизки 3 и 3', при этом ремизка 3 находится в верхнем положении, а ремизка 3' - в нижнем положении. Нижний конец каждой ремизки соединен со станиной ткацкого станка при помощи пружины натяжения 5, тогда как ее верхний конец жестко соединен с аркатом 6.
Зевообразовательный механизм 7, соединенный с электронным блоком управления 8, обеспечивает подъем аркатов 6, преодолевая возвратное усилие, создаваемое пружинами 5. Как показано только для арката, взаимодействующего с ремизкой 3, каждый аркат содержит конец 6а, жестко соединенный с кожухом 10 механизма 7, при этом указанный аркат проходит через блок 11, подвешенный за шнур 12, два конца которого жестко соединены соответственно с двумя подвижными крючками 13, которые избирательно поднимаются ножами 14, совершающими противоположные по фазе возвратно-поступательные вертикальные движения, как показано на фигуре стрелками F2.
Для лучшего понимания чертежа на фиг.1 показана только часть конструктивных элементов зевообразовательного механизма.
Как показано, в частности, на фиг.2-4, каждый крючок 13 содержит пластмассовый корпус 20, в нижний конец 201 которого запрессован конец 12а шнура 12.
Корпус 20 образует единственный мысок 202, выполненный в боковом направлении относительно основной продольной оси Х-Х' корпуса 20. Этот мысок 202 предназначен для упирания в верхнюю поверхность 14а ножа 14. Таким образом крючок 13 может равномерно приподниматься при помощи единственного ножа 14.
Учитывая материал, из которого выполнен корпус 20, он обладает определенной упругостью, которая позволяет ему компенсировать возможные смещения по положению и параллельности траекторий соответственно данного корпуса и взаимодействующего с ним ножа 14. Такая возможность упругой деформации корпуса 20 показана двойной стрелкой F20 на фиг.2. На практике упругость корпуса 20 обеспечивает автоматическое позиционирование мыска 202 на ноже 14.
Крючок 13 содержит также металлическую пластину 21, частично запрессованную в корпус 20. На практике пластина 21 содержит часть 211, запрессованную в зону 203 корпуса 20, расположенную вблизи его нижнего конца 201, то есть под частью 204 корпуса 20, начиная от которой в боковом направлении выполнен мысок 202.
Часть 211 выполнена открытой в нижнем направлении, что обеспечивает прохождение конца 12а шнура 12, который таким образом может быть запрессован в корпус 20 по относительно большой длине L12.
Пластина 21 выступает по длине L21 над частью 211, при этом данная длина является относительно большой по сравнению с общей длиной L'21 пластины 21.
Пластина 21 содержит две боковые стойки 212 и 212', которые определяют между собой окно 213, в котором расположена основная часть корпуса 20.
Стойки 212 и 212' продолжены за пределы окна 213 вплоть до изогнутого конца 214. Стойки 212 и 212' соединены между собой поперечиной 215, отделяющей окно 213 от отверстия 216, выполненного между частями 212, 212', 214 и 215 пластины 21.
Учитывая соответствующий способ крепления, элементы 20 и 21 в нижней части жестко соединены с крючком 13, тогда как часть пластины 21, выступающая по длине L21 над зоной 203 корпуса 20, может отклоняться в боковом направлении, как показано двойной стрелкой F3 на фиг.3. Эти боковые отклонения F3 в сущности соответствуют относительному отклонению пластины 21 по отношению к корпусу 20.
Механизм 7 содержит также электромагнит 15, запрессованный в часть кожуха 10. Такое соединение посредством запрессовки обеспечивает точное позиционирование электромагнита 15 по отношению к кожуху 10 и к элементам, установленным в этом кожухе или направляемым этим кожухом.
Кожух 10 содержит две неподвижные оси 10а, на которых с возможностью поворота установлены два удерживающих рычага 16, предназначенных для взаимодействия соответственно с двумя подвижными крючками 13, соединенными с двумя концами одного и того же шнура 12.
Каждый рычаг 16 содержит металлическую арматуру 30, содержащую цилиндрическое отверстие 301 круглого сечения, соответствующее наружному диаметру оси 10а, поэтому арматура 30 может быть установлена на оси 10а с возможностью поворота, как показано двойными стрелками F4 на фиг.2. Отверстие 301 каждой арматуры 30 выполнено в конце 302 этой арматуры.
Своим противоположным концом 303 арматура 30 запрессована в корпус 31, выполненный из немагнитного материала, такого как синтетический материал, в частности пластмасса. Корпус 31 образует мысок 311, удерживающий подвижный крючок 13 вблизи верхней мертвой точки. Корпус 31 содержит также центровочную пятку 312 для центровки относительно пружины 32, действующей на корпус 31 усилием F5, стремящимся повернуть рычаг 16 наружу от кожуха 6. Под этим усилием мысок 311 входит в отверстие 216 пластины 21 соседнего подвижного крючка, что обеспечивает удержание такого подвижного крючка в верхнем положении.
