1
Изоброте111 с относится к текстильной iipoMbiiiijionHOCTH и может быть использовано (1.1Я стабилизации натяжения основы в нро- ц( n;i|Ki6oTKH ткани, например, на ткал- ком ;-т,.
MaiiLTTOH основной регулятор, содержавши датчик натяжения основы, связанный чсрез 6;ioK уп)авления с регулируемым при- (юаом навоя.
Однако известный регулятор характеригзуотся недостаточно В1)1сокой точностью ре- ули)ов,чния ГЦ1Н наработке ткани с несколь- HfiBoesi, nosTONfy необходима установка датчико натяжения основы для каждого наluni.
llpeллaIao ый .1егулятор отличается , ч го он снабжен датчиком скорости гьсма ткани, CF5язaнны с блоком управле- 1Г.1Я, а .иичик Натяжения основы установ- .ifH на г)уднице ткацкого станка и выполiiiH в вяцг преобразователи механического аавлония электрический сигнал, например в виде тензорезистора.
Па чР1)теже дана схема предлагаемого чм-улятора.
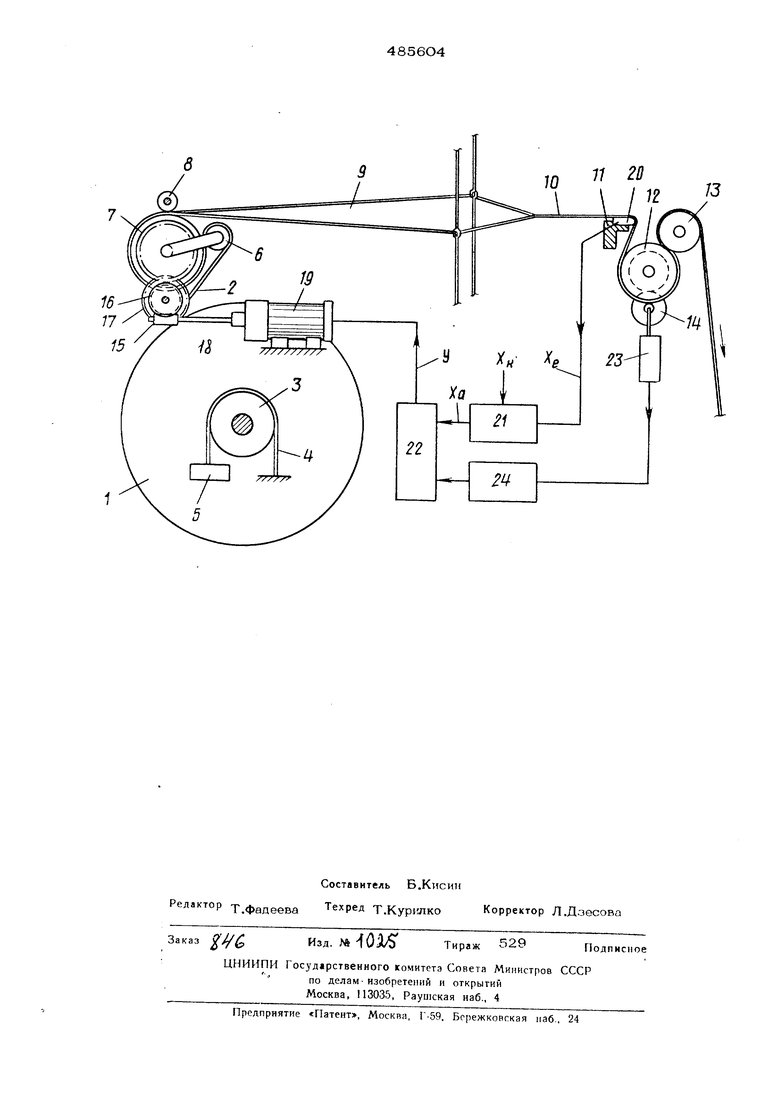
Навой 1 с основой 2 находится нод действием тормоза, вынолненного в виде тормозного барабана 3, который обхвачен канатом 4 с грузом о. Основа 2 носледо- вательно огибает направляющий валик 7 и нрижимается к носледнему нри помощи нажимного валика 8.
