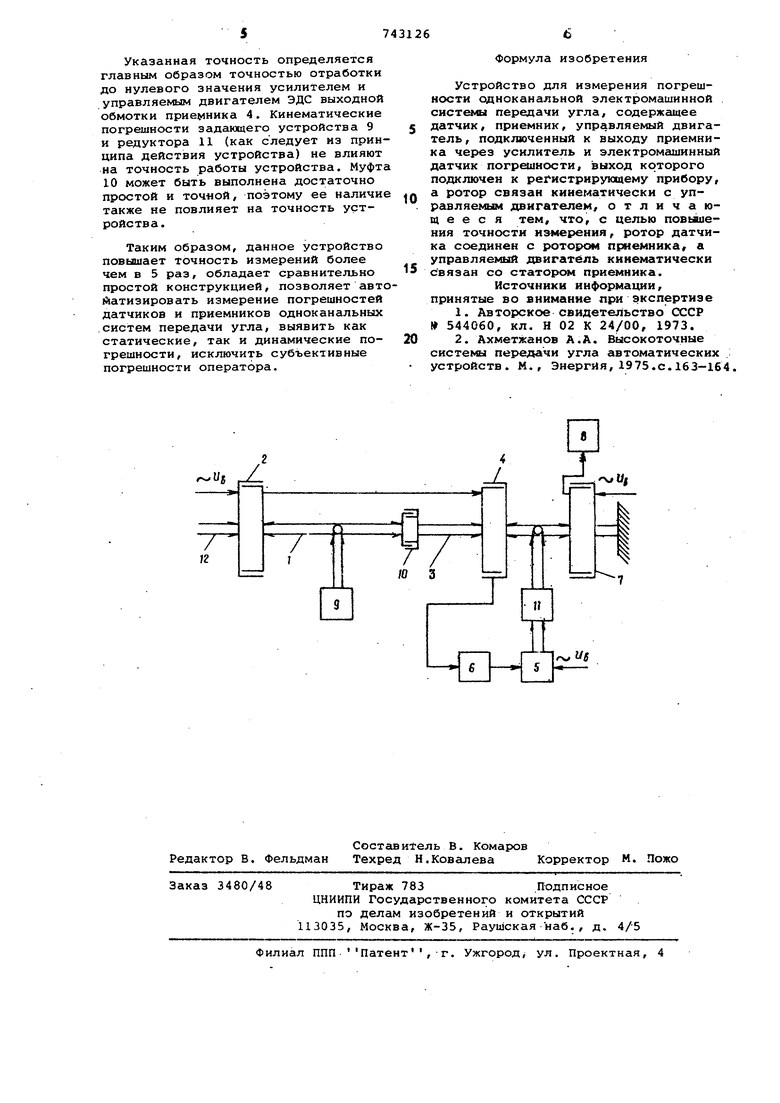
на его выходной обмотке появится напряжение рассогласования, пропорционгшьное погрешностям системы, которое подается на регистрирующий прибор. Таким образом, при повороте входного вала с ротором ВТ-датчика на регистрирующем приборе отсчитьюается напряжение, пропорциональное погрешности системы в каждом угловом положении Это устройство отличается от известных сравнительной простотой и ма лой трудоемкостью измерений, но имеет низкую точность измерения, порядка 30 угловых сек. Целью изобретения является повышение точности измерения. Это достигается тем, что в устрой стве для измерения погрешности одноканальной электромашинной системы пе редачи угла, содержащей датчик, приемник, управляемый электродвигатель, подключенный к выходу приемника через усилитель и электромашинный датчик погрешности, выход которого подключен к регистрирующему прибору, а ротор связан кинематически с управля мьм двигателем, ротор датчика соединей с роторомприемника,а управляемый двигатель кинематически связан со статором приемника. На чертеже изображена функциональ ная схема устройства. Устройство содержит входной вал 1 с установленным на нем ротором проверяемого датчика 2, выходной вал 3 с установленным на нем ротором прюверяемого приемника 4 управляемый двигатель 5, усилитель 6, датчик 7 погрешности, регистрирующий прибор 8 Задающее поворотное устройство 9, мо жет быть выполнено либо в виде ручно го- кинематического привода, либо в виде двигателя с редуктором. Входной вал 1 сочленен с выходным валом 3, например, с помощью муфты 10. Статор приемника 4 и ротор датчика 7 установлены на одном валу. Выходная обмотка приемника 4 через усилитель б подключена к управляемому двигателю 5, кинематически.(через редуктор 11) связанному с валом, на котором установлены статор приемника 4 и ротор датчика 7. Статор датчика 7 закрепле неподвижно. Выходная обмотка датчика подключена к регистрирующему прибору 8. На обмотки, возбуждения (входные) датчика 2, датчика 7 и управляе мого двигателя 5 поданы питающие напряжец ия переменного тока « Ug. Выходные обмотки датчика 2 соединены с входными обмотками приемника 4 по схеме одноканальной системы передачи угла. Датчик 2 и приемник 4 установлены в согласованное положение разво ротом статора датчика 2 с помощью ва ла 12. Таким образом, перед началом рабо ты необходимо установить в устройство проверяемый.датчик 2 и приемник 4 включить их в схему, подать питающее напряжение и выставить в согласованное положение датчик 2 и приемник- 4. Устройство работает следующим образом. При помощи задающего устройства 9 входной 1 и выходной 3 валы, сочлененные между собой, вместе с роторами проверяемых датчика 2 и приемника 4 поворачиваются на определенные углы или начинают вращаться с определенной скоростью. В идеальном случае при отсутствии погрешностей датчика 2 и приемника 4 нулевое значение напряжения на выходной обмотке приемника 4, -установленное при согласовании положений датчика 2 и приемника 4 с помощью вала 12, не изменяется и при работе устройства. В реальном случае на выходной обмотке Приемника возникает ЭДС, пропорциональная погрешности датчика 2 и приемника 4. Эта ЭДС через усилитель 6 подается на обмотку управления двигателя 5. Управляемый двигатель 5 отрабатывает ЭДС, до нулевого значения, поворачивая через редуктор 11 статор приемника 4 и ротор датчика 7 на угол, равный погрешности. Выходное напряжение датчика 7, в качестве которого может быть применен многополюсный вращающийся трансформатор, изменится пропорционально углу поворота его ротора, т.