(54) СИСТЕМА РЕГУЛИРОВАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с переменной структурой | 1979 |
|
SU849141A1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| Формирователь сигналов с линейной частотной модуляцией | 1990 |
|
SU1826119A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Регулятор с переменной структурой | 1979 |
|
SU954929A2 |
| КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ СИСТЕМЫ РАДИОСВЯЗИ | 2013 |
|
RU2539334C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ОПТИЧЕСКОГО СИГНАЛА СУММИРОВАНИЕМ ПУЧКОВ ИЗЛУЧЕНИЯ N ЛАЗЕРОВ В ВЕРШИНЕ КОНИЧЕСКОЙ ПОВЕРХНОСТИ И ПЕРЕДАТЧИК КОГЕРЕНТНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, РЕАЛИЗУЮЩИЙ ЭТОТ СПОСОБ | 1992 |
|
RU2109384C1 |
| РЕЗОНАНСНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ | 1993 |
|
RU2072619C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Телевизионная система для наблюдения за перемещением горячего проката | 2020 |
|
RU2727527C1 |

1
Изобретение относится к системам с измененной структурвй регулирования и может найти широкое применение при управлении динамическими объектами регулирования, например, летательными аппаратами, при наличии ограничений на фазовые координаты системы.
Известна система регулирования инерционными объектами при ограничении управляющего воздействия, содержащая по- JQ следовательно соединенные усилитель-преобразователь и исполнительный орган с нелинейной характеристикой типа насыщение, выход которого соединен со вхоДом объекта регулирования, выход которого is соединен с одним из входов усилителя преобразователя, и последовательно соединенные формирователь сигнала,, ощибки дифференциатор, суммирующий усилитель и триггер, выход которого соединен со 20 вторым входом исполнительного оргавй причем входы усилителя-преобразователя соединены с соответствующими формировптеля сигнала ошибки Ij ,
Недостатком известной системы 5тляются низкие устойчивость и быстродействие.
Известна система регулирования, содер. жащая последовательно соединенные датчик регулируемого параметра, регулятор скорости, блок сравнения, регулятор тока, силовой преобразователь и исполнительный двигатель, первый выход которого соединен с датчиком регулируемого параметра, а второй - со вторым входом блока сравнения 2J ,
Недостатком известной системы является ее низкая точность.
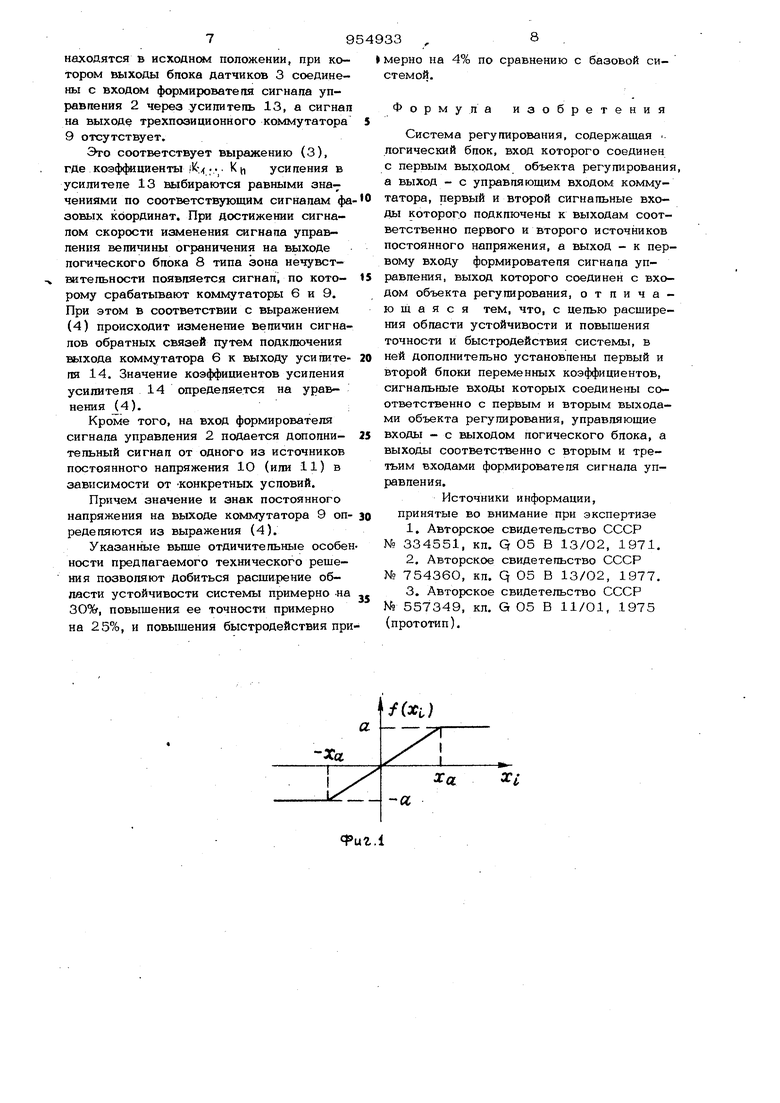
Из известных систем наиболее близкой по технической сущности является система регулирования, содержащая датчик регулируемого параметра, выход которого соединен с выходом объекта регулирования, а выход - с вычислителем текущего значения целевой функции, выход которого через логическое устройство соединен с управляющим входом коммутатора, к сигнальным входам которого подключены выходы соответствующих источников постоянного напряжения, выход которого через интегратор подключен к одному из входов сумматора, другой вход которого подключен к выходу объекта регулирования, а выход через формировател сигнала управления - ко входу объекта регулирования, причем в качестве функции цепи может применяться любая функция, в том числе и единичная з. Недостатком известной системы является ее низкая точность и быстродействие. Цепь изобретения - расширение области устойчивости и повышение точности и быстродействия системы. Поставленная цель достигается тем, что в систему регулирования, содержащую логический блок, вход которого соединен с первым выходом объекта регулирования, а выход - с управляющим входом коммутатора, первый и второй сигнальные входы которого подключены к выходам соответственно первого и второго источников постоянного напряжения, а выход - к первому входу формирЪватепя сигнала управления, выход которого соединен со входом. объекта регулирования, дополнительно введены первый и второй блоки переменных коэффициентов, сигналь ,лые входы которого соединены соответст венно с первым и вторым выходами объекта регулирования, управляющие входы - с выходом логического блока, а вы ходы соответственно с вторым и третьим входами формирователя сигнала управления.,, На фиг. 1 представлена статическая характеристика нелинейного элемента, с насыщением входящего в состав формиро вателя сигнала управления, или объекта регулирования системы; на фиг. 2 - общая функциональная схема системы; на фиг. 3 - один