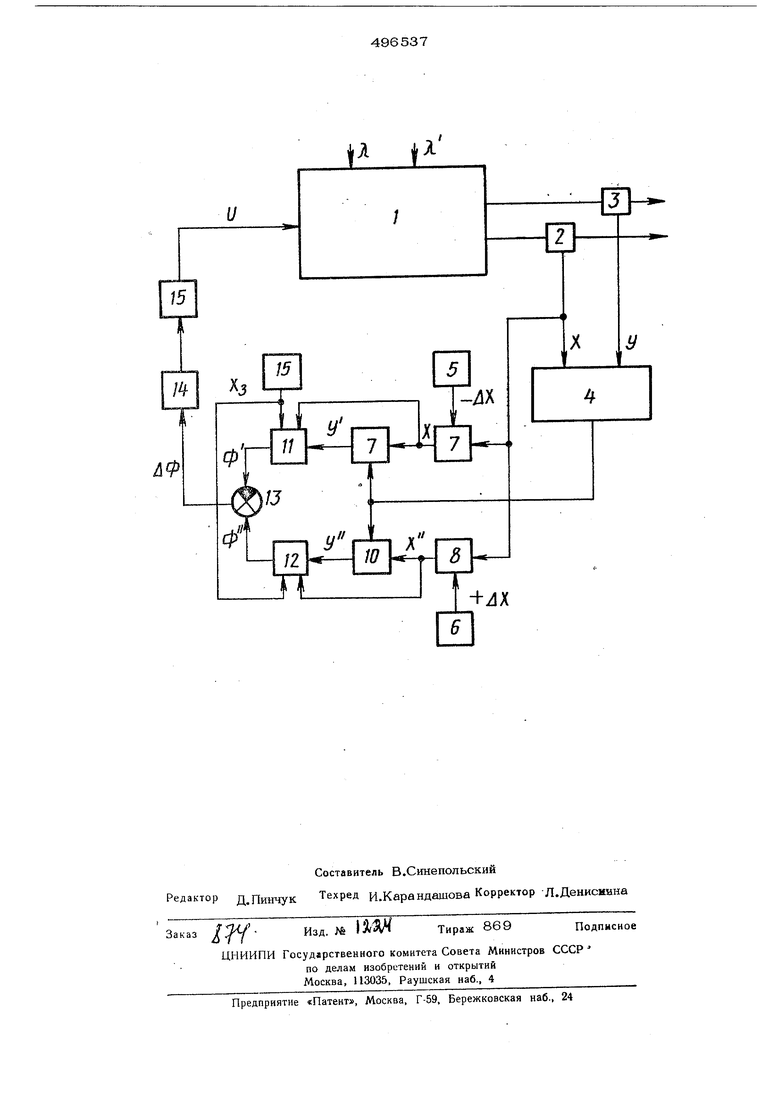
где OB - количество готового продукта; - производительность процесса по готовому продукту. Зависимость (I) является унимодальной экстремальной функцией; экстремуммаксимум которой .произвольно дрейфует под влиянием возмущающих воздействий Я (вызывающих вертикальный дрейф) и Я (в зывающих горизонтальный дрейф). Величи- ны- зе и у- являются линейными функциями (противоположного знака) управляющего воздействия Ч , а между собой свя заны коэффициентом К , который измен ется произвольным образом в зависимости от изменения характеристике исходного Задачей системы является поиск и поддержание (без ввода пробных воздействий, на объект) таких значений ОС и , пр которых обеспечивается экстремум-максим функции цели (1) при наличии в каждый мо мент времени значений у,Л , и К , Система работает следующим образом. Сигналы с датчика качества продукта 2 и датчика производительности процесса по этому продукту 3 поступают в блок коррекции 4, где производится вычисление усредненного текущего значения К. Блоки 5 и 6 являются источниками сиг налов смещения - А х и + Д ае соответственно, значения которых устанавливбшэтся при наладке системы и в процессе работы остаются постоянными. В сумматоре 7 из текущего значения сигнала СС вычитается сигнал смещения Л JC , а в сумматор 8 сигнал смещения д эе суммируется с текущим значением сигнала х Таким образом, на выходе сумматора 7 получается сигнал ас оз-лх а на выходе сумматора 8 сигнал В блоках 9 и Ю восстанавливаются значения У и V , соответствующие значениям сигналов X и Х. В это соответс вие они непрерывно приводятся с помощью сигнала коррекции, поступающего из блока коррекции 4. Сигналы х , У и х, у поступают в идентичные вычислительные блоки 11 и 12 соответственно, в каждом из Которых ; реализуется алгоритм вычисления функции цели (1). На выходе блока сравнения 13 получается величина , 11 I дф ф -ф ,гдеФ /(Х, у, Xj ) , Ф(х , Сигнал X, пропорциональный заданному значению качества продукта, формируется в блоке 16 (дистанционарный или автоматический задатчик. Сигнум-реле 14 в зависимости от ..знака дф реверсирует исполнительный механизм 13, непрерывно поддерживая с помощью управляющего воздействия U равенство ЛФ О, что соответствует экстремуму - максимому критерия эффективности, т. е оптимальному режиму оптимизирующего процесса. Формула изрбретени Беспоисковая система экстремального егулирования, например, процессов обогаще- тш, содержащая датчик качества готового продукта и датчик производительности процесса, последовательно соединенные блок сравнения, сигнум-реле и исполнительный , механизм, подключенный к объекту регулирования, и две цепочки, каждая из которых состоит из сумматора и вычислительного блока, вход которого подключен к выходу блока задания качества готового продукта, отличающаяся тем, что, о целью повышения точности регулирования, она содержит блок коррекции и в каждой цепочке-блок умножения, входы которого соединены с выходами соответственно сум матора и блока коррекции, а выход - с , другим входом вычислительного блока, третий вход которого подключен к выходу сумматора, а выход - к соответствующему входу блока сравнения, входы блока коррекции подключены к выходам датчика производительности процесса и датчика качества готового продукта, выход которого подключен также к другим входам сумматоров.
jlU
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспоисковая система экстремального регулирования процессов обогащения | 1979 |
|
SU857932A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| УСТРОЙСТВО для ЭКСТРЕМАЛЬНОЙ НАСТРОЙКИ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU332426A1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| Система автоматического управления измельчительным агрегатом | 1982 |
|
SU1052259A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| Корректирующее устройство | 1985 |
|
SU1278805A1 |
| Способ экстремального регулирования инерционных объектов с транспортным запаздыванием | 1975 |
|
SU1125601A1 |