во 17 изменения скорости вращения дизе- nq, логический элемент И 18, датчик 19 скорости вращения дизеля, датчик 20 давления наддува, датчик 21 скорости движения судна, датчик 22 скорости вращения гребного винта, функциональный преобразователь
23скорости вращения дизеля в его газовый момент, функциональный преобразователь
24скорости вращения дизеля в момент от сил инерции его вращающихся частей, функциональный преобразователь 25 давления наддува в запас крутящего момента на валу дизеля, функциональный преобразователь 26 скорости судна в момент от действия гидродинамических сил (т.е. момент, который должен быть приложен к гребному винту для его вращения в противоположную сторону), функциональный преобразователь 27 скорости вращения гребного винта в момент от сил инерции валопровода, гребного винта и присоединенных к нему масс воды, сумматоры 28 и 29 и компаратор 30.
Дистанционный пост 1 управления служит для преобразования воздействия оператора в команды задания направления вращения ХВп, ХНэ и сигнал задания скорости вращения дизеля ХСк. Выходы дистанционного поста 1 управления соединены с входами логических элементов НЕТ 2 и 3 цепей Вперед - Назад, а также с переключателем 11 задания скорости.
Логические элементы НЕТ 2 и 3 цепей Вперед - Назад служат для блокирования команд Хвп и Хнз в случае наличия сигналов Снз и Свп о фактическом включении противоположного направления вращения. Выходы элементов 2 и 3 соединены с входами логического элемента ИЛИ 6, а также с входами исполнительного устройства 16 реверса.
Логические элементы НЕ 4 и 5 цепей выдержки в Нейтрали служат для блокирования сигналов Свп, Снз в случае наличия сигнала от логического элемента И 18. Логический элемент И 18 служит для суммиро- вания сигналов от инвертора 9 и компаратора 30. Выходы элементов 4 и 5 соединены с вторыми входами элементов НЕТ 2 и 3. Выход инвертора 9 соединен с вторым входом логического элемента И 18. Выход логического элемента И 18 соединен с вторыми входами логических элементов НЕТ 4 и 5 цепей выдержки в Нейтрали,
Выход логического элемента ИЛИ 6 соединен с входом инвертора 8. Выход инвертора 8 соединен с первым входом порогового реле 12 и с переключателем 11 задания скорости.
Задатчик 10 скорости служит для выработки постоянного по величине сигнала Рек
задания скорости вращения дизеля. Выход задатчика 10 скорости соединен с входом переключателя 11 задания скорости.
Переключатель 11 задания скорости
служит для переключения задания скорости вращения дизеля с сигнала Хек от дистанционного поста 1 управления на сигнал РСк от задатчика 10 скорости и обратно в зависимости от наличия на его входе сигналов от
логического элемента ИЛИ 7 и от инвертора 8. Выход переключателя задания 11 скорости соединен с входом исполнительного устройства 17 изменения скорости вращения дизеля, а также с входом порогового реле
12. Выход порогового реле 12 соединен с входом исполнительного устройства 16 реверса.
Датчик 15 реверса служит для выработки сигналов Свп и Снз о фактическом направлении вращения дизеля. Выходы датчика 15 реверса соединены с входами логического элемента ИЛИ 7, а также через элементы 13 и 14 задержки с запрещающими входами логических элементов НЕТ 2 иЗ цепей Вперед - Назад. Выход логического элемента ИЛИ 7 соединен с входом переключателя 11 задания скорости и входом инвертора 9.
Датчик 19 служит для выработки сигнала о скорости вращения дизеля. Выход
датчика 19 соединен с входом функционального преобразователя 23. Функциональный преобразователь 23 служит для преобразования сигнала о скорости вращения дизеля в сигнал о располагаемом дизелем газовом
моменте.
Функциональный преобразователь 24 служит для преобразования сигнала о скорости вращения дизеля в сигнал о моменте от сил инерции его вращающихся частей.
Выходы функциональных преобразователей 23 и 24 соединены с первым и вторым входом сумматора 28.
Датчик 20 служит для выработки сигнала о давлении наддува. Выход датчика 20
соединен с входом функционального преобразователя 25. Функциональный преобразователь 25 служит для преобразования сигнала о давлении наддува в сигнал о запасе крутящего момента дизеля. Выход функционального преобразователя 25 соединен с третьим входом сумматора 28.
Датчик 21 служит для выработки сигнала о скорости судна. Выход датчика 21 сое- динен с входом функционального преобразователя 26. Функциональный преобразователь 26 служит для преобразования сигнала о скорости судна в сигнал о моменте от действия на гребной винт гидродинамических сил. Выход функционального
преобразователя 26 соединен с первым входом сумматора 29.
