О
Изобретение относится к дистанционным системам передачи перемещений, а именно к устройствам для дистанционной передачи угловых перемещений.
Известны дистандионные передачи для измерения угла рассогласования двух осей на информационных микромашинах, которые состоят из датчика и двух приемников. Обмотка статора датчика подключена к источ-. нику питания, выходные статорные обмотки приемников подключены к нагрузочным резисторам, а роторные обмотки синхронизации датчика и приемников соединены параллельно 1.
Ввиду того, что один из приемников мож находиться в заторможенном режиме, а другой - в режиме слежения, из-за реакции тока нагруженной обмотки статора заторможенного приемника появляется ошибка на выходной обмотке следящего приемника.
Наиболее близким по технической сущности к изобретению является устройство для дистанционной передачи угловых перемещений, содержащее дат1шк, следящий и заторможенный приемники нагрузочными резне- торами. Первая статорная обмотка датчика соединена с источником питания, одноименные роторные обмотки датчика и приемников соединены параллельно 2.
Недостатком известной дистанционной передачи является наличие ощибки у следящего приемника при работе одного из приемников в заторможенном режиме. Уменьшение взаимного влияния приемников достигается вторичным симметрированием, одного при этом крутизна выходного сигнала также уменьшается. Первичное симметрирование, производимое замыканием накоротко квадратурной обмотки датчика для уменьшения погрешности, приводит к увеличению ошибки устройства от несимметрии цепей синхронизации.
Цель изобретения - повьциение точности устройства за счет достижения работоспособности без юшибок, вносимых заторможенным приемником, и увеличения крутизны выходного сигнала.
Поставленная цель достигается т«м, что в устройство для дистанционной передачи угловых перемещений, содержащее датчик, следящий и заторможенный приемники, выполненные в виде статора и ротора с обмотками, нагрузочные резисторы, первый из которых подключен к статорной обмотке заторможенного приемника, и источник питания, 1юдключенный к первой статорной обмотке датчика, введены два конденсатора, один из которых подключен параллельно первому нагрузочному резистору, вторая статорная обмотка Датчика соединена последовательно оо статорной обмоткой следящего приемника и подключены к второму нагрузочному резистору, параллельно которому включен, другой конденсатор, одноименные обмотки роторов датчика, следящего и заторможенного приемников соеди-. нены последовательно н встречно.
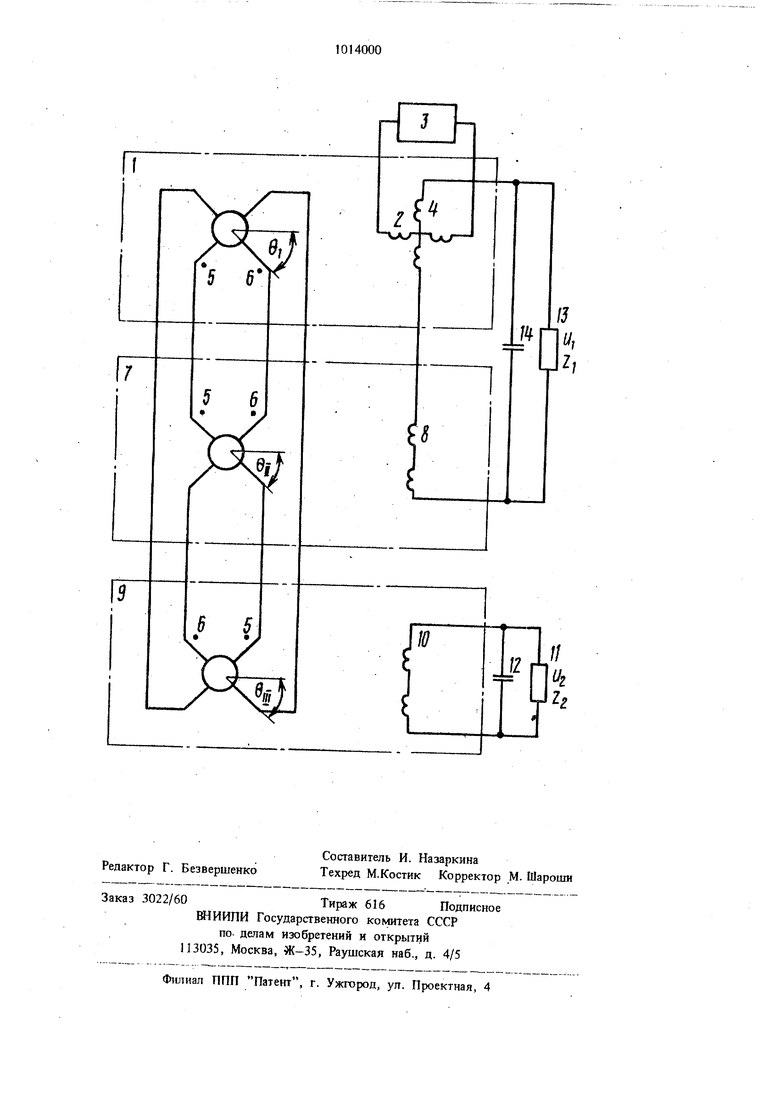
На чертеже приведена принципиальная схема предлагаемого устройства.
