(54) ИСКУССТВЕННАЯ КИСТЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная кисть | 1981 |
|
SU973122A1 |
| Искусственная кисть | 1978 |
|
SU764671A1 |
| Искусственная кисть | 1979 |
|
SU850070A1 |
| Искусственная кисть | 1982 |
|
SU1026801A1 |
| Искусственная кисть | 1979 |
|
SU825063A1 |
| Искусственная кисть | 1979 |
|
SU810234A1 |
| Искусственная кисть с механизмом изменения передаточного отношения | 1971 |
|
SU512763A1 |
| Искусственная кисть | 1971 |
|
SU480414A1 |
| Искусственная кисть | 1986 |
|
SU1438766A1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
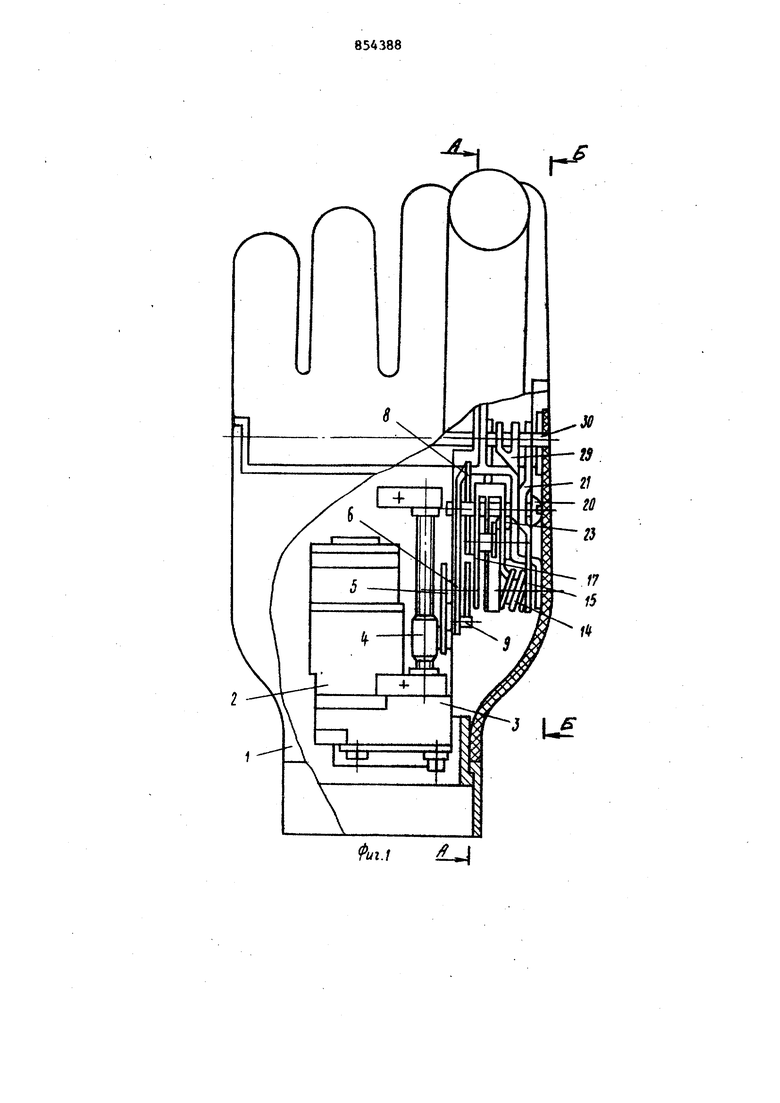
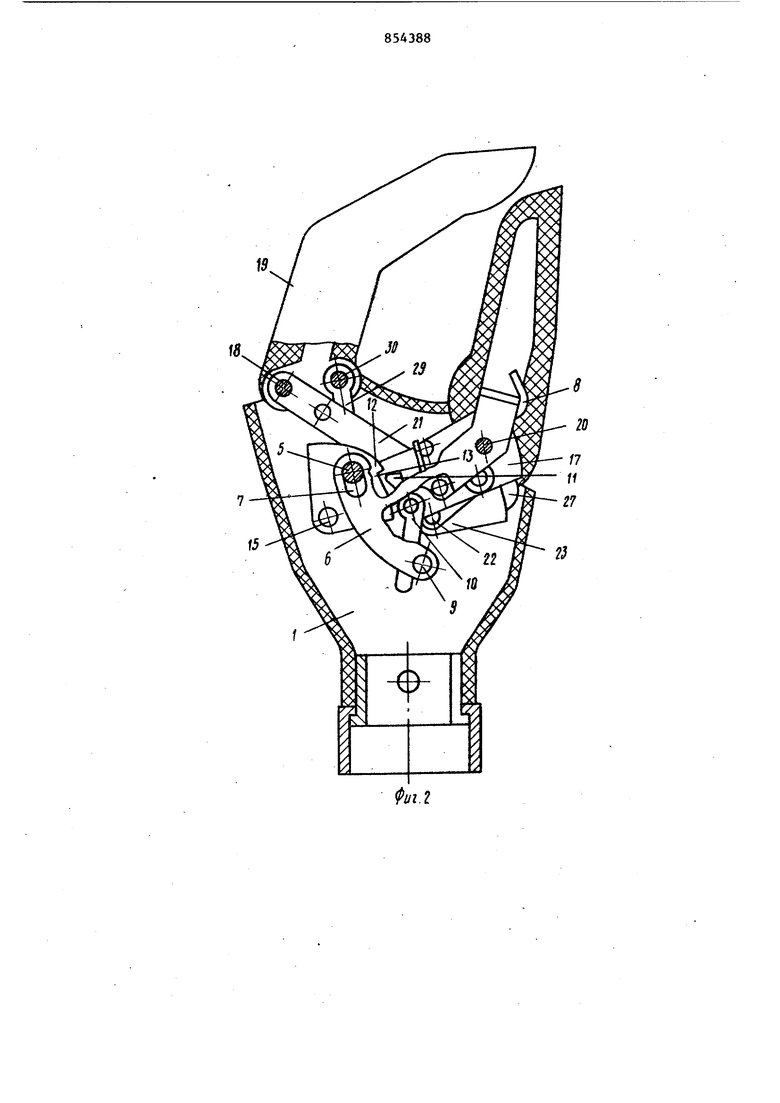
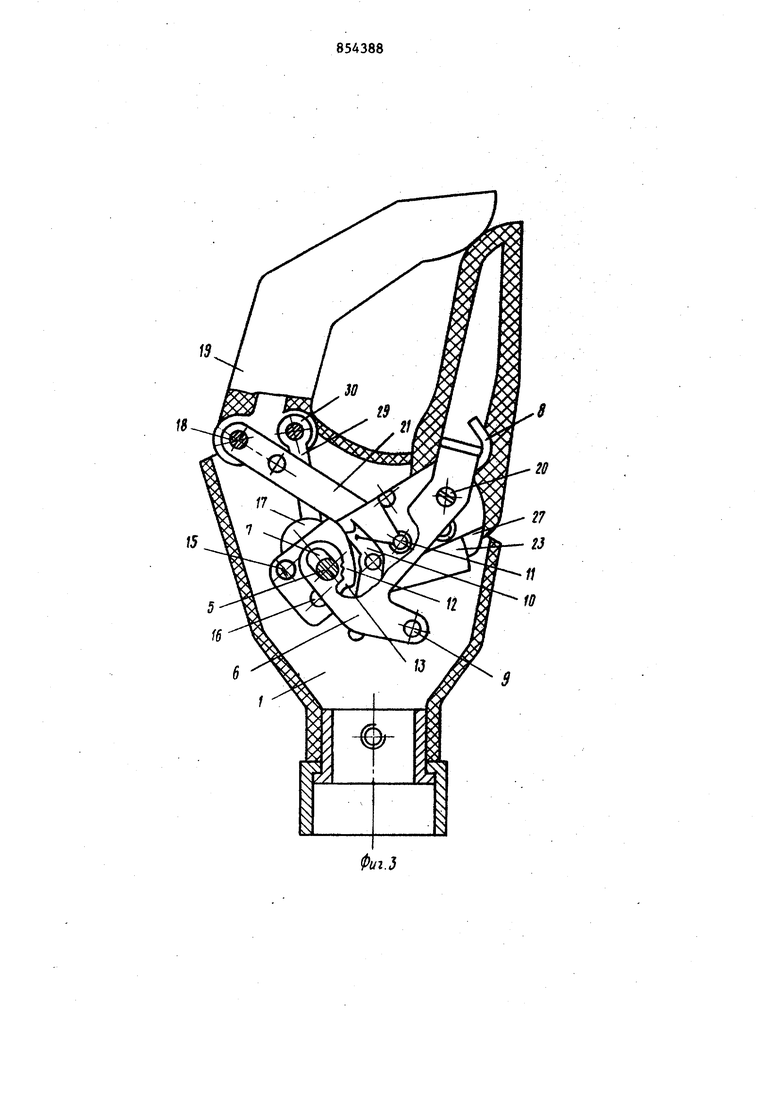
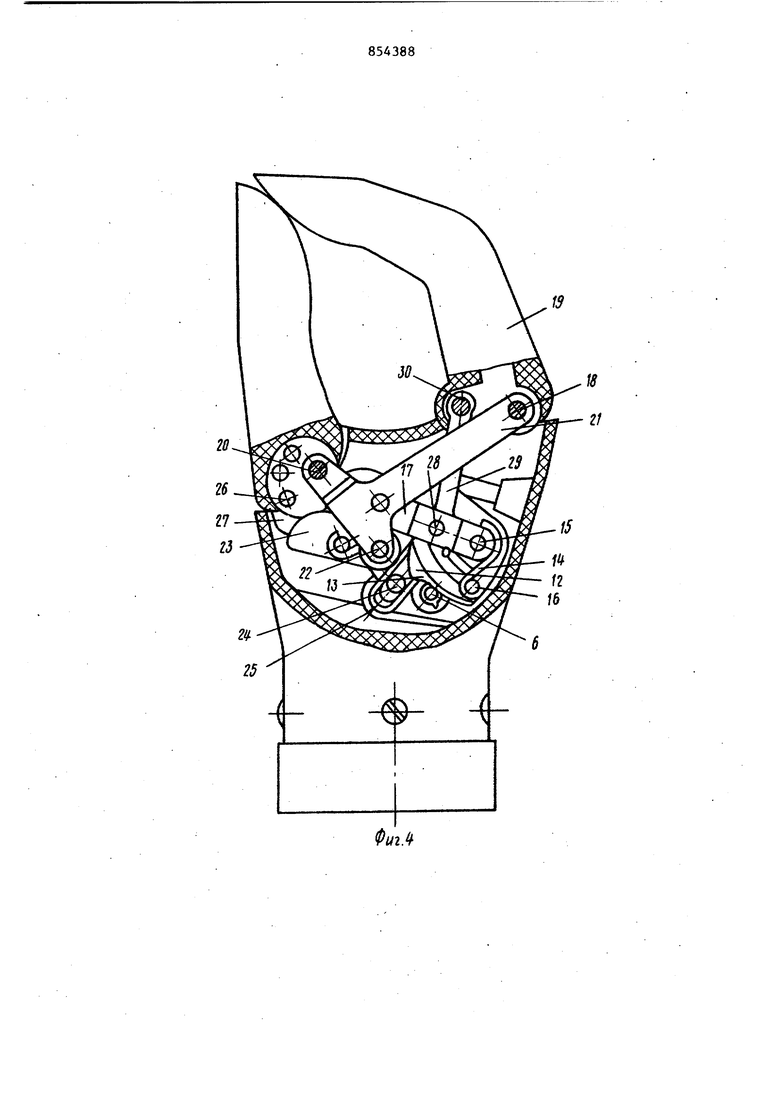
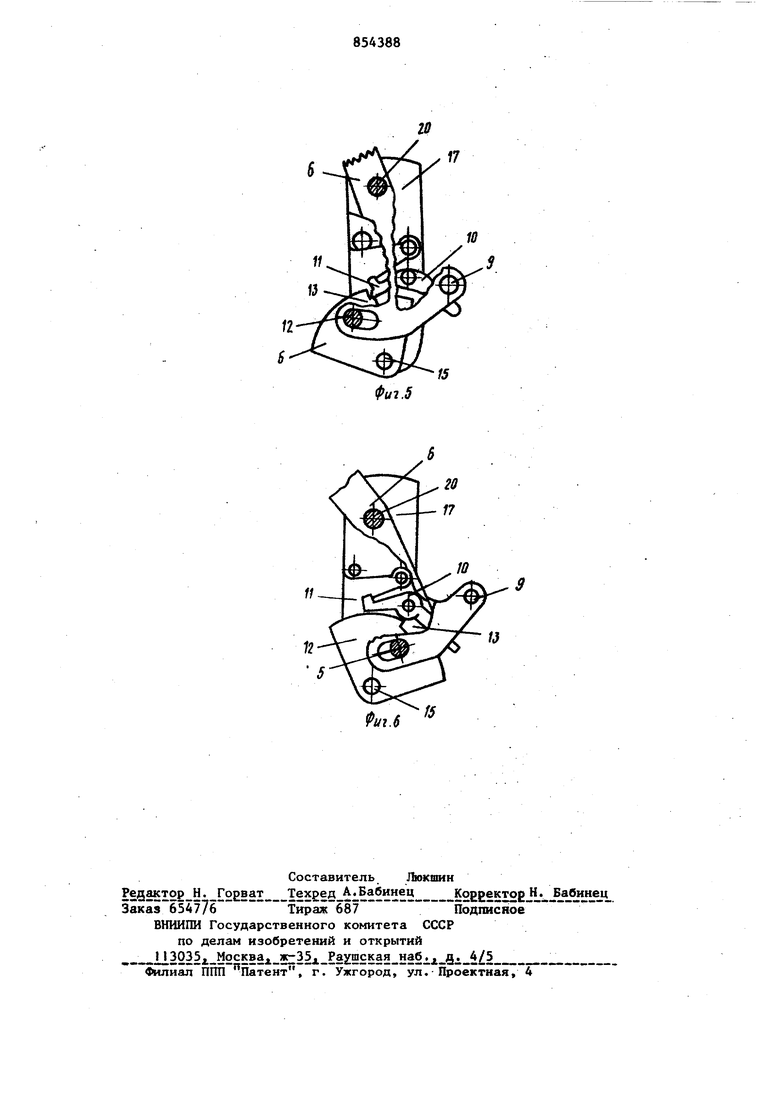
Изобретение относится к медицинск технике, к протезам верхних конечнос тей. Известна искусственная кисть, которая содержит корпус, первый палец со стержнем и основанием и блок второго-пятого пальцев с подвижной и не подвижной осями, электропривод с выходной передачей винт-гайка, посредством кривошипа соединенной с рычаго первого пальца, контактный переключатель и фиксатор, при этом контактный переключатель выполнен в виде рычага 6 Г-образным вырезом, в котором расположен кривошип, другой конец рычага шарнирно соединен с подвижной осью П-У пальцев, фиксатор состоит из шатуна, штифта, планок, упора со стойкой, кинематически связанного с подпружиненным кулачком, кроме того, кулачок соединен посредством тяги с кривошипом, а шатун с подвижной осью П-У папьцев и стойкой фиксатора и 1. Однако хотя с помощью данной кисти возможно получить необходимую силу схвата пальцев, для обеспечения указанной силы