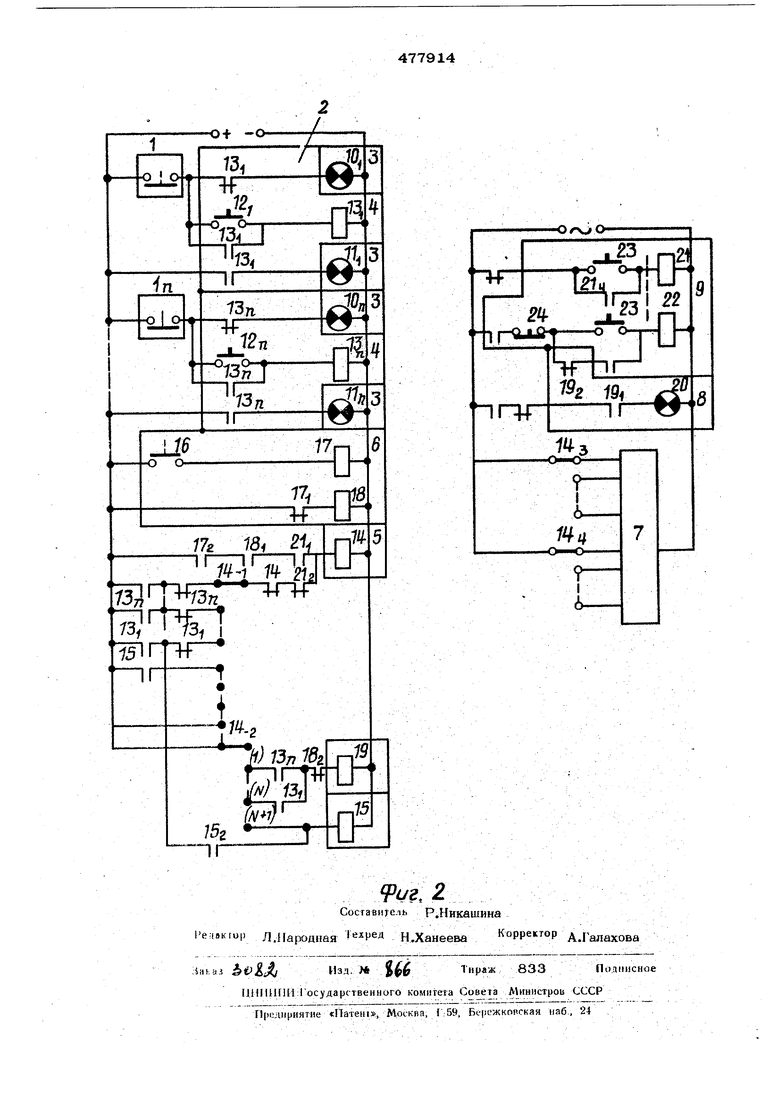
блока 9 управления приводом. Один из вх дов блока 8 сигнализации момента устано ки груза на конвейер присоединен к выход ячеек задания и запоминания адоеса, другой - к выходу счетчика 5, а выход блок 8 - ко входу блока 9 управления приводо Выход блока 9 управления приводом .че рез датчик 6 шага соединен со счетным входом счетчика 5, На чертеже датчики занятости 1 пред ставлены конечными выключателями 1 ... 1 Jt Ячейки сигнализации 3 реализованы на сигналы1ых лампах ячейки 4 задания и запоминания адреса 12i-12nна включаемых кнопками 12 -12 п реле . Счетчик 5 выполнен на щаговом искателе (катушка 14, поле искателя 14, 142 Датчик шага 6 реализован на конечном выключателе 16 и и 18. Конечный выключатель 16 перио/фчески нажима ется при прохождении конвейером расстоя ния в один шаг. Блок 8 момента установки груза на конвейер вьшолнан на реле 19 и сигнальной лампе 20. Блок 9 учрабления приводо конвейера представлен пускателем 21, 22 кнопками 23 и 24, Устройство работает следующим образом., При отсутствии грузов на некоторых рабочих местах от соответствующих конеч ных выключателей .... датчика 1 занятости этих рабочих мест включаются соответстующие сигнальные лампы 10 ячеек 3 сигнализации. Нажатием кнопок 12 ....12 „ 4 задания и запоминания адреса, соответствующих адресам выбранных оператором рабочих мест, к которым должны быть посланы грузы за один цикл работы конвейера, задается программа адресования. В начцпе нужно нажать на кнопку заДания адреса наиболее удаленного рабочеIX) места из числа выбранных оператором напримерN -го. При этом включится реле запоминания адреса соответствующей ячейки 4 задания и запоминания адреса и встанет на самоблокировку и лампа Ид ячейки 3 сигнализации посредством включения замыкающего контакта этого же реле . Через замыкающий контакт 13 , размыкающие контакты остальных реле запоминания адреса ячеек 4 задания и запоминания адреса и контакты поля шагового искателя командного счетчика 5 создается хепь самохода шагового искателя до пози- ции, начиная с которой число перемещений щеток шагового искателя будет равно чйЪлу шагов конвейера до наиболее удаленного рабочего места из числа выбранных оператором, например -го. Через контакты.