(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ РАСКАТКИ КОЛЕЦ | 1972 |
|
SU419291A1 |
| РУКА МЕХАНИЧЕСКАЯВ П Т БЙП .-':••-V. ^-;:^ Н о .-•' , -•-й(ц, -.••'..•,;:,.; | 1972 |
|
SU425714A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор для радиально-ковочных машин | 1974 |
|
SU554056A1 |
| Устройство для поворота поковок при их осадке | 1980 |
|
SU1085664A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Ковочный безрельсовый манипуля-TOP | 1978 |
|
SU795707A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
t
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов машиностроительных предприятий, а именно к конструкциям манипуляторов, используемых при свободной ковке заготовок.
Известен манипулятор, содержащий подвижную тележку, установленную на ней с возможностью вертикального перемещения раму с клещевым захватом и механизм пс ворота рычагов клещевого захвата 1.
Недостатком этого манипулятора является невысокая его производительность при проведении таких операций, как прощйвка и раскатка, так как эти операции требуют установки под заготовку и на нее рабочего инструмента: подкладного кольца, прощивки или раскатки, подаваемых дополнительными манипулирующими устройствами. Цель изобретения - повышение производительности при проведении операций прошивки и раскатки поковок.
Указанная цель достигается тем, что манипулятор, содержащий подвижную тележку, установленную на ней с возможностью вертикального перемещения раму с клещевым захватом и механизм поворота рычагов клещевого захвата, снабжен двумя рычажными системами, расположенными симметрично относительно рамы и связанными с ней посредством установленных на ее направляющих подвижных ползушек с механизмом синхронного их перемещения в раз5 ных.направлениях, двумя парами силовых цилиндров со смонтированными на их щтоках инструментодержателями, одна пара из которых установлена на нижней рычажной системе, а другая - на верхней рычажной системе, при этом ее инструментодержатель выполнен двухпозиционным поворотным, а также поворотными упорами с индивидуальным механизмом поворота, смонтированными на рычагах клещевого захвата, при этом рама снабжена механизмом вертикально15 го перемещения.
Механизмы синхронного перемещения ползушек и поворота упоров выполнены в виде приводных зубчато-реечных соединений.
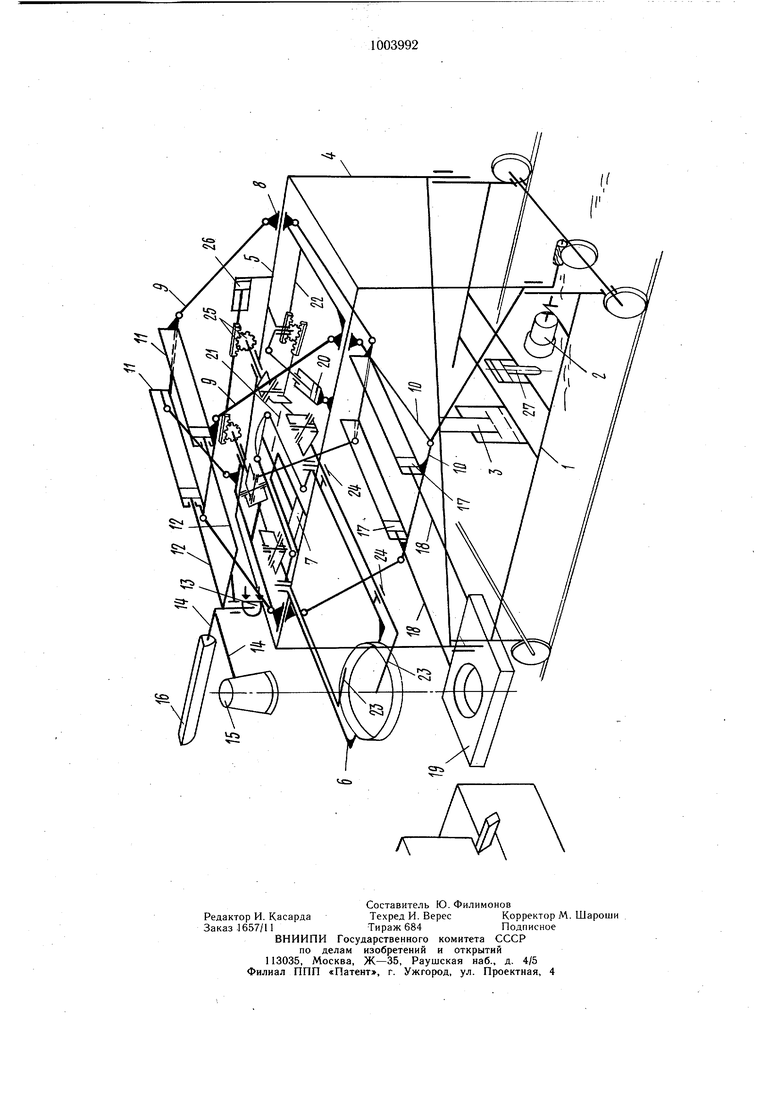
На чертеже изображена кинематическая
20 схема манипулятора.
