I
Изобретение относится к радиопеленгации ь УКВ - ДЦВ диапазонах, в частности к радиокомпасам предназначенным для при. вода средств поиска и спасения аа аварийные радиомаяки членов экипажей самолетов (кораблей), потерпевших аварию (кораблекрушение ).
Известен УКВ - ДЦВ автоматический pa iOKOhAnac, который содержит двухканальный приемник с блоком автоподстройки час- тоты (АПЧ) общего гетеродина.
Один канал - опорный, работает от направленной антенны и управляет блоком АПЧ Второй каноп - пеленгационный, работает по схеме обычного радиокомпаса со следящим приводом. При этом второй канал, полезный сигнал которого нтске уровня шумов, подстраивается блоком АПЧ от более сильного сигнала с опорного канала.
Однако известный радиокомпас работает 1 хшько от непрерывных сигналов.
Тем не менее, в ряде случаев возникает необходимость пеленгации сигналов импульсных экономичных маяков, работающих с болшой скважностью.
Целью изобрютения является обеспечение работы радиокомпаса по импульсным сигналам и реализация чувствительности, близ- кой к потенциальной.
.Цдя этого между выходом приемника комiiacHoro канала и входом управляющего усилителя включен элемент совпадения, второй вход которого подключен к выходу блока для формирования стробирующих импульсов опорного канала.
Изобретение пояснено чертежами.
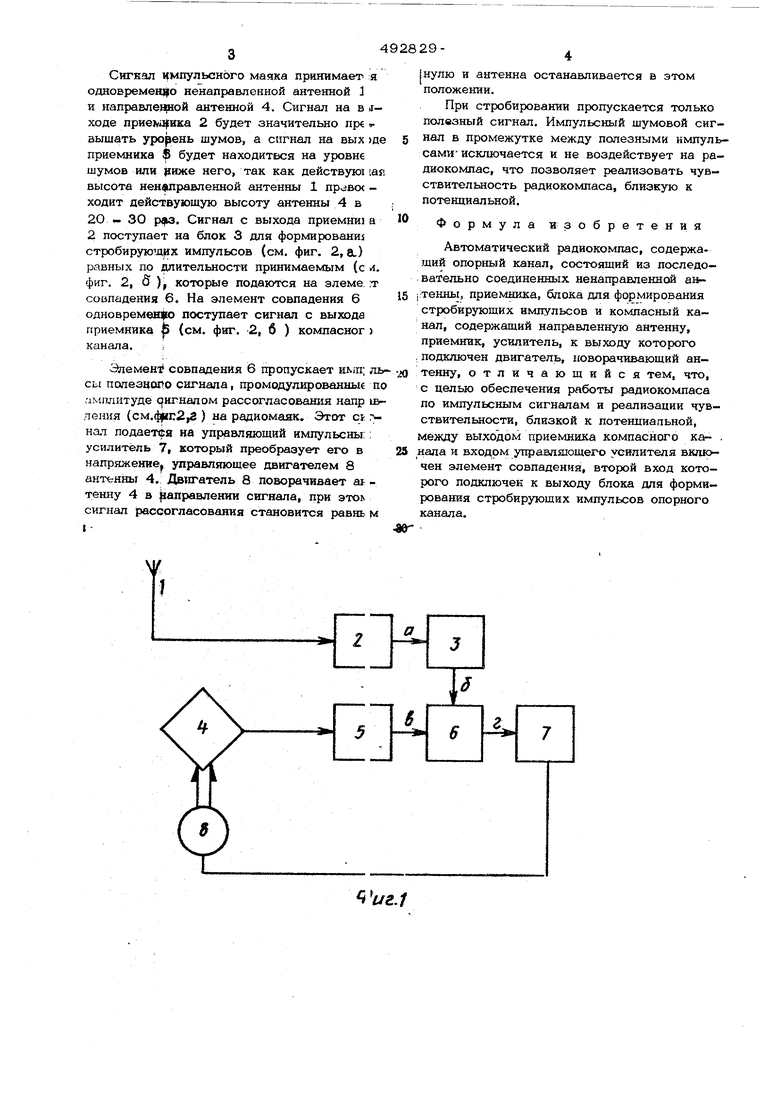
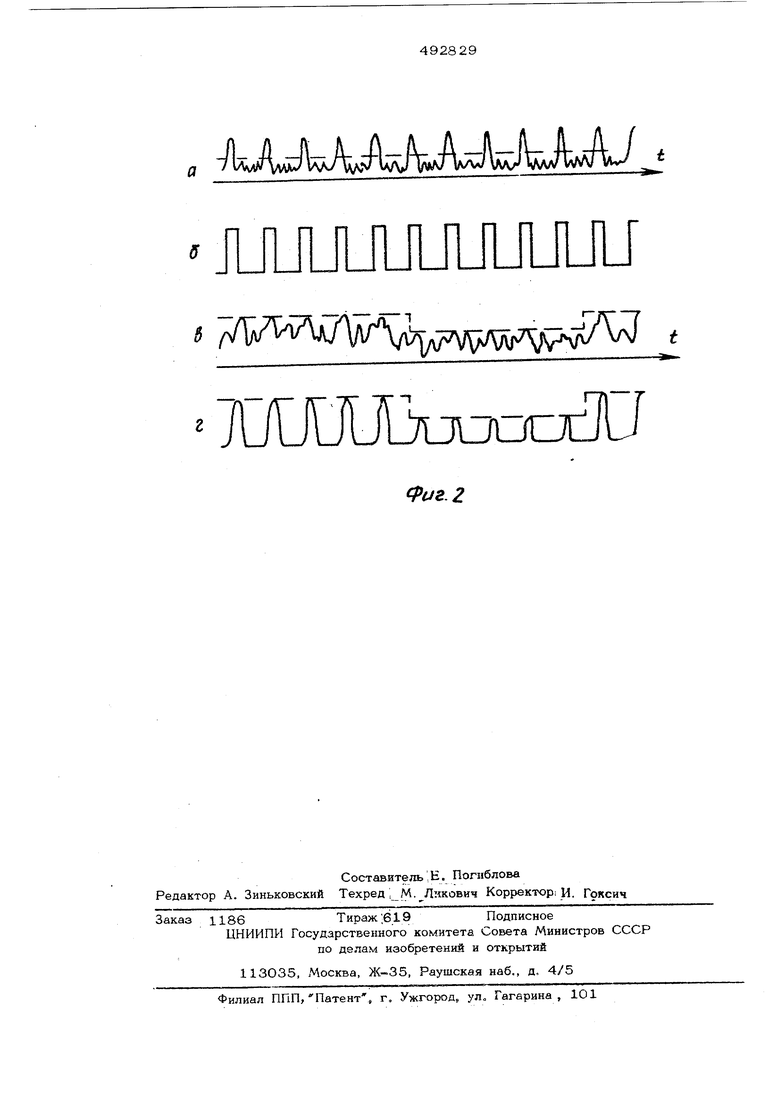
На фиг. 1 приведена структурная электрическая сэсема радиокомпаса: на фиг. 2 - врюменные диаграммы.
Автоматический радиокомпас содержит ненаправленную антенну 1, приемник 2, блок 3 для формирования стробируюших импульсов и компасный канал, состоящий из направленной антенны 4, приемника 5, элемента совпадения 6, импульсного управляющего усилителя 7, двигателя 8, поворачивающего антенну 4.
Радиокомпас работает следующим обра- .зом. Сигкал импульсного маяка принимает я одновременно ненаправленной антенной 1 и направлен|ной антенной 4. Сигнал на в jходе приек11(нка 2 будет значительно прс аышать урорень шумов, а сигнал на вых де приемника $ будет находиться на уровне шумов или иже него, так как действую lar высота ненаправленной антенны 1 прово ходит действующую высоту антенны 4 в 20 - ЗО р. Сигнал с выхода приемшн а 2 поступает на блок 3 для формировани5 стробируюдрх импульсов (см. фиг. 2,0.) равных по длительности принимаемым (с л. фиг, 2, )f которые подаются на элеме: :т совпадения 6. На элемент совпадения 6 одновремен ю поступает сигнал с выхода приемника (см. фиг. 2, б ) компасног ) канала. ; Элемент совпадения 6 пропускает иып; ль Сы полезаойо сигнала, промодулированны€ п амгшитуде с нгналом рассогласования напр 1Ь ления (см.,г ) на радиомаяк. Этот ci г кат подается на управляющий импульсны:: усилитель 7, который преобразует его в напряжение, управляющее двигателем 8 антенны 4. Двигатель 8 поворачивает ai тенну 4 в Направлении сигнала, при этo сигнал рассогласования становится равнь NI нулю и антенна останавливается в этом положении. При стробировании пропускается только полезный сигнал. Импульсный шумовой сигнал в промежутке между полезными импульсамиисключается и не воздействует на радиокомпас, что позволяет реализовать чувствительность радиокомпаса, близкую к потенциальной. Формула изобретения Автоматический радиокомпас, содержащий опорный канал, состоящий из последовательно соединенных ненаправленной анTeHHbi, приемника, блока для формирования стрюбируюших импульсов и компасный канал, содержащий направленную антенну, приемник, усилитель, к выходу которого подключен двигатель, поворачивающий антенну, отличающийся тем, что, с целью обеспечения работы радиокомпаса по импульсным сигналам и реализации чувствительности, близкой к потенциальной, между выходом приемника компасного ка- . нала и входом управляющего усилителя включен элемент совпадения, второй вход которого подключен к выходу блока для формирования стробирующих импульсов опорного канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Система измерения азимута летательного аппарата относительно радиомаяка | 1984 |
|
SU1181398A1 |
| Антенное устройство самолетного автоматического радиокомпаса | 1970 |
|
SU392866A1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ РАДИОРЕЛЕЙНОЙ СВЯЗИ | 2018 |
|
RU2689771C1 |
| СПОСОБ РАДИОНАВИГАЦИИ И РЕГИОНАЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2164694C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2363009C1 |
| ОБЗОРНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1840941A1 |
| РАДИОПЕЛЕНГАТОР | 2013 |
|
RU2588595C2 |
ТШиШиаоо /
у
fpuB.Z ,у 1 ;ЛдгЛуК ,
