1
Изобретение относится « подъемно-траиспортному оборудаваняю, а именно « захвата-м для грузов, снабженных юкобаади или кольцами.
Известен захват для подъема и траиспортироваа-пия грузов, содержащей зах1ва11ный орган, снабженный демпфирующим устройством, выполненным в виде гидроцилИйдра 1моментпого действия с поводком и осью, на которой смонтированы лопа1сти -с ат1вер1стия1ми.
Эти захваты «вдоСтаточ-но надежны в работе, .поскольку они не обеснечив ают (регулировку -истечения тормозной жидкости в завИснмости от .направления -перемещения захватных элементов.
Для повышения надежности р.аботы в предлагаемом захвате на лопаюти ша риирио за1крбнлены по|дпружи1ненные нл-астины со съемными жиклер-а-ми, устаиовленными иалротив отверстий -и снабженными .калиброванными от-верстиями.
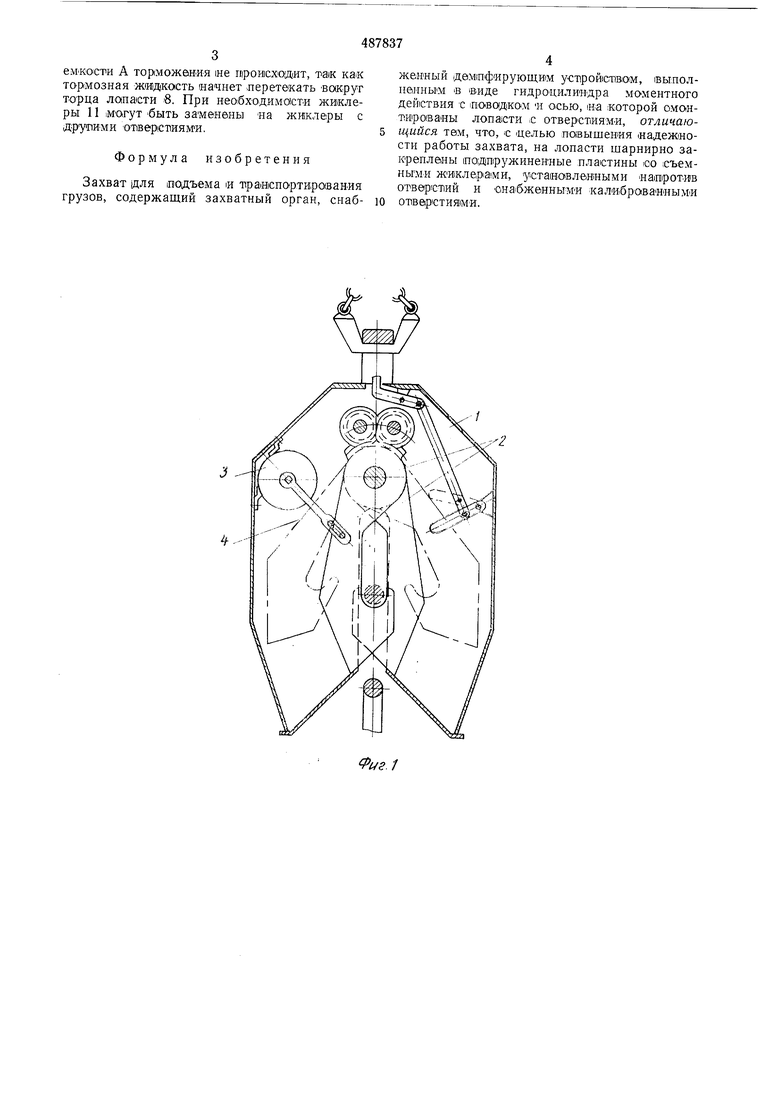
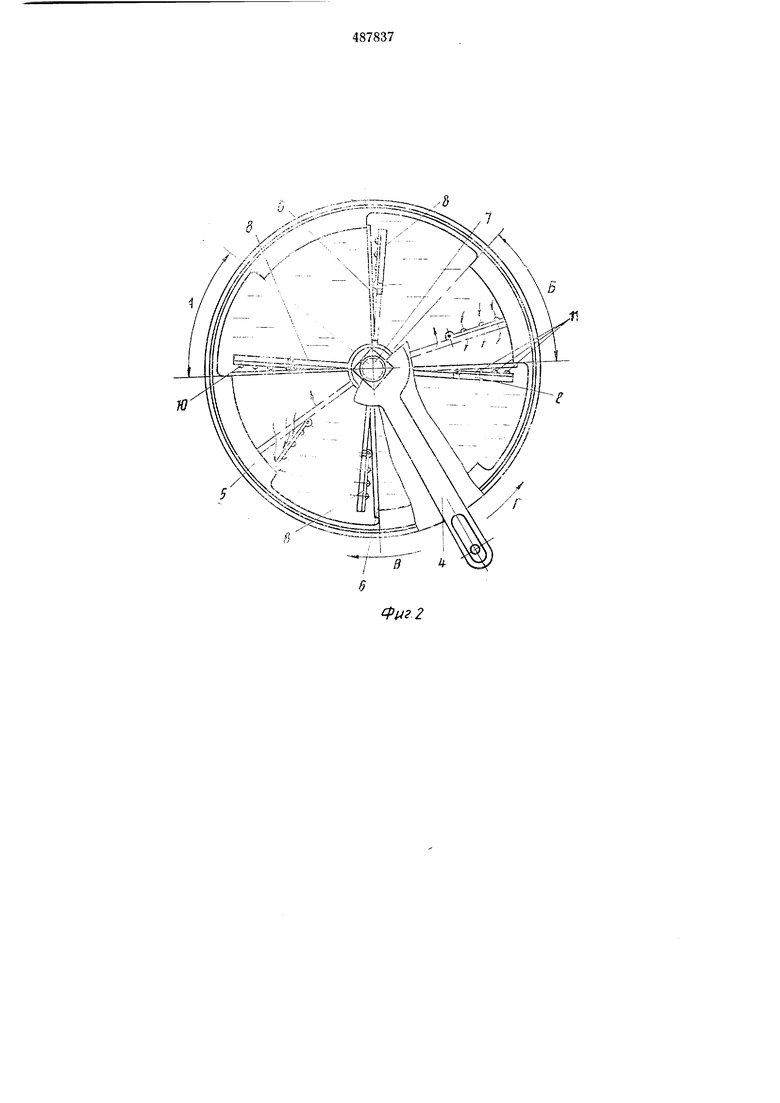
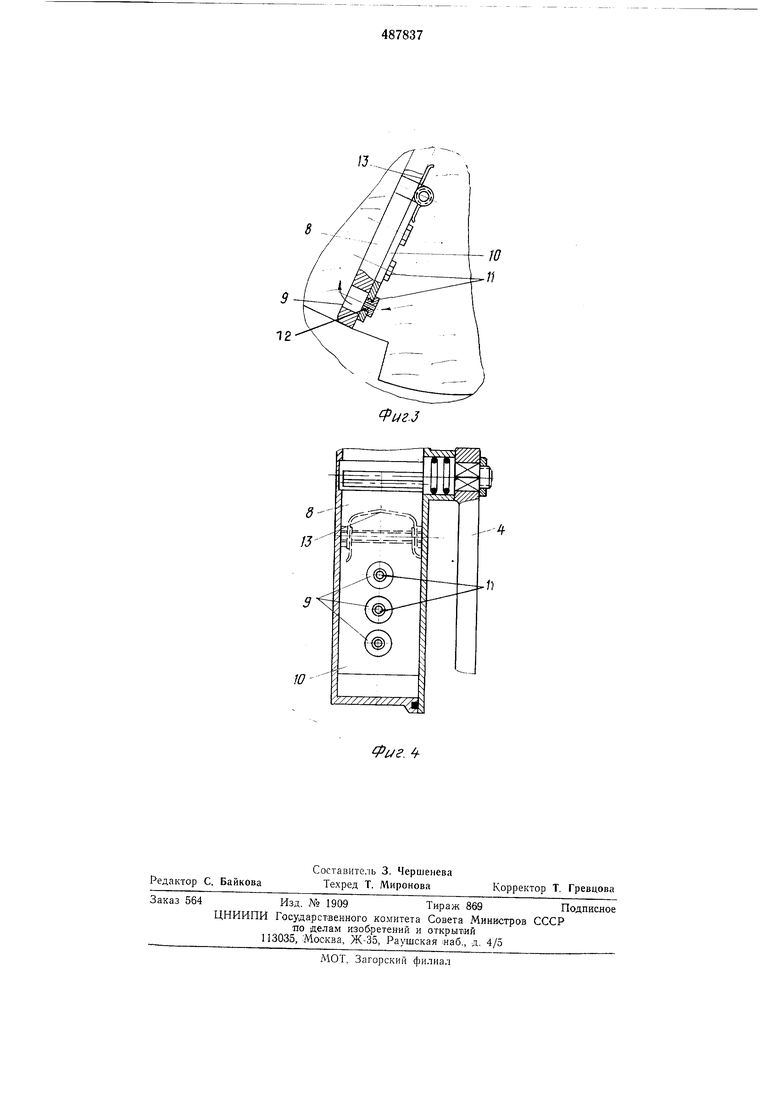
На фиг. 1 изображен описываемый захват в раз-резе с двм пфирующим 1стройст1вом; 1на фиг. 2 -демпфирующее устройство в ра.зрезе; на фиг. 3 - узел крепления жиклеров да .нластинах; -на фиг. 4 - вид лопасти с пластинами.
Захват содержит корпус 1 с щарнирно-закренленнымн в нем захватными рычагами 2 и