Металлическая арматура 30 рычага 16 обеспечивает управление его поворотом при помощи электромагнита 15, при этом рычаг 16 может перемещаться изогнутым концом 214 пластины 21 и, в случае необходимости, удерживаться в положении с преодолением усилия F5, когда электромагнит 15 находится в возбужденном состоянии.
Корпус 31 обеспечивает эффективное взаимодействие удерживающего рычага 16 с подвижным крючком 13 при отсутствии контакта (металл/металл).
Каждый из рычагов 16 оснащен отражателем 161, выступающим относительно их основной части 16а в направлении центральной оси Х10-Х'10 кожуха 10 между его шарнирной осью 10а и зоной Z1, в которой арматура приходит в положение упора в электромагнит 15. Второй отражатель 162 выполнен между зоной Z1 и смежным крючком 13. Отражатели 161 и 162 являются подвижными вместе с рычагом 16, перемещаясь внутри пазов 101 и 102, выполненных в корпусе 10, что позволяет им изолировать зону Z1, которая образует таким образом закрытую камеру, защищенную от загрязнения, в частности, от волокон, которые могут переноситься крючком 13.
Учитывая позиционирование осей 10а на кожухе 10 и геометрическую форму рычагов 16, эти рычаги находятся полностью внизу по отношению к данным неподвижным осям, что обеспечивает механизму 7 гораздо большую компактность по сравнению с механизмами, в которых рычаг расположен по обе стороны от его шарнирной оси, как, например, в механизме, описанном в ЕР-А-0219437.
Кроме того, стойки 212 и 212' пластины 21 крючка 13 скользят в пазах 10b, выполненных по высоте кожуха 10, как показано на фиг.2, на которой шнуры 12 показаны лишь частично, чтобы показать пазы 10b. Таким образом, рычаг 13 направляется по отношению к кожуху 10 с достаточной точностью и с минимальным износом. Как видно из фиг.2А и 2В, каждый паз 10b кожуха ограничен двумя нервюрами 10f и 10f', между которыми он выполнен, что обеспечивает эффективное направление стойки 212 или 212', заходящей в этот паз. Каждая нервюра соответствует этой форме нижней части кожуха 10 примерно до места нахождения верхней выпуклой части мыска 202 справа на фиг.2, где нервюра 10f' отсутствует, тогда как нервюра 10f продолжена кверху. Отсутствие наружного борта паза, то есть его открытость в наружную сторону кожуха вблизи удерживающего рычага 16, обеспечивает отклонение в наружную сторону пластины 21 в направлении стрелки F7 на фиг.2В, когда пластина 21 приходит в положение упора в соседний рычаг 16, как показано слева на фиг.2, чтобы обеспечивать нивелирующее усилие F6.
На практике основной изгиб пластины 21 происходит на уровне части кожуха 10, где отсутствует наружный борт паза 10b, при этом данная часть выполнена по высоте Н между верхним положением мыска 202 справа на фиг.2 и зоной взаимодействия между пластиной 21 и рычагом 16 во время нивелирования.
Согласно варианту выполнения настоящего изобретения, не показанному на фигурах, нервюра 10f', образующая наружный борт паза 10b, может быть выполнена по высоте Н, но при этом отходит от нервюры 10f, чтобы обеспечить пластине 21 достаточное пространство для отклонения.
В показанном и упомянутом выше варианте выполнения расширение или раскрытие паза 10b в наружную сторону вблизи элементов 15 и 16 должно обеспечить изгиб пластины 21 в этой зоне.
Согласно техническому решению, описанному в FR-А-2752246, упор 40, нагружаемый упругим усилием от пружины 41, поднимается между траекториями скольжения двух подвижных крючков 13 и упирается в колодки 10с кожуха 10. Этот упругий упор 40 предназначен для взаимодействия с пяткой 205, выполненной вблизи конца 201 каждого корпуса 20. С учетом соответствующего позиционирования элементов 205 и 40 такое взаимодействие происходит, когда каждый подвижный крючок 13 приходит в положение, находящееся рядом с его верхней мертвой точкой. Такая конструкция обеспечивает преодоление основной части усилий инерции и трения подвижных крючков, что облегчает инверсию движения и обеспечивает оптимизацию размеров ремиза и приводных механических деталей, таких как ножи 14, или деталей, обеспечивающих упругое возвратное усилие, таких как пружины 5.