полей 14 и 14 ша - -3.4 гового искателя на индикаторных лампах блока 7 индикации загорается число, указьтающее адрес заданного рабочего места. Убедившись в правильности набора первого адреса, в производной последовательности, следует нажать остальные кнопки ячеек 4 задания и запоминания адреса тех рабочих мест, к которым должны быть посланы грузы за один цикл работы. После установки на конвейер первого груза нажатием кнопки 23 блока 9 управления приводом подается команда на включение пускателя 22 привода конвейера. После е;аждого шага конвейера происходит нажатие конечного выключателя 16 датчика шага 6, что создает периодические импульсы на включение катушки щагового искателя и через замыкающие контакты входящих в датчик шага 6 реле 17 и 18 Переход щеток на следующую позицию происходит при отключении катушки контактом 18. Во время движения конвейера через контакт поля 14„, замыкающий контакт реле запоминания адреса в соответствующей ячейке 4 задания и запоминания адреса, для второго по удаленности адреса из числа заданных оператором включится реле 19 блока 8 сигнализации момента установки груза на конвейер. Замыкающий контакт 19.. реле 19 включит лампу 20 блока 8, а размыкающий контакт 19„ реле 19 отключит пускатель 22 привода конвейера. Это приведет к первой в цикле работы промежуточной остановке для установки ца конвейер второго адресуемого груза, нос, ле чего нужно снова включить привод конвейера кнопкой 23. Следующая промежуточная остановка конвейера обеспечивается контактом поля 14„ и замыкающим контактом реле зано минания адреса в соответствующей ячейке 4 задания и запоминания адреса длю треаь его по удаленности адреса. После установки на конвейер третьего -грузд нeoбxoдJ ч
снова включить привод конвейера кнопкой 23. Таким же образом следует произвести установку на конвейер остальных адресуемых в данном цикле грузов.
После установки на конвейер последнего адресуемого груза и нажатия кнопки 23 движение конвейера будет продолжаться до тех пор, пока первый поставленный на конвейер груз не пройдет расстояние до наиболее удаленного рабочего места из числа выбранных оператором, например
N -го. При этом щетки шагового искателя будут находиться на позиции ( N +1).
Через контакт поля 14, шаговго искателя на позиции ( N + 1) включится реле 15 командного счетчика, подавая команды на отключение пускателя 22 привода и возврат в исходное положение шагового искатзля.:
После установки всех адресуемых грузов на заданные рабочие места конечные выключатели 1 занятости этих рабочих ме9т отключают соответствующие реле запоминания адреса, и схема возвращается в исходное положение.
Цри аварийном или случайном отключении движущегося конвейера кнопкой 24 блока 9 управления; пр1шодом программа адресования сохраняется, так как реле 21
остается включенным до конца цикла работы конвейера.
