Изобретение относится к области автоматизации управления ковочными и штамповочными молотами.
Известно устройство дистанционно-программного управления паровоздушиымИ молотами, содержащее пульт управления, управляющий золотник, электропривод с коман-, доаппаратом, на валу которого закреплены кулачки - таймерные диски, а также механизм перемещения толкателя по кулачкам командоаппарата и пневмогидравлический сервопривод.
предложенное устройство отличается от известного тем, что оно снабжено установленной на валу командоаппарата пневмотурбинкой дистанционной корректировки, кинемати-. чески связанной с управляющим золотником молота, соединенным посредством кулачков и толкателя планетарного механизма, по ещенного в корпусе устройства, с таймернымн дисками командоаппарата, при этом вал с таймерными дисками связан с приводным электродвигателем посредством редуктора, обеспечивающего заданную программой скорость его вращения.
Кроме того, валы с таймерными дисками командоаппарата расположены по окрул ности планетарного механизма и кинематически соединены с кулачками планетарного механизма, взаимодействующими посредством
Планки, установленной в корпусе планетарного механизма, с пневматическими цилиндрами пульта управления паровоздушным молотом.
Такое выполнение обеспечивает возможность дистанционной корректировки запрограммированного энергетического режима свободной ковки или горячей штамповки оператором при изменении температурных или
пластических свойств ковки, а также автоматическую запись ходограмм управляющего золотника молота. Устройство выполнено компактным, и конструкцня его позволяет увеличить объем заданной программы.
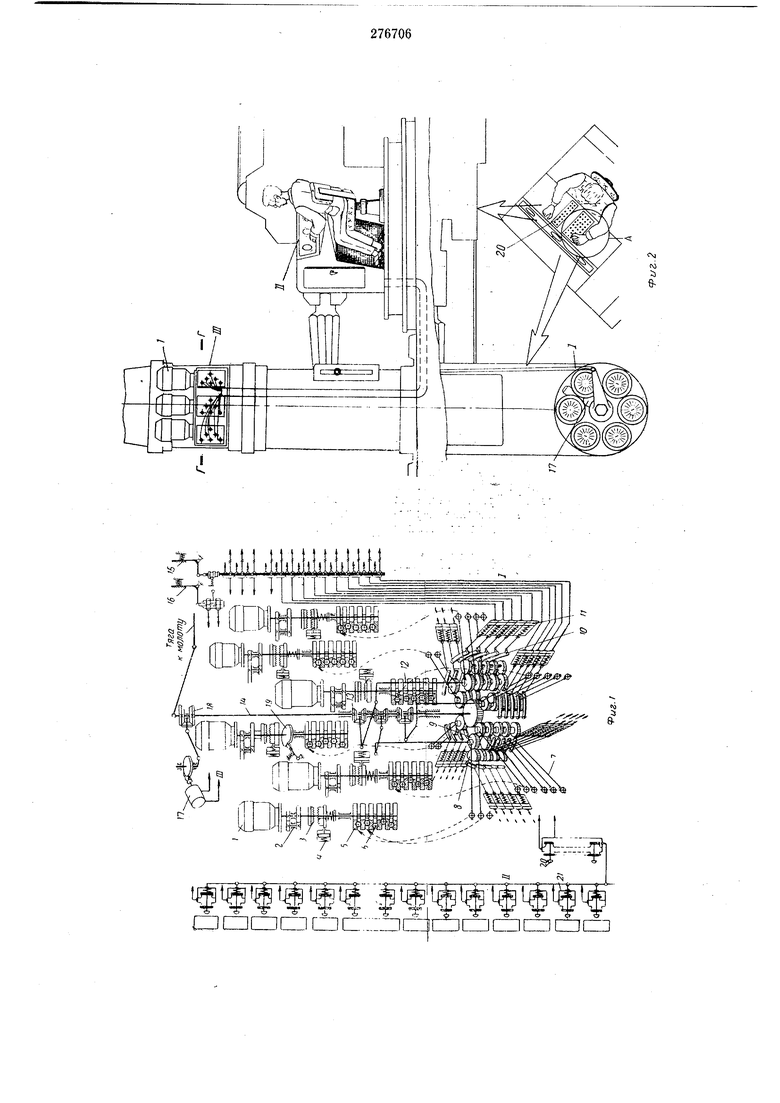
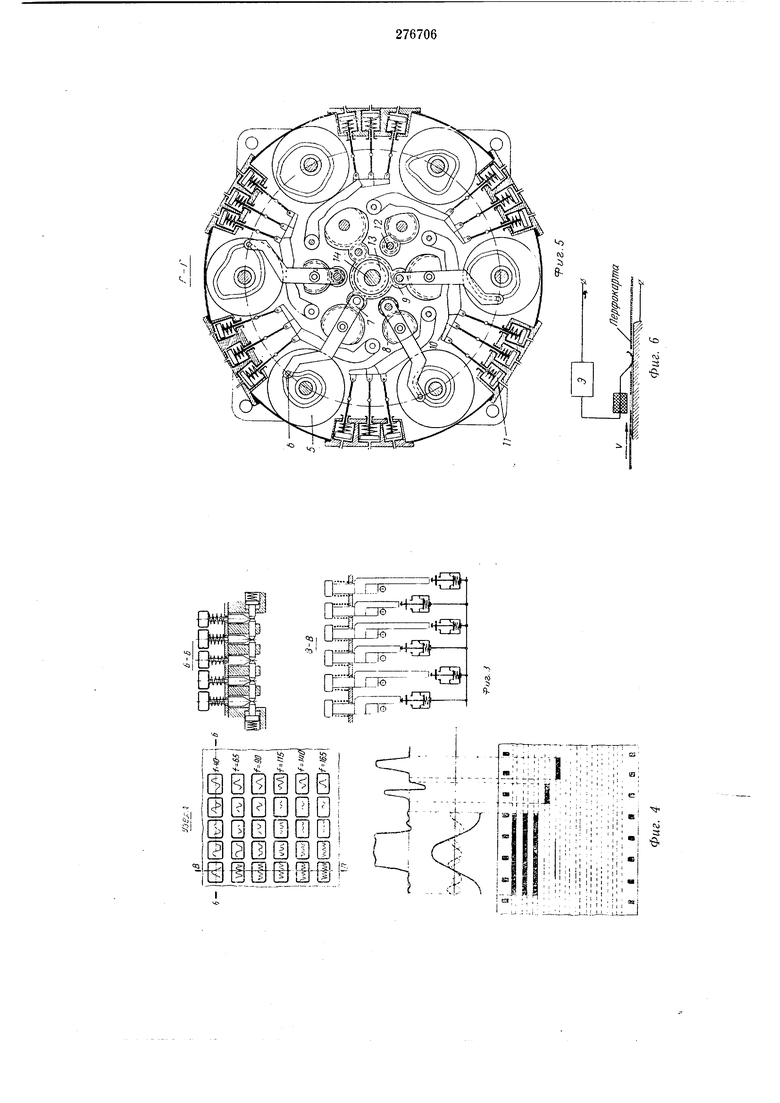
На фиг. 1 показана кинематическая схема описываемого устройства; на фиг. 2 - общий вид молота с устройством; на фиг. 3 - клавишное включение ударов молота (узел А) с
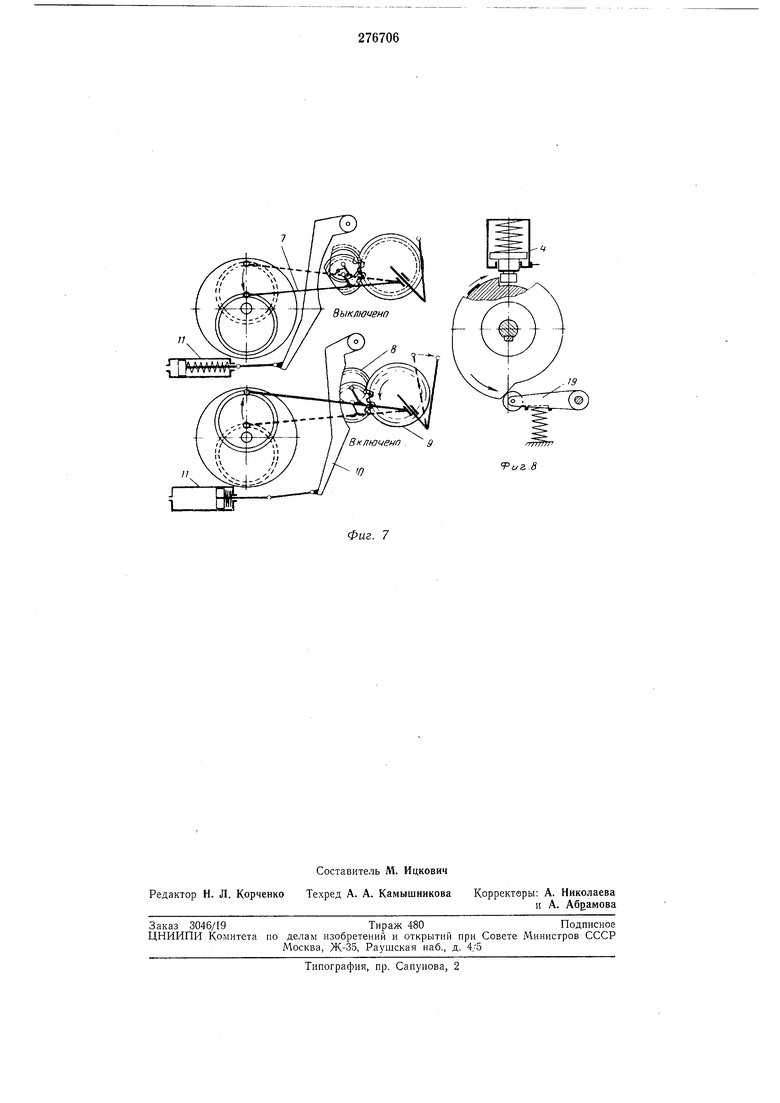
сечениями по Б-Б и В-В; на фиг. 4 - модулирование ходограмм золотника молота; на фиг. 5 - сечение по Г-Г на фиг. 2; на фиг. 6 - контактные лепестки программного пульта управления; на фиг. 7 - планетарный
механизм включения таймерного диска; на фиг. 8 - фиксатор исходного положения таймерных дисков.
Устройство состоит из трех узлов: механического модулятора / кодограммы движения
го пульта управления // и рычажной системы /// с пневмотурбинной коррекций.
Модулятор / включает приводные электродвигатели 1, связанные через редукторы 2 с верхними полумуфтами 3. Ведомые полулМуфты в исходном положении фиксируются пневмоцилиндром 4. На ведомом валу однооборотной муфты набраны пакетом таймерные диски 5 с записью исходных ходограмм золотника лмолота на их боковых поверхностях. Запись ходограмм выполнена канавкой, в которую введен шарик 6. Последний -имеет возможность перекатываться по канавкам между двумя таймерными дисками и передавать записанный закон движения через охватывающую обойму толкателям 7 планетарного механизма.
Планетарный механизм состоит из планетарной шестеренки-кулачка 8 И центральной шестерни 9. Кулачок планетарной шестеренки кинематически взаимодействует с отсчетяой планкой 10, соединенной через шатун с поршнем пневмоцилиндра 11.
Центральные шестеренки планетарных механизмов жестко насажены на валы 12 и связаны между собой при помощи рычажной передачи и сумхМирующих дифференциальных механизмов 13, имеющих общий выход на валу 14.