Размеры загнутого конца 214 пластины 21 тоже предусмотрены таким образом, чтобы он приходил в положение упора и действовал усилием F6 на площадку 313, образованную корпусом 31 каждого рычага 16. Этот временный упор крючка 13 в рычаг 16 обеспечивает нивелирование рычага 16, то есть его упор в электромагнит 15 с предварительной упругой нагрузкой благодаря изгибу пластины 21, которая выполняет роль упругого язычка, описанного в ЕР-А-0219437. Таким образом пластина 21 выполняет функцию нивелирования.
Во втором варианте выполнения настоящего изобретения, показанном на фиг.5, элементы, аналогичные элементам первого варианта выполнения, обозначены такими же позициями. Как и в предыдущем случае, ножи 14 служат для избирательного перемещения подвижных крючков 13, каждый из которых содержит корпус 20 из синтетического материала и металлическую пластину 21, в основном выступающую над зоной, в которой она закреплена на этом корпусе. Удерживающие рычаги 16 взаимодействуют с электромагнитом 15.
В этом варианте выполнения рычаги 16 установлены с возможностью поворота вокруг осей 10а, неподвижных по отношению к кожуху 10. В данном случае применено техническое решение ЕР-А-0577524 в том смысле, что кожух 10 содержит перегородки 10d, изолирующие электромагнит 15 от окружающей атмосферы. Каждый рычаг 16 установлен с возможностью поворота вокруг соответствующей оси 10а, что показано двойной стрелкой F4, и содержит арматуру 30, выполненную по обе стороны от оси 10а, на которой она установлена. Точнее говоря, каждая арматура 30 содержит первое плечо 304, выполненное кверху от центральной части 305, в которой выполнено круглое отверстие 301, в которое входит ось 10а. Плечо 304 предназначено для взаимодействия с электромагнитом 15 в зависимости от его активирования. Арматура 30 содержит также плечо 306, выполненное в сторону, противоположную плечу 304 относительно части 305. Это плечо 306 запрессовано с корпусом 31 из пластмассы, образующим мысок 311, предназначенный для взаимодействия с отверстием 216 пластины 21 крючка 13. Корпус 31 образует также площадку 313 нивелирования положения рычага 16, используемую во время взаимодействия с верхним изогнутым концом 214 пластины 21. В этом случае пластина 21 действует на рычаг 16 усилием F6, перемещающим арматуру 30 в сторону электромагнита 15.
Для эффективного изолирования электромагнита 15 перегородки 10d кожуха 10 оснащены уплотнительными прокладками 10е, установленными вблизи наружной цилиндрической поверхности с круглым основанием 305а части 305. Таким образом, независимо от положения рычага 16 относительно оси 10а обеспечивается достаточная герметичность.
Как вариант, перегородки 10d могут быть выполнены с незначительным зазором относительно поверхности 305а, при этом прокладки 10е могут отсутствовать, так как края перегородок 10d в данном случае выполняют роль уплотнительных средств против проникновения пыли.
В третьем варианте выполнения настоящего изобретения, показанном на фиг.6, элементы, аналогичные элементам первого варианта выполнения, обозначены такими же позициями. Как и в предыдущем случае, каждый из крючков 13 содержит пластмассовый корпус 20, а также металлическую пластину 21, при этом данные элементы соединены друг с другом запрессовкой в нижней части корпуса 20. Между корпусом 20 и пластиной 21 каждого крючка возможно движение относительного отклонения F3. Пластина 21 каждого крючка может удерживаться в положении мыском 311, образованным корпусом 31 удерживающего рычага 16, установленного с возможностью поворота вокруг оси 10а, выполненной в кожухе 10. Каждый рычаг 16 содержит металлическую арматуру 30, предназначенную для взаимодействия с электромагнитом 15 на уровне зоны Z1, в которой арматура 30 приходит в положение упора в электромагнит 15 с преодолением упругого усилия, создаваемого пружиной 32, установленной с центровкой на пятке 312 корпуса 31.
Как и в первом варианте выполнения, на каждом рычаге 16 между арматурой 30 и осью 10а выполнен отражатель 161, а второй отражатель 162 выполнен между арматурой 30 и частью корпуса 31, предназначенной для взаимодействия с пластиной 21 крючка 13. Отражатель 162 в этом втором варианте выполнения может перемещаться внутри паза 102, выполненного в кожухе 10, между положениями, показанными соответственно слева и справа на фиг.6. Этот отражатель 162 выступает относительно основной части 16а рычага 16 одновременно в направлении центральной оси Х10-Х'10 кожуха 10 и в противоположном направлении таким образом, чтобы препятствовать проникновению волокон или пыли одновременно между рычагом 16 и электромагнитом 15 и между рычагом 16 и наружной оболочкой 10g кожуха 10.