демлфи.рующим устройствоМ 3, с-вязанБым новодкол 4 -с рычагами 2.
Дем нфирующее устройство выполнено в виде пидроцилиндра момвнтного действия 5,
разделенного перегородка;ми 6 на несколько секций. Каждая секция имеет два отделения: большей Л и меньшей Б ем1косги. На -оси 7 циЛИН-дра, овязанной с шоводком 4, уста-новлены лопасти 8, в которых выполнены отверстия 9.
Последние закрыты пластпиами 10, с установленнымИ на -них съемиыми жиклерами 11 с кал-иброваины:ми отверс-тиямн 12 -и -поджатыми к лопастям Пружииами 13, лрамем жтаклеры установлены напротив отверстий 9.
При ра-окрытш1 захватных рычагов 2 ось 7 демпфирующего устройства 3 приводится в действие ио1во|дком 4 в на пра влении стрел-кн5. Тормозная жидкость отжнмает пластины 10 и свободно перетекает из одной секции .в д-ругую. Перемещение пластин 10 будет прои-сходить вплоть до соприкосновения ло-пастей 8 с
перегородкам-и 6, после чего пружинами 13
пластины 10 будут .поджаты к лапастя-м 8.
При замыкании захватных рычагов 2 поводок 4 -поворачивает лопа-сти 8 в «аправлен-ин стрелий Г и в зоне меньшей емкости Б происходит торможение захватных рычагов за счет -медленного иеретекания тормозной жидкости через кал:иброва-Н1Ные отверстия 12 жиклеров 11. При входе л-онасти 8 в зону большей
eMKOiCTH A торможения ие nipoисходит, так как тормозная жидкость начнет .перетекать вожруг торца лапа1сти в. При нео1бходимасти жижлеры 11 iMoryT быть заменены -на жиклеры с друпНМИ от1вер|СТ1ИЯми.
Формула изобретения
Захват щля подъема « т1ра1Н1Снорти,рования грузов, содержащий захватный орган, снабженный двмифирующиад успройютвом, ЕЫЛОЛпбнныМ В 1В«де гидроцилиндра моментното действия С ловадком и осью, 1на которой омонтироваиы лопасти с отверстиями, отличающийся тем, что, с щелью повышения .надежности работы захвата, на лопасти шарнирно закреплены оодшружиненные пластины со съемными ЖИ1Клера МИ, установленными «аиротив отверстий и она-бженнымИ Кал1иброва««ым И отверстиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов, снабженных скобой | 1971 |
|
SU479718A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| Шарнирно-сочлененная стрела грузоподъемного механизма | 1982 |
|
SU1054287A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Гидравлическая система погрузчика | 1991 |
|
SU1827444A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Гидравлическая система погрузчика | 1991 |
|
SU1827443A1 |
иг.