Основа 2 образует зев 9. Готовая ткань 10 надравляется через грудницу 11 на приемный вальян 12, а затем через направляющий ва.чик 13 на товарный валик (на чертеже не доказан). Приемный вальян 12 получает враще1и1е от механизма 14.
Питающ1Й валик 7 приводится через механическую передачу, содержащую червяк 15 с червячным колесом 1G и закрепленное на оси питающего валика 7 зубчатое колесо 17. Червяк 15 связан с валрм 18 регулируемого привода 1 9.
На груднине 11 установлен датчик натяжения ткани 20, а следовательно, и осно- вы 2, который через сравниваюигее устройсво 21 связан с регулирующим блоком 22, управляющим приводом 1 9. Для компенсации возмущающих воздействий приемного
а.,
вальяна 12, вызванных изменением натяженвя ткани 1О, установлен датчик во, мушаюшего воздействия 23, который через согласующий элемент 24 связан с регулирующим блоком 22.
Регулятор работает следующим образом. Основа 2 находится под постояшшм натяжением благодаря торможению навоя 1, которое обеспечивает тормозной барабан 3; Нити основы 2, проходя через направляюошй валик 6, питающий валик 7 и прижимной ваанк 8, образуют зев 9. В результ ате прокладывания УТОЧНЫХ нитей (уточная нить на чертеже на показана) через зев 9 вырабатывается готовая ткан Ю, которая через грудницу 11 направляется на приемный вальян 12, а затем через направляющий валик 13 на товарный валик (направление движения ткани показано стрелкой).
Датчик натяжения ткани 20 (например, тензорезистор) непрерывно измеряет давление (натяжение), производимое тканью 1О на грудницу 11. Так как натяжение ткани 1 р равно натяжению основы 2, то -аыход. ной сигнал Xg датчика 20 соответствует натяжению основы. Сигнал Xg в устройства 21 сравнивается с сигналом Хц .соответствующим заданному значению натяжения основы 2. Сигнал рассогласования X (выход сравнивающего устройства 21 ) поступает IB регулирующий блок 22, вырабатывающий сигнал управления У, который воздействует 1на регулирующий привод 19. Выходной вал
,4,
18 19 через червяк 15 с червячным колесом 16 и зубчатое колесо 17 изменяет скорость питающего валик 8, та чтобы натяжение основы 2 стало равным заданному.
Так как на натяжение основы влияет скорость наработки ткани, в регуляторе установлен датчик скорости съема ткани .(датчик возмущающего действия) 23, выходной сигнал ;крторргр через согласующий элемент 24 поступает на регулирующий блок 22,1Ввеаеняе в регулятор контура регулирования по возмущению позволяет облегчить режим работы контура регули рованвя (датчик 11, сравнивающее устройство 21, регулирующий блок 22) и тем самым повысит| динамическую точн&сть регулятора основы.
Предмет изобретения
Основный регулятор, например, ткацкого станка, содержащий датчик натяжения основы, связанный через блок управления с регулируемым приводом навоя, отличающийся тем, что, с целью по1вышения точности регулирования натяже- . ния основы, он снабжен датчиком скорости съема тканн, связанным с блоком управления, а датчик натяжения основы установлен на груцница ткацкого станка и выполнен в виде преобразоэателя маханичесг кого давления в электрический сигнал. 7/ 2В
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Способ ткачества | 1987 |
|
SU1423646A1 |
| Ткацкий станок для выработки махровой ткани | 1973 |
|
SU513632A3 |
| Ткацкий станок | 1979 |
|
SU848493A1 |
| Способ формирования ткани на ткацком станке | 1989 |
|
SU1668502A1 |
| ТОВАРНЫЙ РЕГУЛЯТОР БЕСЧЕЛНОЧНОГО ТКАЦКОГО СТАНКА | 1990 |
|
RU2027806C1 |
| Ткацкий станок для формирования трехосной ткани | 2024 |
|
RU2832522C1 |
| Ткацкий станок | 1989 |
|
SU1622449A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАТЯЖЕНИЕМ НИТИ ОСНОВЫ В ТКАЦКОМ СТАНКЕ | 1993 |
|
RU2070237C1 |
| Круглый ткацкий станок | 1952 |
|
SU98891A1 |