Устройство для дистанционной передачи угловых перемещений содержит датчик 1, имеющий на статоре первую статорную обмотку 2, подключенную к источнику 3 питания,.вторую статорную обмотку 4 и две электрически ортогональные обмотки 5 и 6, на роторе, следящий приемник 7, имеющий на статоре обмотку 8, заторможенный приемник 9, имеюЩИй на стороне обмотку 10, подключенную к параллельно соединенным первым нагрузочному резистору 11 и конденсатору 12. Второй нагрузочный резистор 13 и конденсатор 14 подключен параллельно двум последовательно соединенным обмотке 4 датчика 1 и обмотке 8 следящего приемника 1. Одноименные
роторные обмотки 5 и 6 датчика 1, приемников 7 и 9 соединены последовательно и встречно.
Датчик 1 запитьшается напряжением возбуждения, которое подается на обмотку 2 от источника 3 питания. При повороте ротора
0 датчика 1 на угол в-, магнитный поток обмотки 2 наводит в роторных обмотках 5 и 6 ЭДС, коЮрая передается одноименным роторным обмоткам приемников 7 и 9 и вызьшает появление магнитных потоков, наводящих
5 ЭДС в статорных обмотках В и 10. Выходной сигнал следящего приемника 7 равен
jf- (0,-е„)4
I dlV
C7l5-l6 t (6,,,Vsivi 20,31, (1)
где и - напряжение возбуждения;
Л - главный определитель системь 45урайнений;
Z и 22Г сопротивления нагрузок 11 и 13; Zg ч Т-(,- сопротивления цепей синхронизации обмоток 5 н 6;
X Ум сопротивление взаимоиндукции об50моток статора и ротора;
0,и 0„- углы поворота роторов датчика 1 и приемника 7.
Сопротивления одноименных обмоток практически равны,, поэтому второе слагаемое выражения (1) из-за iZ., равно нулю. Напряжение и/) в согласованном положении равно нулю и не зависит от положения заторможенного приемника 9 вщ . Выходной сигнал заторможенного прнемиик 9, снимаемый с обмотки 10, равен ,(25+Zfe)siHC0,-e,,, -a5-Z.6)5iVl(0,4.6,,,)3.U) Из формулы (2) видно, что выходной сигнал 0 зависит от разности углов в| и Q-i,, не зависит от угла поворота ротора 0,. следящего приемника 7.. Отношение выходного сигнала Ц к выхо ному сигналу известного устройства выражает ся формулой W .4Cos(gr€,.)3 . -Л-Х,0-Лсо5ЗД-в„)Г где X- коэффициент рассеяния маг нитного потока ВТ;. -rtv fv V V чУОзффициент рассения маг 5 t 8 1 нитнoгo потока приелоппса 7 с учетом емкостйого со-: - , противления; индуктивные conpotHBnetaM обмоток 4 и 8; X.. - -- - емкостное сопротивление . Vконденсатора 14; - коэффициент нагрузки. Из формулы (3) видно, что при включении конденсатора 14, емкостное сопротивление которого равно сумме индуктивных « противп|Ьний статорных обмб1бк, коэффйци ейт К/ возрастает. Отнощение выходного напряжения к выходному сигналу известного устройства выражается формулой 1l(1-A) l-A-A-aCl-XcOu Ce,- ©,„)р гдеХ«коэффициент рассеяния магнитного потока п|Я1емника 9 с учетом емкостного сопротивления; -индуктивное сопротивление обмотки 10; -емкостное сопротивплкие конденсатора 12; L - чг - коэффициент нагрузi .o-V ки. При включении конденсатора 12, емкостное сопротивление рав1 полоВйве собственного индуктивного сопротивления обмотки 10, коэффициент К возрастает. Таким образом, последовательное соеюгае кие второй статорной обмотки датчика с выходной обмоткой и нагрузкой следящего приемника, а также последовательное я встреч ное соединение одноименных роторных обмоток датчика и приемников позволяет достигнуть работоспособность без ошибок, вносимьЬс заторможенным приемником. Включение конденсаторов параллельно нагрузкам спедящего и заторможенного приемников Позволяет теличить крутизну выходного сигнала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Трансформаторная дистанционная передача | 1980 |
|
SU894772A1 |
| Следящая система | 1978 |
|
SU781758A1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| СЕЛЬСИННОЕ ТРАНСФОРМАТОРНОЕ УСТРОЙСТВО | 1967 |
|
SU205911A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 1972 |
|
SU324635A1 |
| Устройство для передачи угловых перемещений | 1978 |
|
SU723643A1 |
| Преобразователь угол-фаза | 1974 |
|
SU602770A2 |
| Сигнализатор уровней сыпучих материалов | 1972 |
|
SU474691A1 |
| Преобразователь угла рассогласования валов в напряжение | 1986 |
|
SU1336068A1 |
УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЩиЧЙ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ, содержащее датчик, следящий и заторможенный приемники, выполненные в виде статора и ротора с обмотками, нагрузочные резисторы, первый из которых подключен к статорной обмотке заторможенного приемника, и источник питания, подключенный к первой сгаторной обмотке датчика, отличающееся тем, что, с целыо повышения точности устройства, в него введены два конденсатора, одан из которых подключен па)раллельно первому нагрузочному резистору, вторая стаюрная обмотка датчика соеданена последовательно СО статорной обмоткой Следящего приемника и подключены к второму нагрузочному резистору, параллельно которому .включен другой конденсатор, одаоименные обмотки роторов датчика, следящего и заторможенного приёмников соединены последовательно и встречно.
6 5
10
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Баканов В | |||
| М | |||
| и др | |||
| Шформационные микромашины следящих и счетно-решающих систем | |||
| М., Советское радио, 1977, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пульер Ю | |||
| М | |||
| Индукционные электромеханические элементы вьгшслительных и дистанционно-следящих систем. | |||
| М., Энергия, 1964, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
