линдр 5, основной противовес 6. Допол-25 шарнирно-рычажнои системы манипулятора
нительный противовес 7 закреплен на свободном конце рычага 8, связанного с опорным шарниром 9 грузовой стрелы 4, размещенным в вертикальном пазу 3.
в вертикальной плоскости осуществляе ся путем добавления съемных элементо 12 к противовесу 7. На траверсе 13 усилие от веса захватного органа 26
На рычаге 8 закреплен ролик 10, кото- зо чеРез подвижную часть 16 передается
на балансирный рычаг 25 и через подпружиненный элемент 24 - на чувстви- тегакое устройство 23, в котором фор мируется пневмосигнал, соответствующ массе захватного органа 26. В мембра ном устройстве 33 этот сигнал усилив ется в силовой цилиндр 5, от источни ка питания 32 подается порция сжатог воздуха. Так как манипулятор сбалансирован, то силовой цилиндр 5 будет стремиться переместить опорный шарни 9 грузовой стрелы 4 в верхнее положе ние вертикального паза 3 стойки 2. С помощью винта 29 регулируется усил
рый установлен на горизонтальной направляющей 11, закрепленной HI стойке 2. Дополнительный противовес , зь- полнен наборным со съемными эломелга- ми 12.
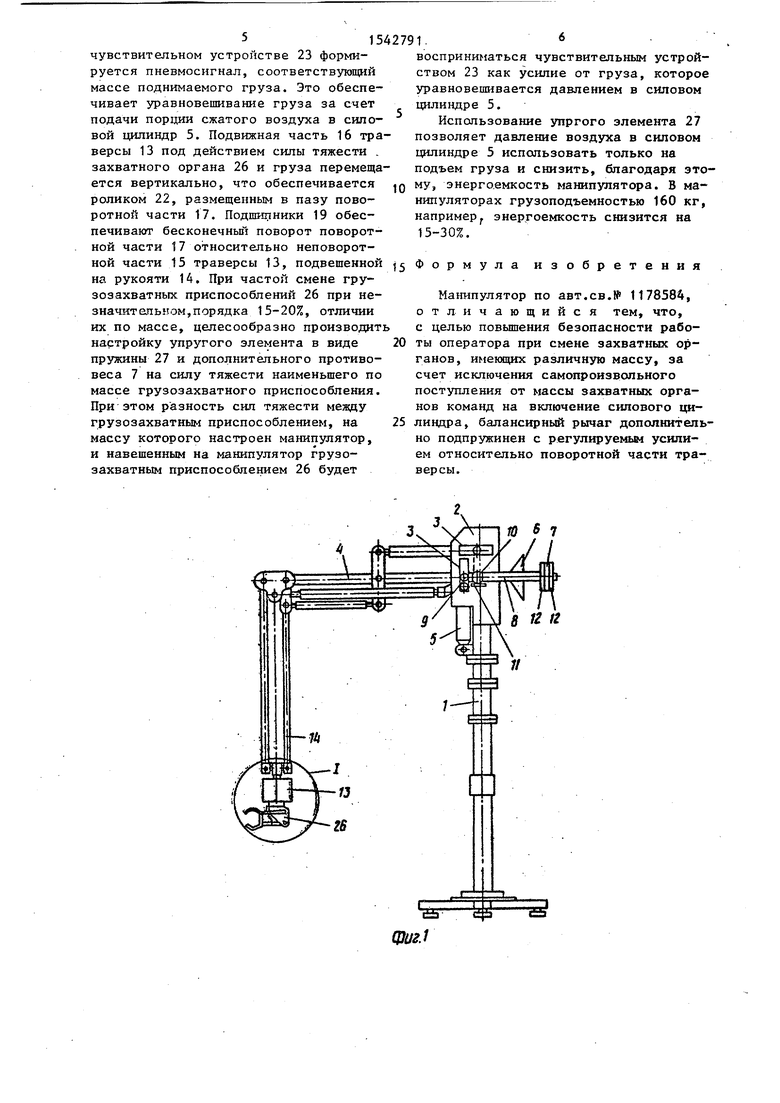
Траверса 13, подвешенная на рукояти 14S смонтированной нг1 конце стрелы 4, содержит неповоротную часть 15, подвижную 16 и поворотную 17. На неповоротной части 15 закреплена полая ось 18, на которой в подшипниках 19 смонтирована поворотная часть 17. Подвижная част.ь 16 связана с поворотной
на балансирный рычаг 25 и через подпружиненный элемент 24 - на чувстви- тегакое устройство 23, в котором фор мируется пневмосигнал, соответствующи массе захватного органа 26. В мембра ном устройстве 33 этот сигнал усилив ется в силовой цилиндр 5, от источни ка питания 32 подается порция сжатог воздуха. Так как манипулятор сбалансирован, то силовой цилиндр 5 будет стремиться переместить опорный шарнир 9 грузовой стрелы 4 в верхнее положение вертикального паза 3 стойки 2. С помощью винта 29 регулируется усили
