Изобретение относится к автоматизации агрегатов циклического действия, а именно к средствам автоматического поддержания заданной толщины стружки и обеспечения прямолинейности базы агрегата в плоскости пласта. Известно устройство для управленй,я перемещением базы (конвейера) механизированной крепи с целью обеспечения необходимой прямолинейности лавы. Сущность устройства сводится к измерению пути перемещения контролируемой точки полинейной- величине размотки гибкой нити, свободньд конец которой оставлен в завале L Недостатком этого устройства является то, что положение нити в завале неопределенно.
Известно также устройство для управления перемещением базовой балки очистного агрегата периодического действия, содержащее базовую балку, выполненную в виже жестких прогонов секции крепи, гидроцилиндры базы и крепи, задающие элементы в виде линейных гидравлических дозаторов, механизмы гидрозахвата, состоящие из гидроцилиндров с подпружиненными поршнями, через которые перпендикулярно оси пропущены скалки дозаторов и неподвижные... направляющие 5 укрепленные на базе, а также звенья жесткой обратной связи, соединенные с цилиндрами механизмов гидрозахвата, гидропереключателями и магнитоуправляющими датчиками контроля исполнения команд 2 .
Недостатком известного устройств является невозможность автоматически ликвидировать нелинейность базы путем изменения шага последующей передвижки.