используется только энергия прямого хода редуктора электропривода, тогда как обратный ход редуктора является холостым и энергия на его выполнение тратится нерационально. Цель изобрете: ия - снижение энергопотребления электроприводом. Поставленная цель достигается тем, что в искусственной кисти, содержащей корпус, первый палец с основанием и стержнем, блок 2-5 папьцев с подвижной и неподвижными осями, электропривод с выходной передачей винтгайка и кривошипом, соединенным с рычагом первого пальца, контактный переключатель и фиксатор, выполненный в виде планок, подпружиненного кулачка и. штифта, подвижно соединенного с кривошипом, на оси первого пальца шарнирно установлена рамка,. на которой закреплены пружины-акку муляторы и пластины с зубом, а также подпружиненная защелка с гуркым выступом, причем защелка контактно соединена со стержнем первого пальца а посредством выступа - с зубом плас тины . На фиг. I изображена искусственная кисть с частичным вырезом ладонной части корпуса; на фиг. 2 - сечение А-А на фиг. 1, положение механиз ма при движении пальцев до контакта с предметом; на фиг, 3 - то же, для .положения механизма при движении паль цев после контакта с предметом; на фиг. 4 - сечение - на фиг. I; на фиг. 5 - положение переключателя при фиксированном усилителе; на фиг. положение переключателя при расфиксированном усилителе. Искусственная кисть содержит корпус 1 (фиг. l), электропривод с электродвигателем 2 и редуктором 3 с выходной передачей 4 винт-гайка, на гайке закреплен кривошип 5, соединен ный с основаннем 6 первого пальца. На основани 6 предусмотрен паз 7 (фиг. 2), с помощью которого основание соединено с кривошипом. Основание первого пальца одновременно