частью 17 посредством стойки 205 одним концом жестко закрепленной на 5 у сжатия пружины 27, тем самым ком- подвижной части 16, а другим - шарнир- пенсируется усилие Ргр прот силы тяже
но соединенной с горизонтальным рычагом 21. Стойка 20 снабжена направляющим роликом 22, размещенным в вертикальном пазу поворотной части .Чувствительное устройство 23 установлено в неповоротной части 15. Подпружиненный элемент 24 размещен внутри полой оси 18 и одним концом контактирует с чувствительным устройством 23, а другим - через балансирный рычаг 25 - с Подвижной частью 16, на которой кре- Пится захватный орган 26. Упругий элемент в виде пружины 27 установлен межсти захватного органа. При этом снимается пневмосигнал, поступающий от чувствительного устройства 23. Регу- 5Q лировка сжатия пружины 27 производится до тех пор, пока не прекратится самопроизвольное перемещение вверх грузовой стрелы 4. При захвате груза усилие нагруженкя, равное Р Ргр+
Ф
55
Р,
Гр Пр где Ргр- вес груза, лереда- ется на балансирный рычаг 25. При это усилие Ргр Пр компенсируется усилием пружины 27, а на чувствительное устройство 23 передается усилие Ргр . В
в вертикальной плоскости осуществляется путем добавления съемных элементов 12 к противовесу 7. На траверсе 13 усилие от веса захватного органа 26
чеРез подвижную часть 16 передается
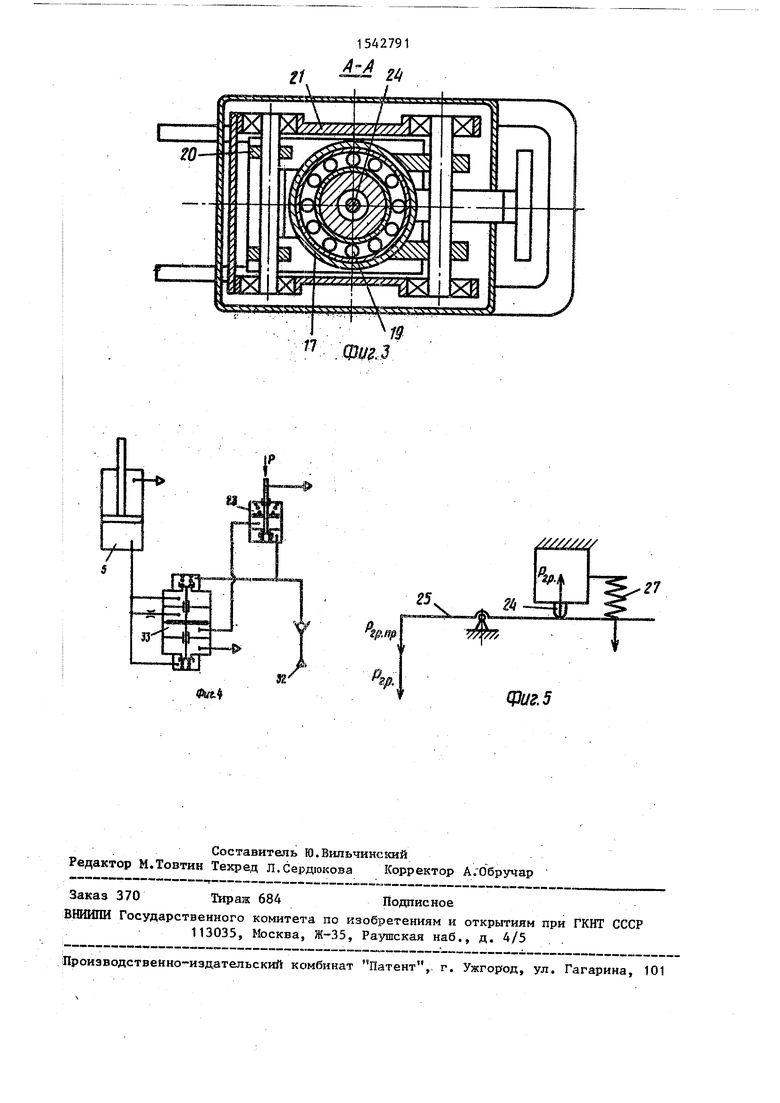
на балансирный рычаг 25 и через подпружиненный элемент 24 - на чувстви- тегакое устройство 23, в котором формируется пневмосигнал, соответствующий массе захватного органа 26. В мембранном устройстве 33 этот сигнал усиливается в силовой цилиндр 5, от источника питания 32 подается порция сжатого воздуха. Так как манипулятор сбалансирован, то силовой цилиндр 5 будет стремиться переместить опорный шарнир 9 грузовой стрелы 4 в верхнее положение вертикального паза 3 стойки 2. С помощью винта 29 регулируется усилие
у сжатия пружины 27, тем самым ком- пенсируется усилие Ргр прот силы тяже
у сжатия пружины 27, тем самым ком- пенсируется усилие Ргр прот силы тяже
сти захватного органа. При этом снимается пневмосигнал, поступающий от чувствительного устройства 23. Регу- лировка сжатия пружины 27 производится до тех пор, пока не прекратится самопроизвольное перемещение вверх грузовой стрелы 4. При захвате груза усилие нагруженкя, равное Р Ргр+
Ф
Р,
Гр Пр где Ргр- вес груза, лереда- ется на балансирный рычаг 25. При этом усилие Ргр Пр компенсируется усилием пружины 27, а на чувствительное устройство 23 передается усилие Ргр . В
15
чувствительном устройстве 23 формируется пневмосигнал, соответствующий массе поднимаемого груза. Это обеспечивает уравновешивание груза за счет подачи порции сжатого воздуха в силовой цилиндр 5. Подвижная часть 16 траверсы 13 под действием силы тяжести захватного органа 26 и груза перемещается вертикально, что обеспечивается роликом 22, размещенным в пазу поворотной части 17. Подшипники 19 обеспечивают бесконечный поворот поворотной части 17 относительно неповоротной части 15 траверсы 13, подвешенной на рукояти 14. При частой смене грузозахватных приспособлений 26 при незначительном,порядка 15-20%, отличии их по массе, целесообразно производит настройку упругого элемента в виде пружины 27 и дополнительного противовеса 7 на силу тяжести наименьшего по массе грузозахватного приспособления. При этом разность сил тяжести между грузозахватным приспособлением, на массу которого настроен манипулятор, и навешенным на манипулятор грузозахватным приспособлением 26 будет
1542791
5ф°РмУла и
восприниматься чувствительным устройством 23 как усилие от груза, которое уравновешивается давлением в силовом цилиндре 5.
Использование упргого элемента 27 позволяет давление воздуха в силовом цилиндре 5 использовать только на подъем груза и снизить, благодаря это- 0 му, энергоемкость манипулятора. В манипуляторах грузоподъемностью 160 кг, напримерг энергоемкость снизится на 15-30%.
