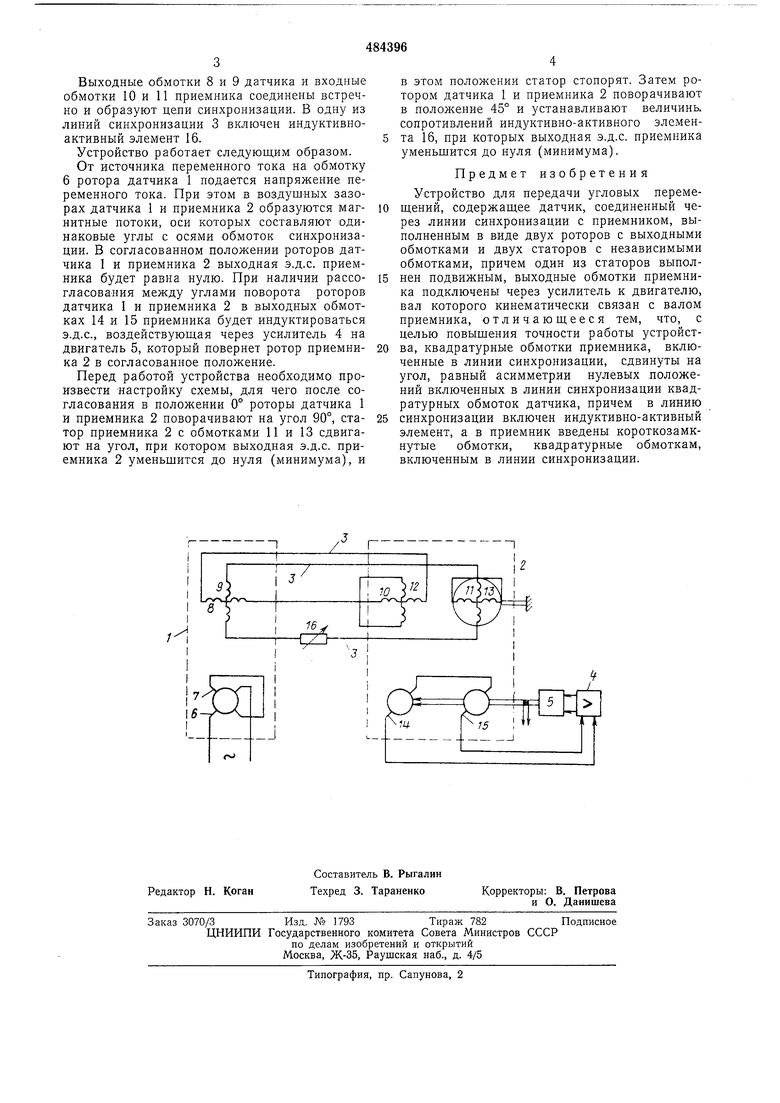
Выходные обмотки 8 и 9 датчика и входные обмотки 10 и И приемника соединены встречно и образуют цепи синхронизации. В одну из линий синхронизации 3 включен индуктивноактивный элемент 16.
Устройство работает следующим образом.
От источника неременного тока на обмотку 6 ротора датчика 1 подается напряжение переменного тока. При этом в воздушных зазорах датчика 1 и приемника 2 образуются магнитные потоки, оси которых составляют одинаковые углы с осями обмоток синхронизации. В согласованном положении роторов датчика 1 и приемника 2 выходная з.д.с. приемника будет равна нулю. При наличии рассогласования между углами поворота роторов датчика 1 и приемника 2 в выходных обмотках 14 и 15 приемпика будет индуктироваться Э.Д.С., воздействующая через усилитель 4 на двигатель 5, который повернет ротор приемника 2 в согласованное положение.
Перед работой устройства необходимо произвести настройку схемы, для чего после согласования в положении 0° роторы датчика 1 и приемника 2 поворачивают на угол 90°, статор приемника 2 с обмотками 11 и 13 сдвигают на угол, при котором выходная э.д.с. приемника 2 уменьшится до нуля (минимума), и
в этом положении статор стопорят. Затем ротором датчика I и приемника 2 поворачивают в положение 45° и устанавливают величины сопротивлений индуктивно-активного элемента 16, при которых выходная э.д.с. приемника уменьшится до нуля (минимума).
Предмет изобретения
Устройство для передачи угловых перемещений, содержащее датчик, соединенный через линии синхронизации с приемником, выполненным в виде двух роторов с выходными обмотками и двух статоров с независимыми обмотками, причем один из статоров выполнен подвижным, выходные обмотки приемника подключены через усилитель к двигателю, вал которого кинематически связан с валом приемника, отличающееся тем, что, с целью повышения точности работы устройства, квадратурные обмотки приемника, включенные в линии синхронизации, сдвинуты на угол, равный асимметрии нулевых положений включенных в линии синхронизации квадратурных обмоток датчика, причем в линию
синхронизации включен индуктивно-активный элемент, а в приемник введены короткозамкнутые обмотки, квадратурные обмоткам, включенным в линии синхронизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи угловых перемещений | 1978 |
|
SU723643A1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| Двухканальный бесконтактный датчик угловых перемещений | 1985 |
|
SU1310623A2 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU1014000A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |
| Устройство для измерения погрешности одноканальной электромашинной системы передачи угла | 1978 |
|
SU743126A1 |
| Устройство для дискретного заданияуглОВ пОВОРОТА ВАлА | 1979 |
|
SU824257A1 |
| Двухканальный бесконтактный датчик угловых перемещений | 1979 |
|
SU894347A1 |