является деталью контактного переключателя . На нем закреплен конец пружи ны 8 ограниченного сгибания первого пальца и стержень 9, входящий в контакт с подпружиненной защелкой 10 посредством фигурного выступа II. , Усилитель состоит из пластины 12с зубом 13, на котором закреплены пружина-аккумулятор 14, ось 15 и Ьтойка 16. Защелка 10 переключателя и пластина 12 усилителя установлены на рам ке 17, выполненной в виде вилки, и входят в контакт между собой посредством зуба 13 и выступа 11. Пластина I2 усилителя посредством оси кривоши па 5 подвижно соединена с редуктором 3 и с основанием 6 первого пальца. Между неподвижной осью 18 блока 19 2-5 пальцев и осью 20 первого пал ца установлены две планки 21, на оси 22 (фиг. 2) подвижно установлен псдпруткиненный кулачек 23, на котором закреплен штифт 24 (фиг. 4). Планки, подпружиненный кулачек и штифт образуют фиксатор. На штифт прорезью надета тяга 25, конец которой шарнирно связан с кривошипом 5 редуктора (4иг. I и 2). На рамке 17, щарнирно 8 4 закрепленной на оси 20, с помощью У)си 26 (г. 4) установлен упор 27. Кроме того, посредством оси 28, шатуна 29 и подвижной оси 30 рамка соединена с блоком 2-5 пальцев. Искусственная кисть работает следующим образом. При включении злектродвигателя 2 (фиг. i) на раскрытие пальцев, редуктор 3 посредством выходной передачи 4 винт-гайка и кривошипа 5 вращает пластину 12 вместе с закрепленной на ней пружиной-аккумулятором 14. В начале фазы раскрытия пальцев до нарушения контакта пальцев с предметом, т.