Цель изобретения - обеспечение прямолинейности путем -автоматическо компенсации имеющихся искривлений базы.
Поставленная цель достигается тем, что устройство для управления перемещением базовой балки очистног агрегата периодического действия, содержащее базовую балку, выполненную в виде жестких прогонов, секции крепи, гидроцилиндры базы и крепи задающие элементы в виде линейных . гидравлических дозаторов, механизг ш гидрозахвата, состоящие из гидродилиндров с подпружиненными поршнями, через которые перпендикулярно оси пропущены скалки дозаторов и неподвижные направляющие, укрепленные на базе, а также звенья жесткой обратной связи, соединеннь е с дили-ндрами механизмов гидрозахвата, гидропереключателями и магнитоуправляющими датчиками контроля исполнения команд, снабжено установленными на Концах смежных линейных прогонов базы датчиками угла рассогласования прогонов и автоматическими корректорами задания шага передвижки, выполненными в виде сообщающегося с порщневой полостью дозатора гидравлического цилиндра, внутри которого размещен плавающий гидрозолотник с кольцевой выточкой, причем датчики знака угла рассогласования прогонов выполнены в виде двухлинейного гидропереключателя, выходы которого соединены с входными отверстиями гидроцилиндра датчика знака угла.
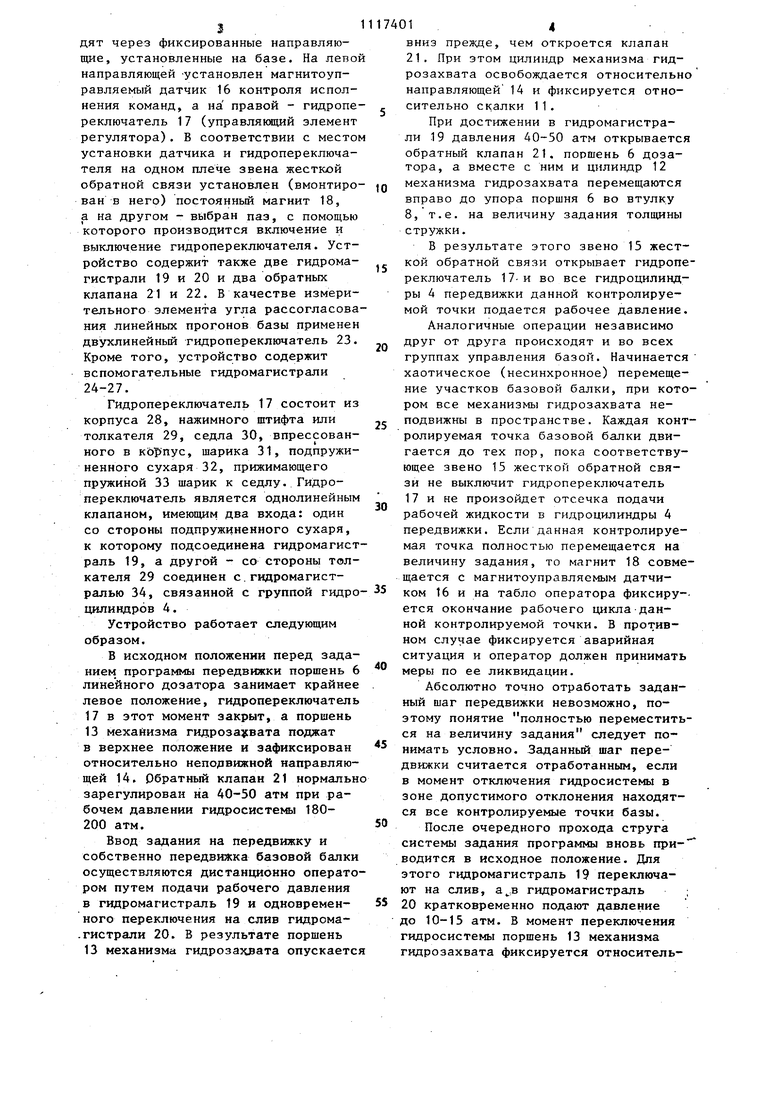
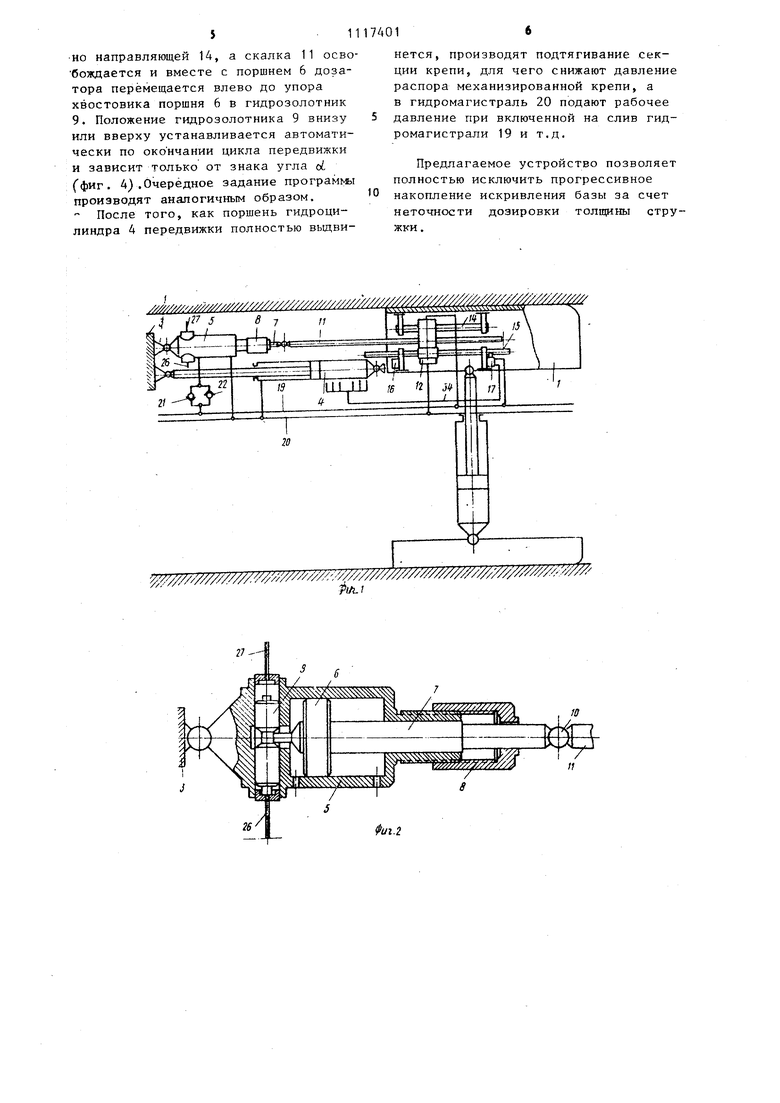
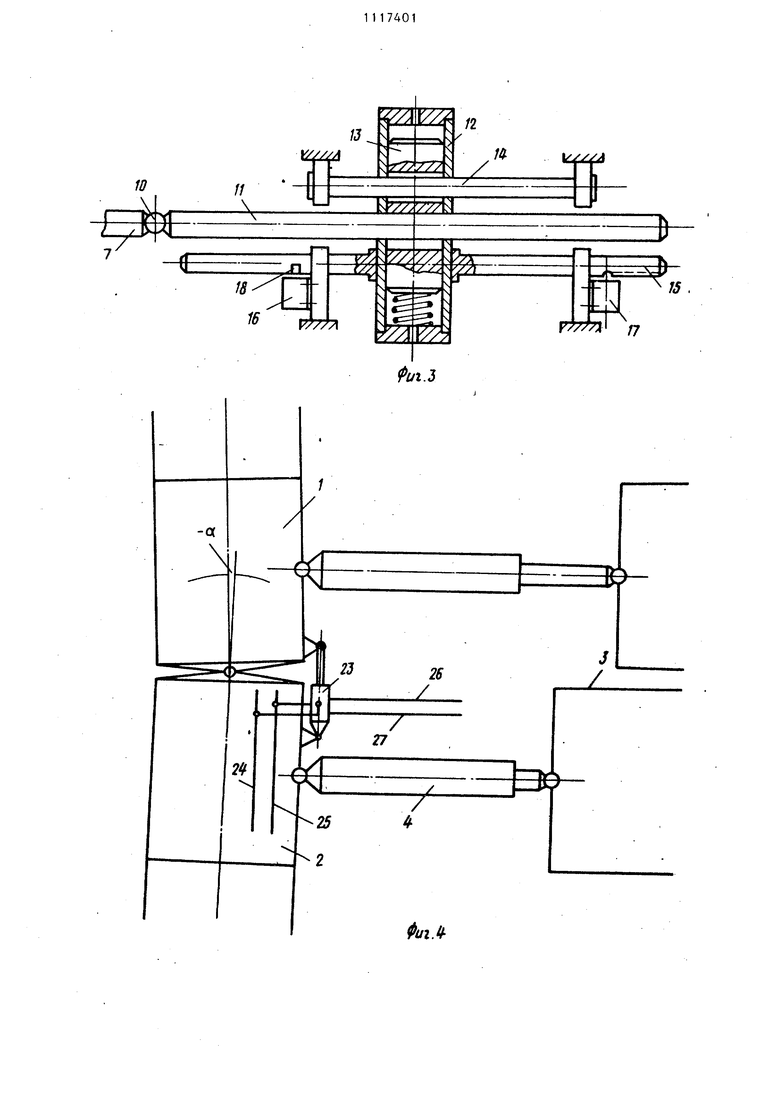
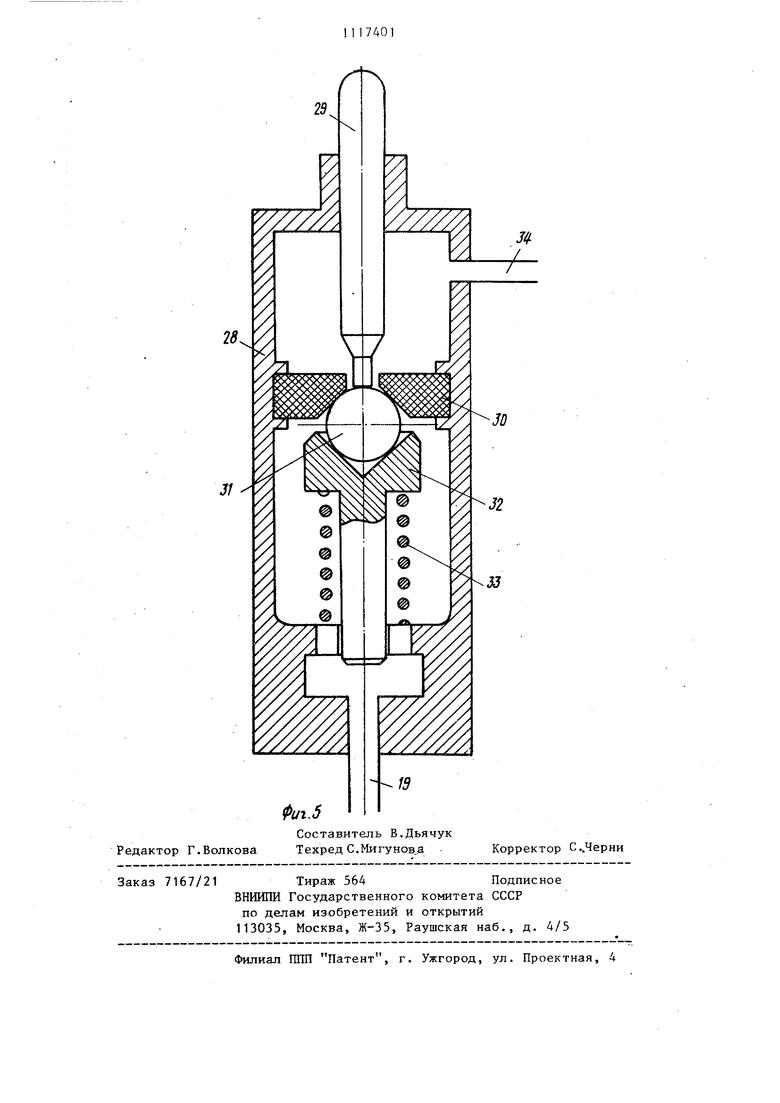
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 линейный гидравлический дозатор; на фиг. 3 - механизм гидрозахвата, на фиг. 4 - схема расположения на базе измерительного элемента угла рассогласованияi на фиг. 5 - гидропереключатель.
Устройство содержит жесткие линейные прогоны базовой балки 1 и 2, секции 3 крепи, гидроцилиндры 4 передвижки базовойбалки.
В качестве задающего элемента толщины стружки в нем применен линейный гидравлический дозатор, установленньш на пассивной секции крепи, шток которого посредством скалки соединен с механизмом гидрозахвата системы шагания. Линейный гидравлический дозатор состоит из цилиндра 5, поршня, 6, штока 7, втулки 8 регулировки толщины стружки и управляемого плавающего гидрозолотника 9 с кольцевой проточкой. Шток линейного дозатора при помощи шарнира 10 соедине со скалкой 11, которая проходит чере цилиндр 12 и подпружиненный поршень 13 механизма гидрозахвата. В комплек механизма гидрозахвата входит также неподвижная направлякнцая 14, которая проходит через цилиндр и поршень механизма гидрозахвата и неподвижно закреплена ка базовой балке, он включает в себя также, звено 15 жесткой обратной связи с кольцом посредине, с помощью которого