из возможных частных слу чаев реализации общей функциональной схемы системы. Система регулирования содержит динамический объект 1 регулирования, формирователь 2 сигнала управления, блок 3 датчиков, первый 4 и второй 5 блоки переменных коэффициентов коммутатор 6 дифференциатор 7, логический блок 8, коммутатор 9, первый lO и второй 11 источники постоянного напряжения, объект 12 регулирования, усилитель 13 и 14. Также обозначены X - измерительные сигналы (фазовые координаты- системы), Y - сигнал задания, Р - сигнал воэмушения, U - сигнал управления,ilx,) ЫХОДНОЙ сигнал элемента с насыщением, - порог насыщения, YQ - пороговые знаения, фазовой координаты, при которых елинейный элемент входит в область наыщения. Рассмотрим характеристики наиболее ущественных блоков системы. Уравнения движения динамического бъекта регулирования 1 с учетом ограниения фазовой координаты, т.е. с учетом аличия нелинейного элемента с насыщеием, имеют вид --P(x.U), де X (X,..,,Xf,)- вектор сигналов фазовых координат, измеряемых блоков датчиков 3 параметров движения объекта регулирования 1 и исполнительного органа объекта 1; U - сигнал управления динамическим объектом регулирования 1, вектор-функции Р()(, U )вк пючает в себя функциюi(x) вида, учитывающую ограничение сигнала фазовой координаты (см. фиг. 1). f-O.,, , 40, Х Чо,(2) где XQI - пороговые значения сигналов фазовых координат Q - значение цорога насыщения нелинейного элемента. Представленный на фиг. 2 объект регулирования 12, включает в свой состав, исполнительный орган, блок датчиков 3 и, собственно, динамический объект регулирования 1. Этот объект регулирования 1 (см. фиг. 2) имеет две группы выходов, первая из которых представляет собой совокупность выходов на которых формируются сигналы ограниченных фазовых координат, а вторая - неограниченных. Формирователь сигнала управления 2 формирует сигнал управления U вида k,X,f.,.f nXnVV, IXiUXa, ,+,.., Xij+Y, |xj Ха, где величины и знаки коэффициентов К,.,К,К, ,.„ ,К (. зависят от параметров объекта регуцирования 1 и других блоков, входящих в состав неизменной части системы. Первый и второй блоки переменных коэффициентов 4 и 5 имеют дискретно из меняемые коэффициенты усиления, причем число устанавливаемых коэффициентов уси Ленин в каждом блоке определяется в СОответствии с выражением .с...с,ь.лс;, , VN)N 1. - общее число измеряемых сигналов фазовых координат; N - число сигналов фазовых координат на блок переменных коэффициентов Логический блок 8 производит фиксацию выхода соответствующего сигнала фа зовой координаты йибо сигналов ряда координат на ограничение и, в зависимости от ситуации, формирует команды на изменение коэффициентов усиления блоков 4 и 5 и на установку коммутатора 9 в положение, подключающее на свой выход необ ходимый сигнал постоянного напряжения соответствующей величины и знака. ч Источники 10 и 11 положительных и отрицательных постоянных напряжений, ко торые формируют сигналы постоянных напряжений, количество и величина которых определяется полным набором возможных ситуаций выхода сигналов фазовых координат на ограничение. Величины и знаки постоянных напряжений определяются членом выражения (4) Х . Количество устанавливаемых постоянных сигналов на каждом источнике равноМ-С +... С, Выходы блока 3 датчиков сигналов фазовых координат динамического объекта 1 регулирования, не имеющие ограничений, соединены со входами второго блока 5 переменных коэф4ициентов, а выходы блока 3 датчиков сигналов фазовых координат, имеющие ограничения, соединены со входами первого блсжа и переменных коэффициентов и соответствующими входами логического бпока 8 выход которого соединен с управляющими входами блоков 4 и 5 и с управляющим входом коммутатора устройства 9, две группы входов которого соединены с соответствующими выходами источников положительных 1О и отрицательных 11 постоянных напряжений, а выход с первым входом формирователя сигнала управления 2. Вы ход блока 4 соединен со вторым входом формирователя сигнала управления 2, а выход блока 5 - с третьим входом формирователя сигнала управления 2. Система (фиг 2) работает следующим образом. Если сигналы фазовых координат подверженных ограничению не достигли величин ограничений, то управляющий сигнал объекта 12, в соответствии с выражением (3) формируют путем сложения сигналов