е. в период зарядка пружины-аккумулятора 14, на кривошип 5 редуктора кроме энергии электропривода действуют с одной стороны сила сопротивления пружины-аккумулятор 14, с другой стороны - сила упругих деформаций звеньев механизма, которые действуют на кривошип 5 через основание 6 первого пальца. В начальный момент раскрытия пальцев силы упругих деформаций больше сопротивления пружины-аккунулятора 14,и электропривод работает в холостом режиме. По мере раскрытия пальцев нагрузка на электропривод постепенно . увеличивается, и в конце движения Электропривод работает в пусковом режиме, т.е. для зарядки пружиныаккумулятора используются силы упругих деформаций, что дает возможность производить зарядку пружины с меньшими затратами энергии электропривода. Одновременно с этим тяга 25, закрепленная на кривошипе 5, прорезью движется по штифту 24 и при полном снятии нагрузки с первого пальца и полной зарядке пружины-аккумулятора прорезь тяги достигает крайнего положения, поворачивает подпружиненный кулачек 23, кулачек 23 отходит от упора 27 и расфиксирует блок 2-5 пальцев, начинается раскрытие . пальцев. В начале фазы раскрытия первый палец под действием пружины 8 смещается на 3-4 мм в сторону закрытия пальцев и освобождает подпружиненную защелку 10 с выступом II переключателя, вследствие чего она входит в контакт с зубом 13 пластины 12 усилителя и фиксирует ее, а вместе с ней и пружину-аккумулятор 14 в заведенном положении. В фазе раскрытия одновременно с первым пальцев враща ется рамка 17, которая с помощью шатуна 29 производит поворот блока 2-5 пальцев до иеобходиМого положения. Двигатель выключается. При включении электродвигателя 2 на схват пальцев редуктор 3 посредством кривошипа 5 вращает все пал ЦЫ до контакта с предметом. Одновременно вращается подпружиненный кулачек 23 и, как только движение пальцев под действием сопротивления предмета останавливается, кулачек