оно надето на цилиндр гидрозахвата. Плечи звена жесткой обратной связи свободно прохдят через фиксированные направляющие, установленные на базе. На левой направляющей -установлен магнитоуправляемый датчик 16 контроля исполнения команд, а на правой - гидропереключатель 17 (управлякиций элемент регулятора). В соответствии с местом установки датчика и гидропереключателя на одном плече звена жесткой обратной связи установлен (вмонтирован в него) постоянный магнит 18, а на другом - выбран паз, с помощью которого производится включение и выключение гидропереключателя. Устройство содержит также две гидромагистрали 19 и 20 и два обратных клапана 21 и 22. В качестве измерительного элемента угла рассогласования линейных прогонов базы применен двухлинейный гидропереключатель 23. Кроме того, устройство содержит вспомогательные гидромагистрали 24-27.
Гидропереключатель 17 состоит из корпуса 28, нажимного штифта или толкателя 29, седла 30, впрессованного в корпус, шарика 31, подпружиненного сухаря 32, прижимающего пружиной 33 шарик к седлу. ГиДропереключатель является однолинейным клапаном, имеющим два входа: один со стороны подпружиненного сухаря, к которому подсоединена гидромагистраль 19, а другой - со стороны толкателя 29 соединен с.гидромагистралью 34, связанной с группой гидроцилиндров 4.
Устройство работает следующим образом.