Кроме того, как показано, в частности, на фиг. 6А, отражатель 162 выступает также перпендикулярно плоскости фиг.6 по отношению к основной части 16а рычага 16, что также препятствует проникновению загрязнения в направлении арматуры 30.
Независимо от рассматриваемого варианта выполнения, упругая пластина 21 эффективно выполняет функции выбора и нивелирования, когда она не находится в контакте с соседним ножом 14, при этом функцию непосредственного взаимодействия с ножом выполняет мысок 202 корпуса 20. Точно так же корпус 20, через который передается усилие натяжения, создаваемое ножом 14, не входит в непосредственный контакт с селекционным устройством, содержащим элементы 15 и 16.
В рамках настоящего изобретения отличительные признаки различных вариантов выполнения могут комбинироваться друг с другом.
Настоящее изобретение касается двухпозиционных зевообразовательных механизмов, применяемых для получения так называемых (гладких) тканей, в отличие от трехпозиционных механизмов, применяемых для производства ковров и бархатных тканей. Вместе с тем изобретение может быть применено в рамках комплекса из двухпозиционных механизмов, позволяющих получать двух- или трехпозиционный зев, что описано, например, в ЕР-В-0399930 или FR-В-2715666.
Изобретение относится к области текстильного машиностроения и касается зевообразовательного механизма для ткацкого станка типа Жаккарда, содержащего подвижные крючки, каждый из которых перемещается ножом от положения верхней мертвой точки, в которой или рядом с которой каждый крючок может быть остановлен избирательным устройством, до положения нижней мертвой точки, при этом каждый крючок содержит корпус с выполненным в нем мыском, предназначенным для упирания в указанный нож. Каждый крючок дополнительно содержит металлическую пластину, предназначенную для взаимодействия с избирательным устройством и закрепленную на корпусе в зоне корпуса, противоположной избирательному устройству, с возможностью отклонения относительно указанного корпуса по отношению к зоне корпуса, в которой выполнен указанный мысок. Данный механизм имеет повышенную надежность в работе. 2 н. и 14 з.п. ф-лы, 9 ил.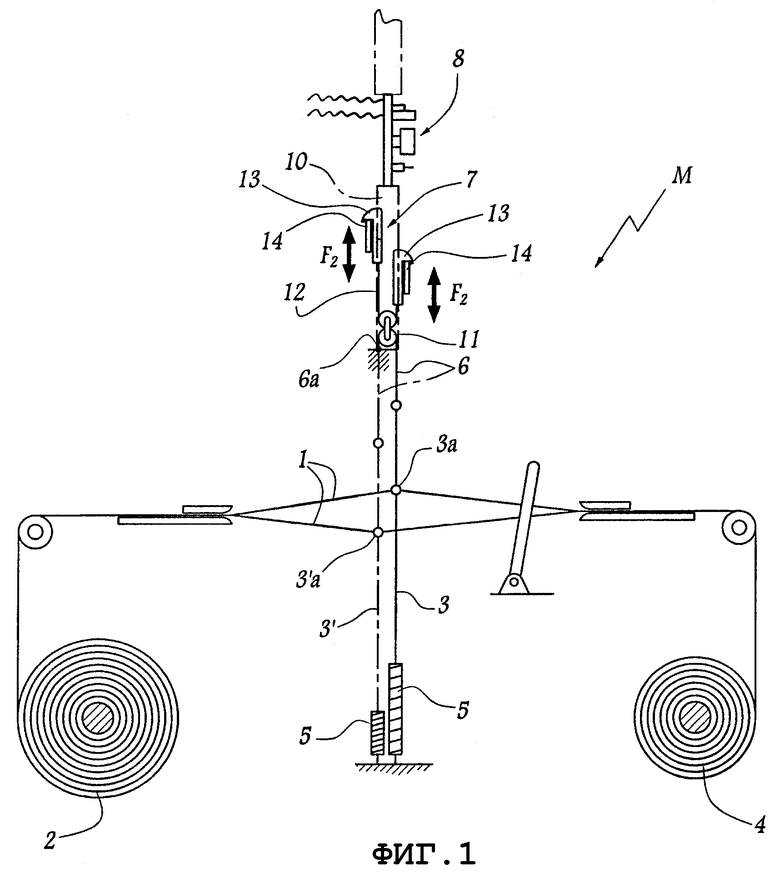
| US 5133389 А, 28.07.1992 | |||
| Устройство для контроля и сигнализации о ходе технологического процесса | 1983 |
|
SU1136603A1 |
| Устройство для посола шкур сухой консервированной смесью | 1978 |
|
SU779384A1 |
| Секционная печь | 1979 |
|
SU851048A1 |
| РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 0 |
|
SU219437A1 |
| Устройство отбора подъемных крючков жаккардовой машины открытого зева | 1988 |
|
SU1584754A3 |