Пульт управления // содержит педальный переключатель 15 режима работы (программный, дистанционный) и педаль 16, соединенную через отсечной золотник и пневмопередачу с пневматической турбинкой 17. Последняя через червячный редуктор и дифференциальный механизм 18 необратимо связана с выходным валом механического модулятора и рычажным приводом золотника молота. Смещение линии качания золотника молота относительно оси симметрии впускных окон рабочего цилиндра определяет уменьшение длины рабочего хода золотника за счет увеличения холостого хода.
Исходное положение центральных шестеренок планетарных механизмов .фиксируется кулачком 19 с подпружиненным роликом. Пневмоклапаны 20 пульта управления соединены через переключатель режима работы полихлорвиниловыми трубками с цилиндрами включения планетарных механизмов (см. стрелки на фиг. ).
Электрическая схема включения электромагнитов пневмоклапанов 21 показана на фиг. 6.
Устройство работает следующим образом.
1Включаются приводные электродвигатели /. Крутящие моменты передаются через редукторы 2 однооборотных полумуфт 3, имеющих различные угловые скорости. Их ведомые валы с набором таймерных дисков 5 фиксируются в исходном положении пневмоцилиндром 4.
Подачей ппевматического импульса в пневмоцилиндр 4 включается однооборотная муфта, таймерные диски 5 совершают один оборот И, воздействуя на шарик 6, приводят в движение толкатели 7 планетарных механизмов, центральные шестерни 9 которых остаются неподвижными, а планетарные шестеренки обкатывают их под определенным углом вхолостую.
Педальным переключателем 15 задается прОграммный или дистанционный режимы управления, а педалью 16 подающие части
поднимаются и опускаются, и задается центр качания золотника при ударах. В процессе ковки этой педалью усиливается или ослабляется энергия отдельных ударов. Ослабление и усиление энергии ударов осуществляется делением -заданной ходограммы золотника молота на рабоч-ий и холостой участки (см. фиг. 7).
При подаче пневматического импульса в пневмоцилиндр 11 его поршень воздействует
на отсечную планку 10 и останавливает поворот планетарной шестеренки-кулачка 8, в результате чего толкатель 7 поворачивается вместе с шестерней 9. Вал 12 шестерни через дифференциальный механизм 13 передает
движение выходному валу 14, так как его сателлит застопорен фиксатором. Выходной вал 14 суммирует свое движение с пневмотурбинкой 17 и дифференциальным механизмом 18. Автоматические удары включаются
при подаче длительного импульса в рабочую полость пневмоцилиндра 4. Подача пневматических импульсов осуществляется через Пневмоклапаны 20 и 21. Включение двух планетарных механизмов, получающих привод с одной угловой скоростью, исключается роликовым фиксатором. Устройство работает с одновременным включением нескольких планетарных механизмов, приводимых с различными угловыми скоростями. Модуляция включенных ходограмм позволяет получать сложные ходограммы из нескольких пр остых (см. фиг. 4). Модулирование сложных ходограмм производится при помощи перфокарты |(см. фиг. 4 и 6) и вручНую одновременным нажатием нескольких кнопок на пульте управления (см. фиг. 3).
Описываемое устройство обеспечивает возможность гибкого изменения энергетического режима ковки, подготовки и воспроизведения
программы, внесения дистанционной корректировки и управления, исключения аварийных ситуаций.
Дистанционно-программное управление молотом производится следующим образом.
А. Подготовка программы управ л е и и я.
Оператор вместо таймерных дисков устанавливает их заголовки, а вместо стального
шарика 6 вставляет пенопластовый, пропитайный краской. Подачей сжатого воздуха в пневмоцилиндр 11 включается требуемый планетарный механизм. Приглащается опытный мащинист, освоивший ковку данной детали. Оператор выжидает момент и включает
сения ответственных ударов {рубки, вырубки, рихтовки, шлихтовки и т. д.). После записи всех дисков на всех радиальных валах они снимаются, а по вычерченным краской кривым фрезой выполняется канавка под шарик. После установки дисков и шариков на вал однооборотных муфт записанные удары могут быть повторены с усилением или ослаблением педалью 16.