В исходном положении перед заданием программы передвижки поршень 6 линейного дозатора занимает крайнее левое положение, гидропереключатель 17 в этот момент закрыт, а поршень 13 мехайизма гидрозаувата поджат в верхнее положение и зафиксирован относительно неподвижной направляющей 14. Обратный клапан 21 нормальн зарегулирован на 40-50 атм при рабочем давлении гидросистемы ISOZOO атм.
Ввод задания на передвижку и собственно передвижка базовой балки осуществляются дистанционно оператором путем подачи рабочего давления в гидромагистраль 19 и одновременного переключения на слив гидрома.гистрали 20. В результате поршень 13 механизма гидрозахвата опускается
вниз прежде, чем откроется клапан 21, При этом цилиндр механизма гидрозахвата освобождается относительно направляющей 14 и фиксируется относительно скалки 11.
При достижении в гидромагистрали 19 давления 40-50 атм открывается обратньш клапан 21. поршень 6 дозатора, а вместе с ним и цилиндр 12
механизма гидрозахвата перемещаются вправо до упора поршня 6 во втулку 8, т.е. на величину задания толщины стружки.
в результате этого звено 15 жесткой обратной связи открывает гидропереключатель 17-и во все гидроцилиндры 4 передвижки данной контролируемой точки подается рабочее давление.
Аналогичные операции независимо друг от друга происходят и во всех группах управления базой. Начинается хаотическое (несинхронное) перемещение участков базовой балки, при котором все механизмы гидрозахвата неподвижны в пространстве. Каждая контролируемая точка базовой балки двигается до тех пор, пока соответствующее звено 15 жесткой обратной связи не выключит гидропереключатель 17 и не произойдет отсечка подачи рабочей жидкости в гидроцилиндры 4 передвижки. Если данная контролируемая точка полностью перемещается на величину задания, то магнит 18 совмещается с магнитоуправлясмым датчиком 16 и на табло оператора фиксиру-ется окончание рабочего цикла-данной контролируемой точки. В противном случае фиксируется аварийная ситуация и оператор должен принимать
меры по ее ликвидации.
Абсолютно точно отработать заданный шаг передвижки невозможно, поэтому понятие полностью переместиться на величину задания следует понимать условно. Заданный шаг передвижки считается отработанным, если в момент отключения гидросистемы в зоне допустимого отклонения находятся все контролируемые точки базы.
После очередного прохода струга
системы задания программы вновь при- водится в исходное положение. Для этого гидромагистраль 19 переключают на слив, а.в гидромагистраль ;
5 20 кратковременно подают давление до 10-15 атм. В момент переключения гидросистемы поршень 13 механизма гидрозахвата фиксируется относительJ -11
но направляющей 14, а скалка 11 освобождается и вместе с поршнем 6 дозатора перемещается влево до упора хвостовика порщня 6 в гидрозолотник 9. Положение гидрозолотника 9 внизу или вверху устанавливается автоматически по окончании цикла передвижки и зависит только от знака угла d (фиг. 4).Очерёдное задание программы производят аналогичным образом.
После того, как поршень гидроцилиндра 4 передвижки полностью вьщви16
нется, производят подтягивание секции крепи, для чего снижают давление распора механизированной крепи, а в гидромагистраль 20 подают рабочее давление при включенной на слив гидромагистрали 19 и т.д.
