Известно устройство контроля прямоли- нейности базы очистного комплекса, содержащее последовательно связанные между |собой гибкие звенья, датчики контроля отУклонения секций, формирователи сигналов : отклонения секций базы друг относительно,, друга и относительно линий задания и из- , мерители пути с тросом, установленные на крайних секциях базы.
- .--,,
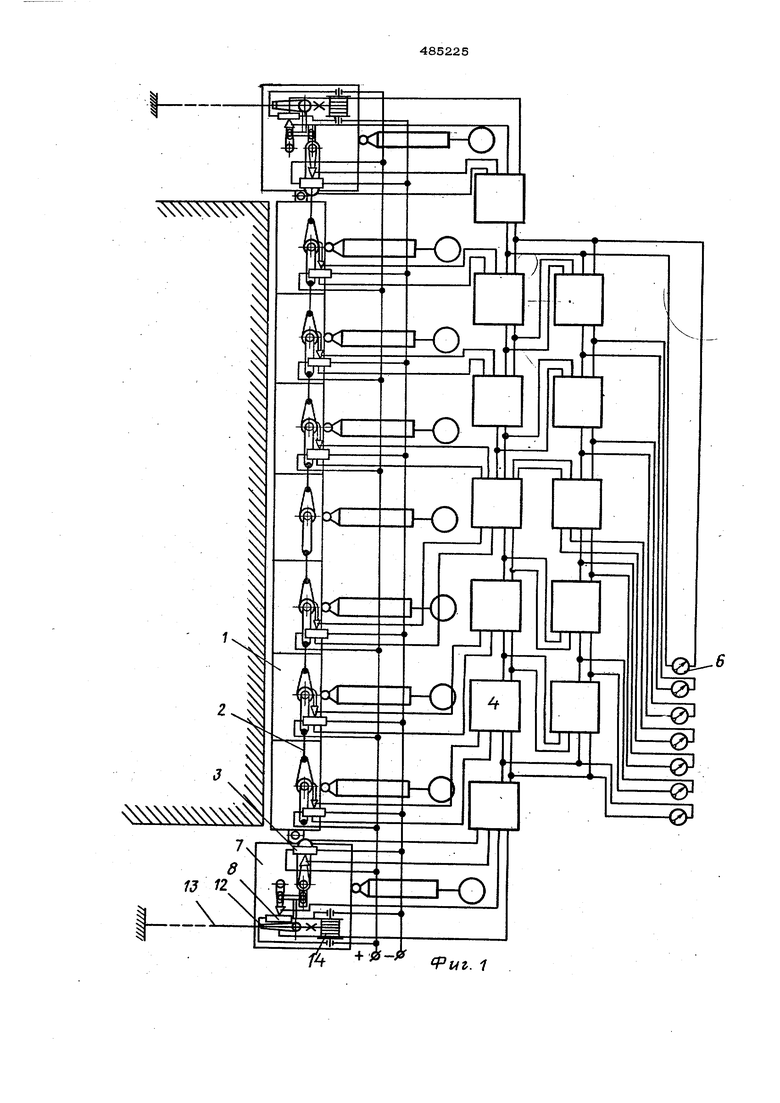
Предлагаемое устройство отличается от известного тем, что на крайних секциях ; базы дополнительно установлены датчики компенсации ложного сигнала, включенные встречно с датчиками контроля отклонения . этих секций, движки датчиков компенсации и отклонения шарнирно связаны между собой и кинематически - с тросом измерителя пути, нричем части устройства, связанные с крайними секциями базы, объединены между собой общим формирователем сигналов отклонения. Это повыщает точность работы устройства за счет компенсации влияния положения крайних секций базьь I На фиг, 1 дана принципиальная схема
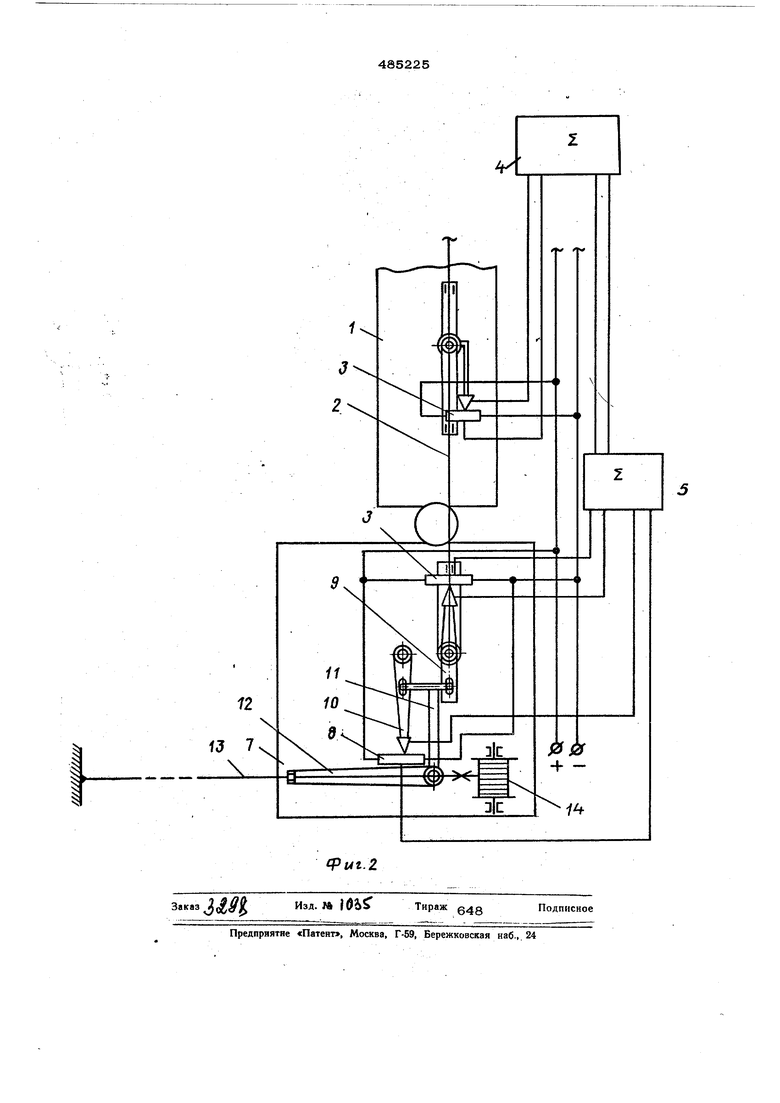
устройства; на фиг. 2 изображена установка датчиков на крайней секции базы.
Секции базы 1 для контроля их положения связаны между собой гибкими звеньями 2, кинематически соединенными с датчиками 3 контроля отклонения секций. Датчики
3отклонения подключены к формирователям
4сигналов отклонения секций один относительно другого. Формирователи 4 соединены
с формирователями 5 сигналов отклонения контролируемых секций относительно линии задания. На выходе формирователей 5 включены индикаторы отклонения 6. На крайних секциях базы 7 (см. фиг. 2) дополнительно установлены датчики 8 компенсации ложного сигнала. Они включены встречно по отношению к датчикам 3 контроля отклонения этих секций. Движки 9 и 10 датчиксж 3 и 8 щарнирно связаны между собой при
помощи поводка 11, соединенного с поворотной консолью 12, взаимодействующей с тросом 13 измерителя 14 пути. Части i устройства, связанные с каждой из крайних секций базы, объединены между собой общим
формирователем 15 сигналов отклонения.