Датчик 22 служит для выработки сигнала о скорости вращения гребного винта. Выход датчика 22 соединен с входом функционального преобразователя 27. Функциональный преобразователь 27 служит для преобразование сигнала о скорости вращения гребного винта в сигнал о моменте от действия сил инерции валопровода, гребного винта и присоединенных к нему масс воды. Выход функционального преобразователя 27 соединен с вторым входом сумматора 29.
Сумматоры 28 и 29 служат для суммирования сигналов от фуикцио эльных преоб-. разователей 23, 24. 25 и 26, 27. Выходы сумматоров 28 и 29 соединены с компаратором 30.
Компаратор 30 служит для сравнения сигналов, поступающих от сумматоров 28 и 29, и выработки дискретного сигнала в случае, если сигнал от сумматора 28 больше или равен сигналу от сумматора 29 (при необходимости в компараторе происходит приведение дискретного сигнала к тому виду и уровню, который необходим). Выход компаратора 30 соединен с первым входом логического элемента И 18.
Система работает следующим образом.
Для реверсирования с переднего хода оператор перемещает рукоятку (не показана) дистанционного поста 1 управления в положение заднего хода. С выхода дистанционного поста 1 управления исчезает команда Хвп и появляется ХНз. которая поступает в логический элемент НЕТ 3, но блокирована в нем сигналом СВп,поступающим через элемент 14 задержки и логический элемент НЕТ 5 от датчика 15 реверса. В результате на выходе элемента ИЛИ 6 нет сигнала, что приводит к появлению на выходе инвертора 8сигнала Уси о необходимости переключения реверсивной передачи в положение Нейтраль.
Сигнал Уот приводит переключатель 11 задания скорости в положение, когда к исполнительному устройству 17 изменения скорости вращения дизеля проходит постоянное задание скорости Рек от задатчика 10 скорости (). Одновременно сигнал Уо1 поступает к первому входу порогового реле 12 и включает его в работу.
Если в момент включения з работу порогового реле 12 уровень аналогового сигнала задания скоростного режима Уск, поступающего к его второму входу, уже станет равным постоянному заданию скорости Рек (), порогового реле 12 срабатывает, на его выходе появляется сигнал на переключение исполнительного устройства 16 реверса в положение Нейтраль.
Исполнительное устройство 16 реверса переключает реверсивную передачу (на 5 фиг.2 не показана) в положение Нейтраль. В результате сигнал Свп на выходе датчика 15 реверса исчезает. Одновременно с исчезновением сигнала на выходе датчика 15 реверса включается в работу элемент 14
0 задержки, который начинает отсчет времени паузы в положении Нейтраль. Элемент 14 задержки настраивается на определенное заранее установленное время задержки. До истечения этого времени будет
5 сохраняться сигнал на входе логического элемента НЕТ 5 и, соответственно, сигнал на его выходе, поступающий к запрещающему входу логического элемента НЕТ 3. Одновременно с исчезновением сигна0 ла на выходе датчика 15 исчезает сигнал на выходе логического элемента ИЛИ 7, соответственно, исчезает сигнал на выходе инвертора -9. На выходе инвертора 9 появляется сигнал и поступает на один из
5 входов логического элемента И 18.
Одновременно с этим сигналы, поступающие от датчиков 19-22, преобразовываются функциональными преобразователями 23-27, суммируются сумматорами 28 и 29.
0 Сигнал от сумматора 28 (пропорциональный располагаемому моменту) и сигнал от сумматора 29 (пропорциональный потребному моменту) поступают на вход компаратора 30. В случае равенства моментов или превы5 шения располагаемым моментом потребного на выходе компаратора 30 появляется сигнал (преобразованный к необходимому виду и уровню), который поступает к второму входу логического элемента И 18.
0На выходе логического элемента И 18
появляется сигнал, который поступает к запрещающему входу логического элемента НЕТ 5, после чего сигнал на выходе логического элемента НЕТ 5 исчезает, соответст5 венно, исчезает сигнал на запрещающем входе логического элемента НЕТ 3. Существовавший запрет на прохождение сигнала Хнз через логический элемент НЕТ 3 будет снят. Сигнал ХНэ через логический элемент
0 НЕТ 3 поступает на вход исполнительного устройства 16 реверса и переключает его в положение Назад. Пауза в положении Нейтраль прерывается до истечения времени, отсчитываемого устройством 14 за5 держки. Исполнительное устройство 16 реверса переключает реверсивную передачу в положение Назад.