е. углу, равному погрешности. В результате показание регистрирующего прибора. 8, подключенного к выходной обмотке датчика 7, будет пропоркдионально измеряемой погрешности . В качестве регистрирующего прибора 8 могут быть применены вольтметр, цифропечатающее устройство или самописец. В соответствии с этим в зависимости от производственной необходимости и от режима работы задающего устройства 9 (дискретного или непрерывного поворота валов 1 и 3), информацию об измеряемых погрешностях можно получить в виде показаний на вольтметре, таблицы на печатающем устройстве или кривой на ленте самописца. Повышение точности предлагаемого устройства по сравнению с прототипом определяется тем, что датчик 7 разворачивается не на полный угол, соответствующий углу поворота проверяемых датчика 2 и приемника 4, а только на малый угол в несколько угловых минут или секунд, соответствующий измеряемым погрешностям. На этом малом угле погрешности установки и формы статора и ротора датчика 7 не вызывают появления паразитного напряжения на его выходной обмотке, и в результате точность работы устройства значительно повышается и находится на уровне ±5 угловых сек.
Указанная точность определяется главным образом точностью отработки до нулевого значения усилителем и управляемьм двигателем ЭДС выходной обмотки приемника 4. Кинематические погрешности задающего устройства 9 и редуктора 11 (как следует из принципа действия устройства) не влияют на точность работы устройства. Муфта 10 может быть выполнена достаточно простой и точной, поэтому ее наличие также не повлияет на точность устройства.
Таким образом, данное устройство повышает точность измерений более чем в 5 раз, обладает сравнительно простой конструкцией, позволяет автоАатизировать измерение погрешностей датчиков и приемников одноканальных систем передачи угла, выявить как статические, так и динамические погрешности, исключить субъективные погрешности оператора.
Формула изобретения
Устройство для измерения погрешности одноканальной электромашинной . системы передачи угла, содержащее датчик, приемник, управляемый двигатель, подключенный к выходу приемника через усилитель и электромашинный датчик погреиности, выход которого подключен к регистрирующему прибору, а ротор связан кинематически с управляемым двигателем, отличающееся тем, что, с целью повьвиения точности измерения, ротор датчика соединен с ротором приемника, а управляемый двигатель кинематически
5 связан со статорся4 приемника. Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 544060, кл. Н 02 К 24/00, 1973.
0
2.Ахметжанов А.А. Высокоточные системы передачи угла автоматических . устройств. М., Энергия,1975.с.163-164,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Устройство для дискретного заданияуглОВ пОВОРОТА ВАлА | 1979 |
|
SU824257A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1987 |
|
SU1472854A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