Предлагаемое устройство позволяет полностью исключить прогрессивное накопление искривления базы за счет неточности дозировки толщины стружки.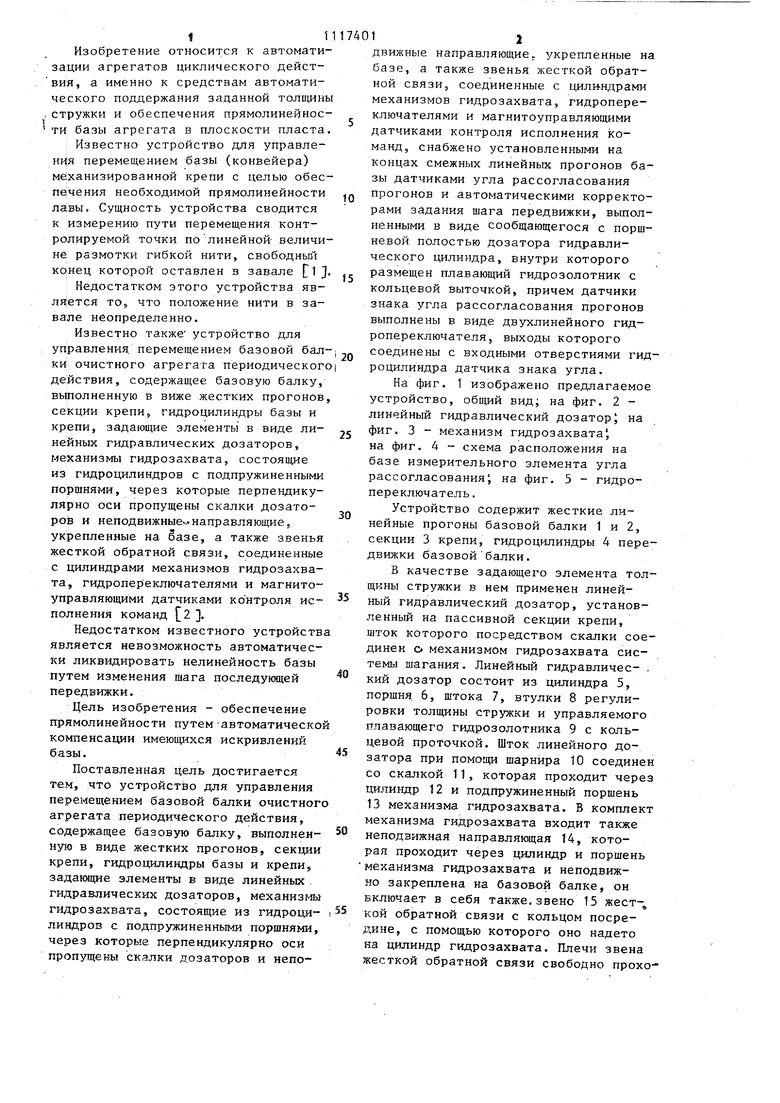
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления перемещением базовой балки очистного агрегата циклического действия и устройство для его осуществления | 1980 |
|
SU911031A1 |
| Механизированная крепь | 1979 |
|
SU800381A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для бурения шпуров и скважин | 1980 |
|
SU939758A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| Гидропривод бульдозера | 1982 |
|
SU1155685A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Гидросистема секции механизированной крепи | 1984 |
|
SU1213212A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ БАЗОВОЙ БАЛКИ ОЧИСТНОГО АГРЕГАТА ПЕРИОДИЧЕСКОГО ДЕИСТ ВИЯ, содержащее базовую балку, выполненную в виде жестких прогонов, секции крепи, гидроцилиндры базы и крепи, задающие элементы в виде линейных гидравлических дозаторов, механизмы гидрозахвата, состоящие из гидроцилиндров с подпружиненными поршнями, через которые перпендикулярно оси пропущены скалки дозаторов и неподвижные направляющие, укрепленные на базе, а также звенья жесткой обратной связи, соединенные с цилиндрами механизмов гидрозахвата, гидропереключателями и магнитоуправляющими датчиками контроля исполнения команд, отличающееся тем, что, с целью обеспечения прямолинейности путем автоматической компенсации имеющихся искривлений базы, оно снабжено установленными на концах смежных линейных прогонов базы датчиками угла рассогласования прогоо нов и автоматическими корректорами задания шага передвижки, выполнен(J ным в виде сообщающегося с поршневой полостью дозатора гидравлическоС го цилиндра, внутри которого размещен плавающий гидрозолотник с кольцевой выточкой,причем датчики знака угла рассогласования прогонов выполнены в виде двухлинейного гидропереключателя, выходы которого соединены с входными отверстиями гидроцилиндра датчика знака угла. с
10
т
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исследование способов замеров положения очистного забоя | |||
| - Глюкауф, 1974, № 23, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Механизированная крепь | 1979 |
|
SU800381A1 |