После переключения реверсивной передачи в положение Назад на выходе датчика 15 реверса появляется сигнал Снэ,
который через логический элемент ИЛИ 7 поступает к переключателю 11, который переключает на свой выход сигнал ХСк от дистанционного поста 1 управления. На вход исполнительного устройства 17 поступает сигнал , происходит увеличение скорости вращения дизеля до заданной, Реверсирование выполнено.
Реверсирование с заднего хода на передний происходит в той же последовательности.
Формула изобретения Система управления главной судовой дизельной установкой при реверсировании, содержащая дистанционный пост управления, два логических элемента НЕТ цепей Вперед - Назад, два логических элемента НЕТ цепей выдержки в Нейтрали, первый и второй логические элементы ИЛИ, инвертор, задатчик скорости, переключатель задания скорости, пороговое реле, два элемента задержки, датчик реверса, исполнительное устройство реверса г исполнительное устройство изменения скорости вращения дизеля, причем выходы дистанционного поста управления соединены с входами двух логических элементов НЕТ цепей Вперед - Назад и с переключателем задания скорости, а выходы двух логических элементов НЕТ цепей Вперед - Назад соединены с входами первого логического элемента ИЛИ и с входами исполнительного устройства реверса,.при этом выходы двух логических эдементов НЕТ цепей выдержки в Нейтрали соединены с вторыми входами логических элементов НЕТ цепей Вперед - Назад, а выход первого логического элемента ИЛИ соединен с входом инвертора, выход которого соединен с пороговым реле и переключателем задания скорости, причем выход порогового реле соединен с входом исполнительного устройства реверса, а выходы элементов задержки соединены с вторыми входами логических элементов НЕТ цепей выдержки в Нейтрали, при этом выходы датчика реверса соединены с входами второго логического элемента ИЛИ
и элементами задержки, а выход второго логического элемента ИЛИ соединен с входом переключателя задания скорости, выход которого соединен с исполнительным
устройством изменения скорости вращения дизеля, отл ичаю щаясятем,что, с целью повышения безопасности плавания судна путем сокращения времени реверсирования установки, она снабжена датчиком частоты вращения дизеля, датчиком частоты вращения гребного винта, датчиком давления наддува, датчиком скорости судна, функциональным преобразователем сигнала о частоте вращения дизеля в сигнал, пропорциональный газовому моменту дизеля, функциональным преобразователем сигнала о частоте вращения дизеля в сигнал, пропорциональный моменту от сил инерции его вращающихся частей, функциональным
преобразователем сигнала о давлении наддува в сигнал, пропорциональный запасу крутящего момента на валу дизеля, функциональным преобразователем сигнала о скорости судна в сигнал, пропорциональный
моменту, который должен быть приложен к гребному винту для его вращения в противоположную сторону, функциональным преобразователем сигнала о частоте вращения гребного винта в сигнал, пропорциональный моменту от сил инерции валопровода, гребного винта и присоединенных к нему масс воды, двумя сумматорами, компаратором, вторым инвертором и логическим элементом И, причем выходы упомянутых
датчиков соединены с соответствующими функциональными преобразователями, выходы которых соединены с сумматорами, а выходы сумматоров соединены с входами компаратора, выход которого соединен с
вторым входом логического элемента И, при этом первый вход логического элемента И соединен с выходом второго инвертора, а выход соединен с запрещающими входами логических элементов НЕТ цепей выдержки
в Нейтрали, причем вход второго инвертора соединен с выходом второго логического элемента ИЛИ.