входит в контакт с упором 27, фиксирует рамку 17, а вместе с ней, с помощью шатуна 29, фиксируется и блок 2-5 пальцев. После контакта пальцев с предметом, когда электропривод преодолевает сопротивление пружины 8, происходит смещение первого пальца на 3-4 мм в сторону раскрытия. При этом основание 6 первого пальца посредством стержня 9 нажимает защелку 10 (фиг.З контактного переключателя, выводит ее из зацепления с зубом I3 пластины 12 усилителя, благодаря чему освобождается пружина-аккумулятор 14, которая посредством пластины 12 вместе с кривошипом вращает первый палец в сторону закрытия, В начальный период после контакта их с предметом пальцы движутся за счет энергии электропривода до тех пор, пока силы сопротивления предмета не превы сят силу пружины 8 ограниченного сги бания пальцев. После этого изменяетс передаточное отношение, происходит фиксация блока 2-5 пальцев и включается пружина-аккумулятор 14, которая связана с основанием первого паль ца посредством кривошипа 5 редуктора поэтому скорость -движения первого пальца при включении пружины-аккумулятора 14 регулируется работой электропривода. В связи с тем, что движения электропривода передаются только на основание первого пальца, то время достижения максимальной силы увеличивается больше чем в 2 раза, диапазон регулирования силы схвата со ответственно увеличивается. После из- менения передаточного отношения и включения пружины-аккумулятора 14 нагрузка на электропривод резко умень шается, и привод работает в холостом режиме до тех пор, пока силы сопротив ления упругих деформаций не сравняют,ся с силой действия пружины-аккумулятора на кривошип 5. С ростом сопротивления сил упругих деформаций нагрузка на