Манипулятор содержит подвижную по рельсам тележку 1 с приводом 2. На тележке 1 установлена с возможностью вертикаль, ного перемещения цилиндром 3 рама 4 с направляющими 5. На раме 4 установлены рычаги 6 клещевого захвата, связанные с механизмом 7 поворота. На ползущках 8, установленных на направляющих 5, смонтированы симметрично относительно рамы рычажные системы 9 и 10. На рычажной системе 9 смонтированы силовые цилиндры 11, на щтоках 12 которых смонтирован поворотный гидромотор 13 с инструментодержателем 14 для установки прощивня 15 и раскатки 16. На рычажной системе 10 смонтированы силовые цилиндры 17, на щтоках 18 которых установлен держатель подкладного кольца 19. Механизм перемещения ползущек 8 выполнен в виде силового цилиндра 20, связанного посредством зубчатого колеса с зубчатыми рейками 21 и 22. Поворотные упоры 23 смонтированы на рычагах 6 клещевого захвата посредством подщипников 24 и связаны карданными валами и зубчато-реечными соединениями 25 с силовым цилиндром 26. Тележка 1 снабжена механизмом 27 стопорения. Манипулятор работает следующим образом. В рабочее положение устанавливается требуемый инструмент - раскатка 16 или прошивень 15 поворотом держателя 14 при помощи приводного тидромотора 13. Перенос верхнего инструмента в рабочую зону осуществляется подачей энергоносителя в рабочие полости цилиндров 11. Наложение верхнего инструмента на поковку осуществляется рычажной системой 9 при перемещении по направляющим 5 ползущек 8. Поворотные упоры 23 фиксируются в исходном положении цилиндром 26. Подкладное кольцо 19 при этом удерживается в правом крайнем положении штоками спаренных цилиндров 17 и не мешает процессу раскатки диска. Подъем и опускание раскатки осуществляется цилиндром 3, смонтированньш на рельсовой тележке 1. При выполнении операций прошивки на ось поковки, захваченной клещевыми захватами на нижнем бойке молота и отведенной в сторону от бойка, подводится сверху прощивень, а снизу подкладное кольцо перемещением ползущек приводным цилиндром. Затем включается цилиндр 3 подъема и механизм перемещения тележки 1 и подкладной и накладной инструмент с поковкой между ними устанавливаются на нижний боек молота. Молот включается на удары требуемой энергии для прошивки поковки. Съем прощивня и уборка подкладного кольца после прошивки выполняются в обратном порядке. Операция обкатки (диска, щайбы, кольца, фланца) поковки начинается с захвата поковки клещевыми захватами (конусными отростками) по диаметру поковки, клещи поднимаются вместе с рамой на высоту немного большую радиуса поковки. Включением механизма поворота флажков во вращение в разных направлениях поковка поворачивается и фиксируется в вертикальной плоскости. После выполнения указанных кузнечных операций манипулятор отводится по рельсовому пути с молота, для чего выключается стопор 27 и затем включается привод 2 передвижения рельсовой тележки 1. По сравнению с известным использование предлагаемого манипулятора позволяет повысить производительность работы при проведении кузнечных операций прошивки .и раскатки поковок. Формула изобретения 1.Манипулятор, содержащий подвижную тележку, установленную на {1ей с возможностью вертикального перемещения раму с клещевым захватом и механизм поворота рычагов клещевого захвата, отличающийся тем, что, с целью повышения производительности при проведении операций прошивки и раскатки поковок, он снабжен двумя рычажными системами, расположенными симметрично относительно рамы и связанными с ней посредством установленных на ее направляющих подвижных ползущек с механизмом синхронного их перемещения в разных направлениях, двумя парами силовых цилиндров со смонтированными на их штоках инструментодержателями, одна пара из которых установлена на нижней рычажной системе, а другая - на верхней рычажной системе, при этом ее инструментодержатель выполнен двухпозиционным поворотным, а также поворотными упорами с индивидуальным механизмом поворота, смонтированными на рычагах клещевого захвата. 2.Манипулятор по п. 1, отличающийся тем, что механизмы синхронного перемещения ползушек и поворота упоров выполнены в виде приводных зубчато-реечных соединений. Источники информации, принятые во внимание при экспертизе 1. Справочник «Ковка и объемная штамповка стали. Под ред. Сторожева М. В., М., «Машиностроение, 1967, т. Г, с. 217 (прототип).