Hj
W 21 22
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| Система управления судовым нереверсивным дизелем и его реверсивной передачей | 1988 |
|
SU1504162A1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| Электропривод гребного винта | 1986 |
|
SU1399874A1 |
| Система автоматизированного управления судовым нереверсивным дизелем и его реверсивной передачей | 1986 |
|
SU1382794A1 |
| Судовая энергетическая установка | 1982 |
|
SU1024365A1 |
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| ПНЕВМАТИЧЕСКОЕ VCTPOfiCTBO ДЛЯ ДИСТАНЦИОННОГО | 1969 |
|
SU236898A1 |
| Устройство для испытания гребной энергетической установки судна | 1990 |
|
SU1699858A1 |
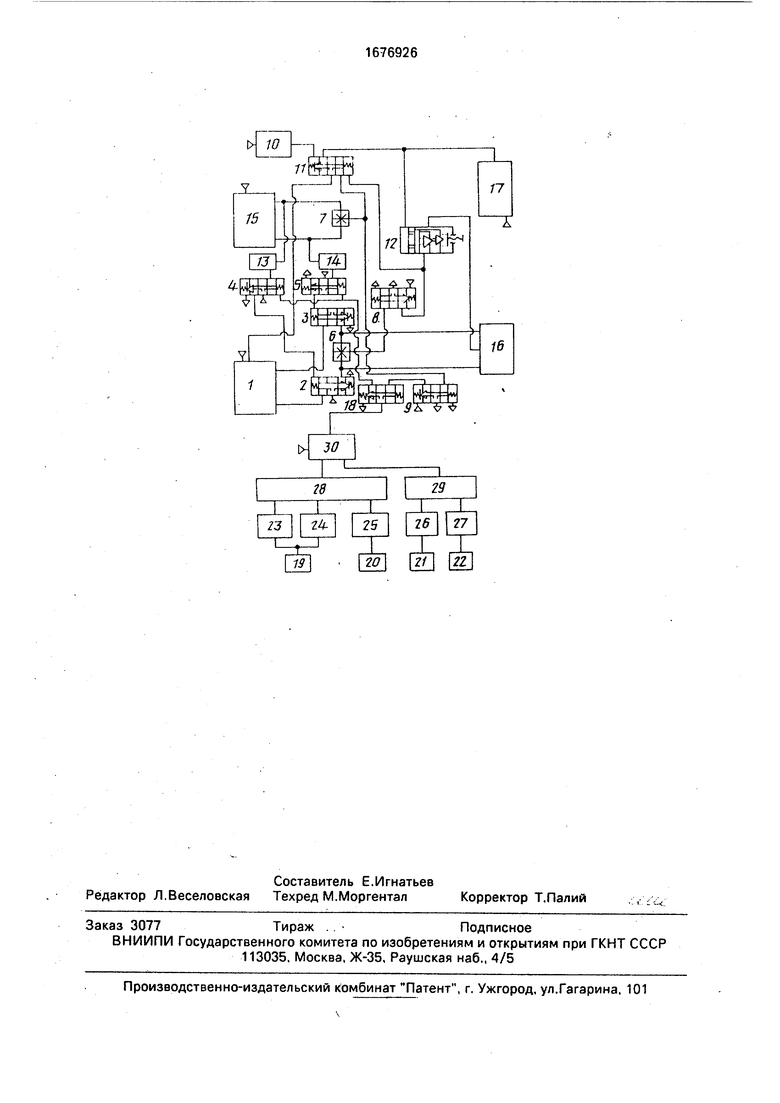
Изобретение относится к судостроению, в частности к системам управления главными судовыми дизельными установками при реверсировании. Цель изобретения - повышение безопасности плавания судна путем сокращения времени реверсирования установки. Система управления содержит пост управления 1, исполнительное устройство 16 реверса и цепи управления его положениями Вперед, Нейтраль и Назад с логическими элементами, датчик 19 скорости вращения дизеля, датчик 20 давления наддува, датчик 21 скорости движения судна, датчик 22 скорости вращения Изобретение относится к судостроению, в частности к системам управления главными судовыми дизельными установками при реверсировании. Цель изобретения - повышение безопасности плавания судна путем сокращения времени реверсирования установки. На чертеже схематично изображена система управления главной судовой дизельной установкой при реверсировании. гребного винта, функциональный преобразователь 23 скорости вращения дизеля в газовый момент, функциональный преобразователь 24 скорости вращения дизеля в момент сил инерции его вращающихся частей, функциональный преобразователь 25 давления наддува в запас крутящего момента на валу дизеля, функциональный преобразователь 26 скорости судна в момент от действия гидродинамических сил, функциональный преобразователь 27 скорости вращения гребного винта в момент от сил инерции валопровода, гребного винта и присоединенных к нему масс воды, сумматоры 28, 29 и компаратор 30. Сигналы, поступающие от датчиков 19, 20, 21, 22, преобразовываются функциональными преобразователями 23, 24, 25, 26, 27, суммируются сумматорами 28, 29. Сигнал от сумматора 28, пропорциональный располагаемому моменту, и сигнал от сумматора 29, пропорциональный потребному моменту, поступают на вход компаратора 30. После равенства моментов сигнал по соответствующим цепям поступает на исполнительное устройство 16, которое переключает реверсивную передачу. 1 ил. Система содержит дистанционный пост 1 управления,логические элементы НЕТ 2 и 3 цепей Вперед - Назад, логические элементы НЕТ 4 и 5 цепей выдержки в Нейтрали, логические элементы ИЛИ 6 и 7, инверторы 8 и 9, задатчик 10 скорости, переключатель 11 задания скорости, пороговое реле 12, элементы 13 и 14 задержки, датчик 15 реверса, исполнительное устройство 16 реверса, исполнительное устройст г Ё Os VJ О о ю о
| Система дистанционного управления главной судовой дизельной установкой | 1982 |
|
SU1063709A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