Закон движения золотника молота с увеличением энергии удара изменяется от синусоидального до трапецеобразного. Переходные формы ходограмм задаются модулированием синусоидальных. Выбор исходных ходограмм, записанных на таймерные диски, производится по изображению их на клавиатуре пульта, а модулированных - по прилагаеMoli к пульту схеме. Модуляция ходограмм осуществляется известными методами гармонического анализа.
Б. Программное управление.
Оно осуществляется перемещением перфокарты. Корректировка энергии отдельных ударов производится педалью 16. При ее нажатии энергия ударов усиливается, а при освобождении - ослабляется.
Отмена отдельных запрограммированных ударов осуществляется нажатием педального переключателя 15. Включение дополнительных ударов осуществляется также при его нажатии с нажимом одной или нескольких кнопок пневмоклапанов 20. При нажатии на ледальный переключатель движение перфокарты останавливается благодаря ее связи с конечным включателем.
В. Дистанционное управление.
Оно сводится к нажатию педального переключателя 15, выбору ходограммы золотника молота и нажатию одной или нескольких кнопок. Усилие или ослабление отдельных ударов осуществляется нажатием педали 16, в результате чего заданная ходограмма будет разделена на рабочую и холостую ветви.
При обучении оператора необходимо запомнить, что с переходом от синусоидальных ходограмм к трапецеобразным, а также с увеличением длины хода и скорости перемещения золотника молота энергия ударов возрастает, а с увеличением частоты - уменьшается, iSn
В случае возникновения аварийной ситуации или технологической потребности в отмене удара в любой его фазе он отменяется путем нажатия педального переключателя при управлении молотом перфокартой (программное управление) и освобождения клавиши при дистанционном (ручном) управлении.
10
Предмет изобретения
1. Устройство дистанционно-программного управления паровоздушными молотами, содержащее пульт управления, управляющий
золотник, электропривод с командоаппаратом, на валу которого закреплены кулачки - таймерные диски, а также механизм перемещения толкателя по кулачкам командоаппарата и пневмогидравлический сервопривод, отличающееся тем, что, с целью обеспечения возмол ности дистанционной корректировки запрограммированного энергетического режима свободной ковки или горячей штамповки оператором при изменении температурных или пластических свойств поковки, а также обеспечения автоматической записи ходограмм движения управляющего золотника молота, оно снабжено установленной на валу командоаппарата пневмотурбинкой дистанционной корректировки, кинематически связанной с управляющим золотником молота, соединенным посредством кулачков и толкателя планетарного механизма, установленного в корпусе, с таймерными дисками командоаппарата, при этом
вал с таймерными дисками соединен с приводным электродвигателем посредством редуктора, обеспечивающего заданную программой скорость.его вращения.
2. Устройство но п. 1, отличающееся тем, что, с целью придания устройству большей компактности и увеличения объема программы, валы с таймерными дисками командоаппарата расположены по окрул ;ности планетарного механизма и кинематически соединены с кулачками планетарного механизма, взаимодействующими посредством планки, установленной в корпусе планетарного механизма, с пневматическими цилиндрами пульта управления паровоздушным молотом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для | 1969 |
|
SU258008A1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| Устройство программного управления паровоздушными молотами | 1960 |
|
SU133737A1 |
| Устройство для управления пневматическим молотом | 1980 |
|
SU1007811A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ УДАРА ПАДАЮЩИХ ЧАСТЕЙ МОЛОТА | 1972 |
|
SU332382A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| Защитное устройство к прессу | 1983 |
|
SU1119860A2 |
| АВТОМАТ ДЛЯ КЛЕЙМЕНИЯ И РАЗМЕТКИ ДЕТАЛЕЙ | 1967 |
|
SU216469A1 |
.- „„lUililil bMiuyiliy
фШШЩТф
CJ а CD czi cj сг;::::: с
tvi :5 3
ft
cu
a e
Риг 8
Фиг. 7