Предмет изобретения
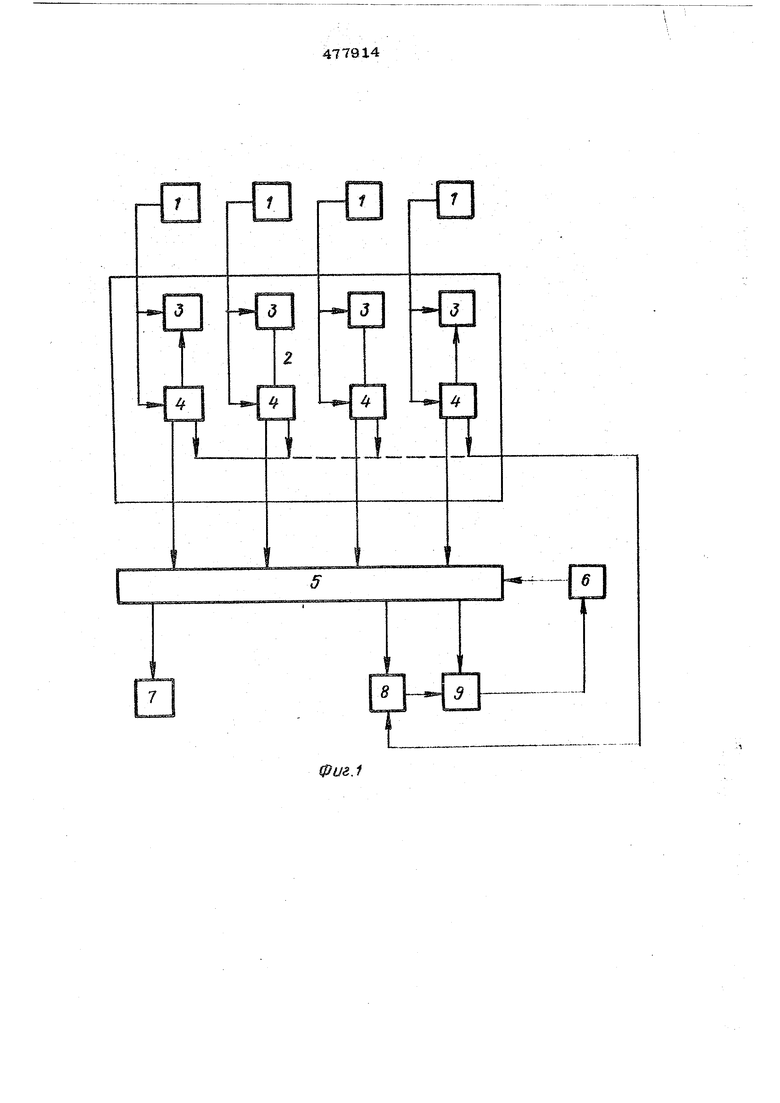
Устройство для ав томатического адресования грузов, напри1 ер, на конвейере, содержащее блок .задания программы, включающий в себя ячейки сигнализации и ячейки задания и запоминания адреса,
ВЫХОДЫ которых соединены со входами ячеек сигнализации и соответствующими входами , выходы которого соединены соответственно со входами блока индикации и блока управления приводом,
выход которого через датчик шага подключен к счетному входу счетчика, о тличающееся тем, что, с целью доставки партии грузов одновременно за один ход конвейера к соответствующим
рабочим местам, оно содержит датчика занятости рабочих мест, выходы которых соединены со входами ячеек задания и за поминания адреса и ячеек сигнализации, i и блок сигнализации момента установки
груза на конвейер, один из входов которого соединен с выходом и ячеек задания и запоминания адреса, а другчэй - с выхо дом счетчика, а выход соедин- н со входом блока управления приводом.
1
Фи1.1
Orv/O
j23,n
.
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Система полуавтоматического адресования длинномерных сортиментов | 1990 |
|
SU1808802A1 |
| Адресователь грузового подъемника | 1972 |
|
SU479710A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1475874A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ГРУЗОВ | 1971 |
|
SU293737A1 |
| АГРЕГАТ ДЛЯ ПОДАЧИ ТОВАРОВ В ПОДДОНАХ И ИМ ПОДОБНОЙ ТАРЕ ИЗ ПОДСОБНЫХ ПОМЕЩЕНИЙ В ТОРГОВЫЙ ЗАЛ | 1969 |
|
SU239848A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство сопровождения и адресования объектов на конвейере | 1990 |
|
SU1813687A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |