1
Изобретение относится к трубогибочному производству, в частности к .оборудованию для гибки труб.
Известны системы автоматического управления трубогибочными машинами, содержащие установленные на приводном барабане регулируемые переключатели, взаимодействующие на каждой позиции с путевыми выключателями, установленными на станине мащины, и переключатели выбора позиции операции гибки.
Целью изобретения является сокращение временн переналадки машины на различные параметры гибки.
Эта цель достигается тем, что система снабжена шаговым искателем, рабочее ноле которого соединено с каждым путевым включателем через двухпозиционные переключатели выбора рабочей позиции, которые в свою очередь соединены с полем возврата указанного шагового искателя.
Для изменения очередности срабатывания позиций гибки в ней установлены щтепсельные разъемы, соединяющие поля шагового искателя с переключателями выбора позиции операции гибки.
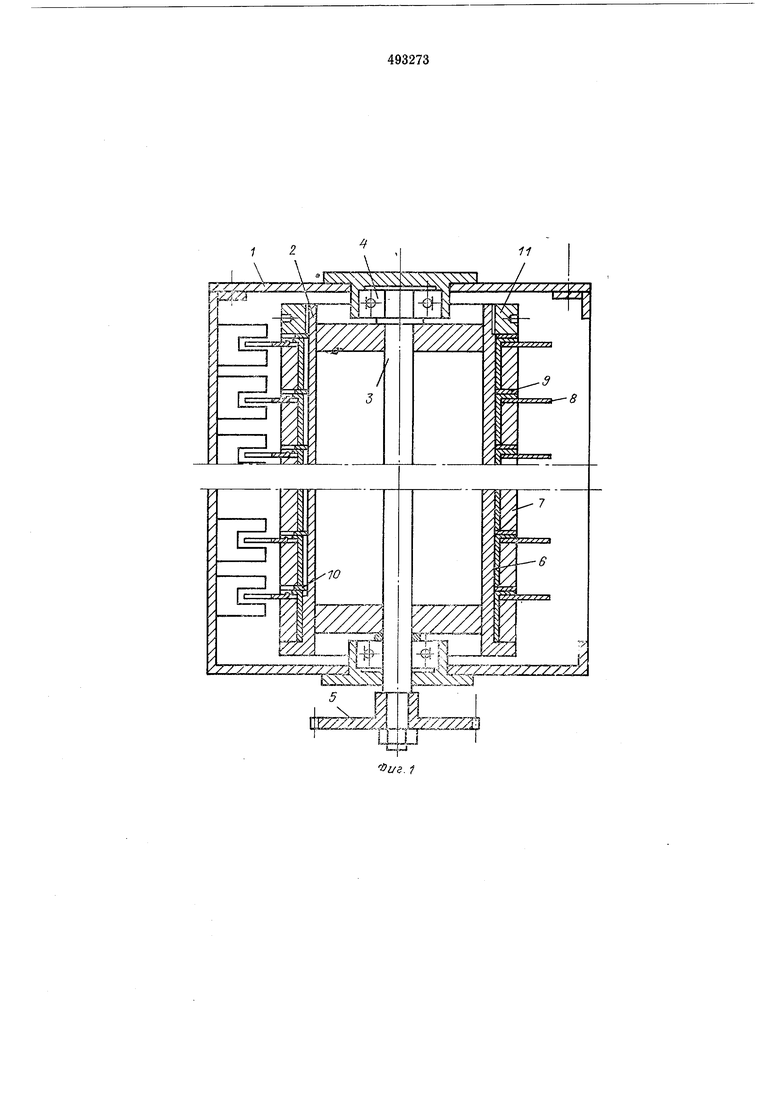
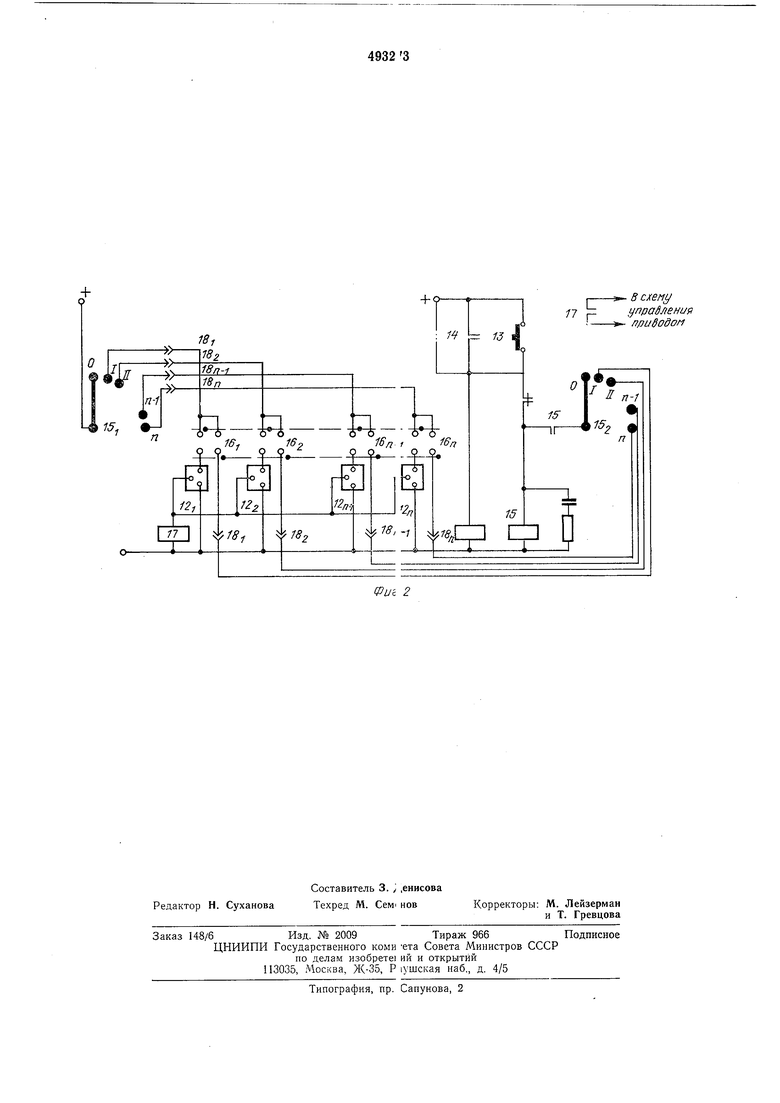
На фиг. 1 представлен командоаппарат трубогибочной машины; на фиг. 2 - электрическая схема управления машиной.
Командоаппарат работает совместно со схемой управления машиной.
Командоаппарат (фиг. 1) состоит из корпуса 1, барабана 2, закрепленного на валу 3 и
установленного в корпусе на подшипниках 4. На валу 3 установлена звездочка 5, которая при помощи цепи связывает барабан с валом гибочного сектора (не показан). На барабане установлено п командных секций, состоящих
из втулки 6, лимба 7, командного диска 8, разделительного диска 9 и указательного кольца 10, с которым при помощи отогнутого усика связан командный диск. Все секции на барабане стягиваются гайкой И.
На командном диске 8 каждой секции имеется вырез или выступ, при прохождении которого через щель бесконтактного путевого выключателя 12i-12и подается сигнал для прекращения вращения гибочного сектора.
Для задания требуемого угла гиба командные диски в процессе наладки устанавливают в положение, при котором включаются путевые выключатели и совмещают нулевые риски на лимбах 7 с рисками разделительных
дисков. Затем лимбы 7 фиксируют носредством винтов на втулках 6. Устройство работает следующим образом. При подаче кнопкой 13 или контактом реле 14 цикла импульса напряжепия на катушку шагового искателя 15 ротор последнего переходит с позиции О на позицию I.
Если для требуемого угла гиба используется установка позиции I, то переключатель 16 позиции замыкает цепь питания конечного выключателя 12i. В процессе гибки по достижении заданного угла гиба срабатывает путевой выключатель 12), через который напряжение поступает на катушку реле 17. Контактом реле 17 подается команда в схему унравления приводом трубогиба на прекращение рабочего хода. Другой контакт реле 17 дает команду на переход ротора на следующую позицию.
На позиции II контакт переключателя IGj замыкает цепь питания путевого выключателя 122. По достижении заданной координаты путевой переключатель 122 повторно активизирует реле 17, посредством которого шаговый искатель 15 переходит в положение следующей позиции.
В случае использования следующих позиций должны быть установлены в положение «Включено переключатели 1&2-16п.
Если по циклу не требуется использовать установленную на приборе координату, то необходимо отключить соответствующий переключатель этой позиции. В этом случае после отработки предыдущей координаты ротор щагового искателя 15 устанавливается в требуемое положение, и через контакт напряжение поступает на соответствующую панель второго поля шагового искателя 152, а затем через ротор и размыкающий контакт подводится к катушке шагового искателя 15. При этом ротор переходит до той позиции, на которой переключатель находится в положении «Включено.
Если используется только асть установленных координат, то шаговый искатель возвращается в положение О, и схема приходит в исходное положение.
Если по технологическому циклу необходимо очередность применения заранее установленных координат гибов, то переключением штепсельных переключателей ISi-18 выбирают любую требуемую последовательность работы путевых выключателей 12i-12.
Таким образом, ко.чмутируя переключатели НЛП заменяющие их контакты реле и штенсельные переключатели, осуществляют выбор требуемых координат из числа заданных заранее.
Предмет изобретения
1.Система автоматического управления трубогибочной мащиной, содержащая установленные на приводном барабане регулируемые переключатели, взаимодействуюнлие на каждой позиции с путевыми вы ключа гелями, установленными на станине машины, и переключатели выбора позиции операции гибки, отличающаяся тем, что, с целью сокращения времени переналадки машпны на различные параметры гибки, она снабжена щаговым искателем, рабочее поле которого соединено с каждым из упомянутых выключателей через двухпозиционные переключатели выбора рабочей позиции, а последние соединеиы с полем возврата щагового искателя.
2.Система по п. 1, отличающаяся тем, что, с целью изменения очередности срабатывания позиций гибки, в ней установлены лтепсельные разъемы, соединяющие поля шагового искателя с переключателями выбора позиции операции гибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБОЧНАЯ МАШИНА | 1971 |
|
SU415852A3 |
| Устройство для автоматического адресования грузов | 1972 |
|
SU477914A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| Устройство для автоматического поиска рецептурных табло | 1973 |
|
SU482774A1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
| Устройство для управления исполнительными механизмами | 1971 |
|
SU497560A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПРОГРАММНОГО | 1969 |
|
SU255431A1 |
| Способ моделирования для определения надежности систем массового обслуживания | 1962 |
|
SU151887A1 |
| ВЫЗЫВНАЯ СИГНАЛИЗАЦИЯ ПОДЪЕМНИКОВ | 1973 |
|
SU388990A1 |
| Адресователь грузового подъемника | 1972 |
|
SU479710A1 |