Устройство работает следующим образом При нормапьнс положении базы 1 комплек са относительно линии задания все элементы устройства занимают нейтральное положение, и сигналы рассогласования на выхо|Де формирователей 4 и 5 равны нулю. При .отклонении какой-либо контролируемой секции относительно двух соседних секций нарушается соосность гибких звеньев 2 всех трех секций и в соответствии с этим сиг- нал рассогласования появляется на выходе датчиков 3, установленных на этих гибких звеньях. Причем величина отклонения датчика 3, расположенного на отклонившейся секции, равна суммарной величине отклонений двух соседних датчиков 3 и имеет противоположный знак. Выходные сигналы ;этих датчиков последовательно и двукратIHO алгебраически суммируются в формирошателях отклонения 4 и 5 и подаются к индикаторам 6. Датчики 3 подключены к формирователям таким образом, что их сигнал передается только в одном направлении - от формирователя крайней секции к формирователю 15. Это позволяет всегда получать на выходе каждого из формирователей 5 сигнал, пропорциональный отклонению соответствующей контролируемой секции относительно линии задания. Когда все контролируемые секции отклонены от носитвльно линии задания таким образом, что соосность всех гибких звеньев 2 не нарушена, то от нейтрального положения отклоняются только датчики 3, расположенные на крайних секциях базы 7. Сигнал рассогласования появляется только на выходе этих датчиков. При этом выходной сигнал каждого из датчиков 3, последовательно суммируется в формирователях 4, на выходе каждого из которых появляется Сигнал, пропорциональный отклонению данной контролируемой секции относительно ,предыдущей. Эти сигналы последовательно суммируются в формирователяк 5, форми|рующих на выходе сигнал, пропорциональный отклонению соответствующей контролируемой секции относительно линии зада|нйя. По показаниям индикатора 6 оператор комплекса определяет положение дан- :Рой секции относительно линии задания, При необходимости осуществления автоматического поддержания прямолинейности базь выходной сигнал фсрмирователей,, 5 подается на срответствующие электрогидроклапаны, управляющие ходовыми домкратами. Если одна из крайних секций поворачивается на некоторый угол, то точки поворота движков 9 и 1О датчиков 3 и 8
смещаются относительно точки поворота консоли 12. На выходе датчиков появляю-гся сигналы рассогласования. Сигналы эти равны, поскольку равны величины перемещения движков датчиков 9 и 1О. Так как датчики включены встречно, то на формирователь 4 крайней секции поступает cmv нал, равный нулю. Тоже самое происходит
. и при смещении крайней секции в продольном направлении вдоль базы. Таким образом компенсируется ложный сигнал, кото- рый появляется на выходе первого датчика i 3 при нарущении положения крайней секции.
-
Предмет изобретения
4
Устройство контроля прямолинейности базы очистного комплекса, содержащее последовательно связанные между собой гибкие звенья, датчики контроля отклонения секций, формирователи сигналов отклонения секций базы друг относительно друга и oi носительно линии задания и измерители пути с тросом, установленные на крайних секциях базы, отличающееся тем, что, с целью повыщения точности работы устройства, на крайних секциях базы дополнительно установлены датчики компенсации ложного сигнала, включенные встречно с датчиками контроля отклонения этих секций, движки датчиков компенсации и отклонения щарнирно связаны между собой и кинематически - с тросом измерителя пути, причем части устройства, связанные с крайними секциями базы, объединены между собой общим формирователем сигналов отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления перемещением базовой балки очистного агрегата циклического действия и устройство для его осуществления | 1980 |
|
SU911031A1 |
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
| Устройство для автоматического регулирования процесса синтеза аммиака | 1982 |
|
SU1033435A1 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Многоканальная система управления процессом приготовления смесей | 1974 |
|
SU732811A1 |
| Импульсная следящая система | 1986 |
|
SU1746359A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Устройство для защиты линии в сети с компенсированной нейтралью от однофазного замыкания на землю | 1983 |
|
SU1129690A1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1410917A1 |
| Механизированная крепь | 1979 |
|
SU800381A1 |