зобретения
Манипулятор по авт.св.№ 1178584,
отличающийся тем, что, с целью повышения безопасности рабо0 ты оператора при смене захватных органов, имеющих различную массу, за счет исключения самопроизвольного поступления от массы захватных органов команд на включение силового ци5 линдра, балансирный рычаг дополнительно подпружинен с регулируемым усилием относительно поворотной части траверсы.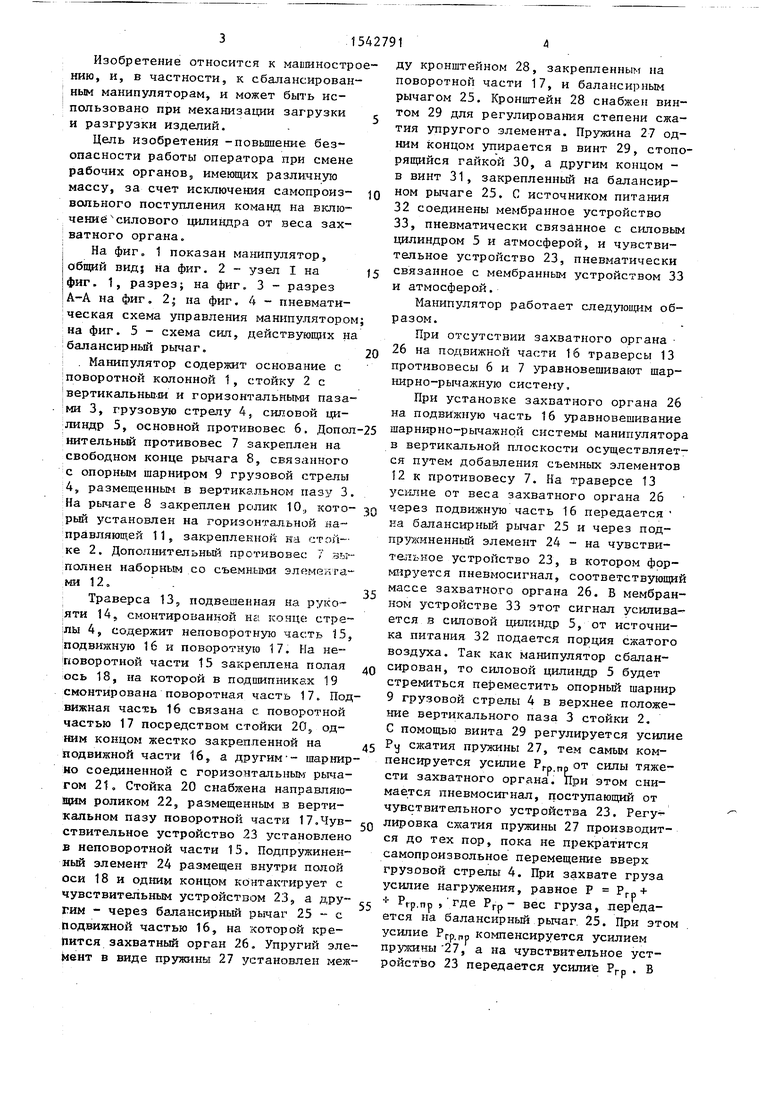
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ замены грузозахватных приспособлений самоуравновешивающегося манипулятора | 1986 |
|
SU1648888A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Манипулятор | 1985 |
|
SU1502292A2 |
| Кран-манипулятор | 1988 |
|
SU1668278A1 |
| Уравновешивающий подъемник | 1985 |
|
SU1271818A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Погрузочный манипулятор | 1984 |
|
SU1216148A1 |
| Уравновешивающий подъемник | 1982 |
|
SU1039861A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Уравновешивающий подъемник | 1981 |
|
SU988751A1 |
Изобретение относится к машиностроению, в частности к сбалансированным манипуляторам, и может быть использовано при механизации загрузки и разгрузки изделий. Целью изобретения является повышение безопасности работы оператора при смене рабочих органов, имеющих различную массу, за счет исключения самопроизвольного поступления команды на включение силового цилиндра от массы захватного органа. Усилие от массы захватного органа 26, закрепленного на подвижной части 16, компенсируется упругим элементом 27. Осевое усилие, развиваемое им регулируется винтом 29. При этом балансирный рычаг 25 не поворачивается и не нажимает на элемент 24, взаимодействующий с чувствительным устройством 23, вырабатывающим сигнал на подачу сжатого воздуха в силовой цилиндр для подъема стрелы манипулятора. 5 ил.
Ю 7
сэ
Фиг.$
OKfcJ
/////////
Фиг. 5
| Манипулятор | 1983 |
|
SU1178584A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