электропривод увеличивается и достигает максимального усилия. К концу фазы двигатель работает в пусковом режиме. Таким образом, механизм позволяет использовать накопленную пружинойаккумулятором потенциальную энергию после контакта пальцев с предметом параллельно с энергией прямого хода редуктора, при этом требуемая сила схвата достигается при меньшей мощности электропривода. Кроме того, на зарядку пружины-аккумулятора расходуется часть энергии упругих деформаций, которая освобождается при раскрытии пальцев в фазе их движения до нарушения контакта с предметом, т.е. экономится энергия источника питания, поэтому в данной искусственной кисти можно использовать электропривод, мощность которого на 35-50% меньше мощности применяемого привода, а значит, емкость источника питания и его габариты уменьшаются. Формула изобретения Искусственная кисть, содержащая корпус, первый палец с основанием и стержнем, блок 2-5 пальцев с подвижной и неподвижными осями, электропривод с выходной передачей виит-гайка и кривошипом, соединенным с рычагом первого пальца, контактный переключатель и фиксатор, выполненный в виде планок, подпружиненного кулачка и штифта подвижно соединенного с кривошипом, отличающаяс я тем, что, с целью снижения энергопотребления электроприводом, на оси первого пальца гаарнирно установлена рамка, на которой закреплены пружины-аккумуляторы и пластины с зубом, а также подпружиненная защелка с фигурным выступом, причем защелка контактно соединена со стержнем первого пальца, а посредством выступа - с зубом пластины. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2635191/28-13 кл. А 61 Fl/06, 1978 г. Изобретение в Госреестре но злрегистриропано.
r
v
.1/LJ
W
13
f6
i9
f7