обратных связей с выходов блоков переменных коэффициентов 4 и 5. При этом значения коэффициентов усиления блоков 4 и 5 соответствуют начальному значению сигнала на выходе логического блока 8, К(лмутатор 9 находится в нулевом положении, и, следовательно, на его выходе отсутствует какое-либо напряжение. При достижении каким-либо сигналом фазовой координаты вегшчины ограничения в логическом блоке 8 происходит фиксация Достижения этим сигналом величины ограничения и формируется команда на подключение соответствующего постоянного напряжения посредством коммутатора 9 на вход формирователя сигнала управления 2 и одновременно на соответствующее изменение коэффициентов усиления блоков 4 и 5. Велишна постоянного напряжения, подаваемого с источника 10 (или 11) с помощью коммутатора 9, выбор положительного Ю или отрицательного 11 источника напряжения и величины коэффициентов усиления блоков 4 и 5 определяются в соответствии с выражением (4). При последующих достижениях сигналами других фазовых координат величин ограничений происходит их фиксация в логическом блоке 8, на выходе которого вырабатывается управляющий сигнал, соответствующий конкретной ситуации, по ко f торому осуществляется изменение величин сигналов обратных связей системы в соответствии с выражением (4) путем соответствующего изменения коэффициентов усиления в блоках 4 и 5 и величины по стоянного напряжения. Коэффициенты К...) определяются видом конкретной ситуации. Система (4мг. 3) работает следующим образом. Если сигнал скорости изменения сигнала управления не достиг величины ограничения, то величина сигнала на выходе дифференциатора устройства 7 меньше величины зоны нечувствительности логического блока 8. .Следовательно, сигнал на выходе логического блока 8 отсутствует. При этом трехпозиционный коммутатор 9 и двухпозиционный коммутатор 6 79 находятся в исходном положении, при котором выходы бпока датчиков 3 соединены с входом формировате гю сигнала управления 2 через усилитепь 13, а сигнал на выходу трехпозиционного коммутатора 9 отсутствует. Это соответствует выражению (3), где коэффициенты ili-.;(;.. Кц усиления в усилителе 13 выбираются равными значениями по соответствующим сигналам фа зовых координат. При достижении сигналом скорости изменения сигнала управления величины ограничения на выходе логического блока 8 типа зона нечувствительности появляется сигнал, по которому срабатывают коммутаторы 6 и 9. При этом в соответствии с выражением (4) происходит изменение величин сигналов обратных связей путем подключения выхода коммутатора 6 к выходу усигште гш 14. Значение коэффициентов усиления усилителя 14 определяется на уравнения 4), Кроме того, на вход формирователя сигнала управления 2 подается дополнительный сигнал от одного из источников постоянного напряжения 10 (или 11) в зависимости от конкретных условий. Причем значение и знак постоянного напряжения на выходе коммутатора 9 оп ределяются из выражения (4). Указанные вьпие отдичительные особе ности предлагаемого технического решения позволяют добиться расширение области устойчивости системы примерно -на ЗО%, повышения ее точности примерно на 25%, и повышения быстродействия пр
Фиг.1 8 33 4% по сравнению с базовой симерно на стемой. Формула изобретения Система регугшрования, содержашая логический блок, вход которого соединен с первым выходом объекта регулирования, а выход - с управляющим входом коммутатора, первый и второй сигнальные входы которого подключены к выходам соответственно первого и второго источников постоянного напряжения, а выход - к первому входу формирователя сигнала управления, выход которого соединен с входом объекта регулирования, отличающаяся тем, что, с целью расширения области устойчивости и повышения точности и быстродействия системы, в ней дополнительно установлены первый и второй блоки переменных коэффициентов, сигнальные входы которых соединены соответственно с первым и вторым выходами объекта регулирования, управляющие входы - с выходом логического блока, а выходы соответственно с вторым и третьим входами формирователя сигнала управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 334551, кл. Q 05 В 13/О2, 1971. 2.Авторское свидетельство СССР № 754360, кл. Q 05 В 13/О2, 1977. 3.Авторское свидетельство СССР № 557349, кл. G 05 В 11/О1, 1975 (прототип).
И
uz.i.
