Изобретение относится к автоматиескому регулированию и предназначео для улучшения динамических харакеристик систем автоматического регуирования .
Целью изобретения является повыение быстродействия корректирующего устройства.
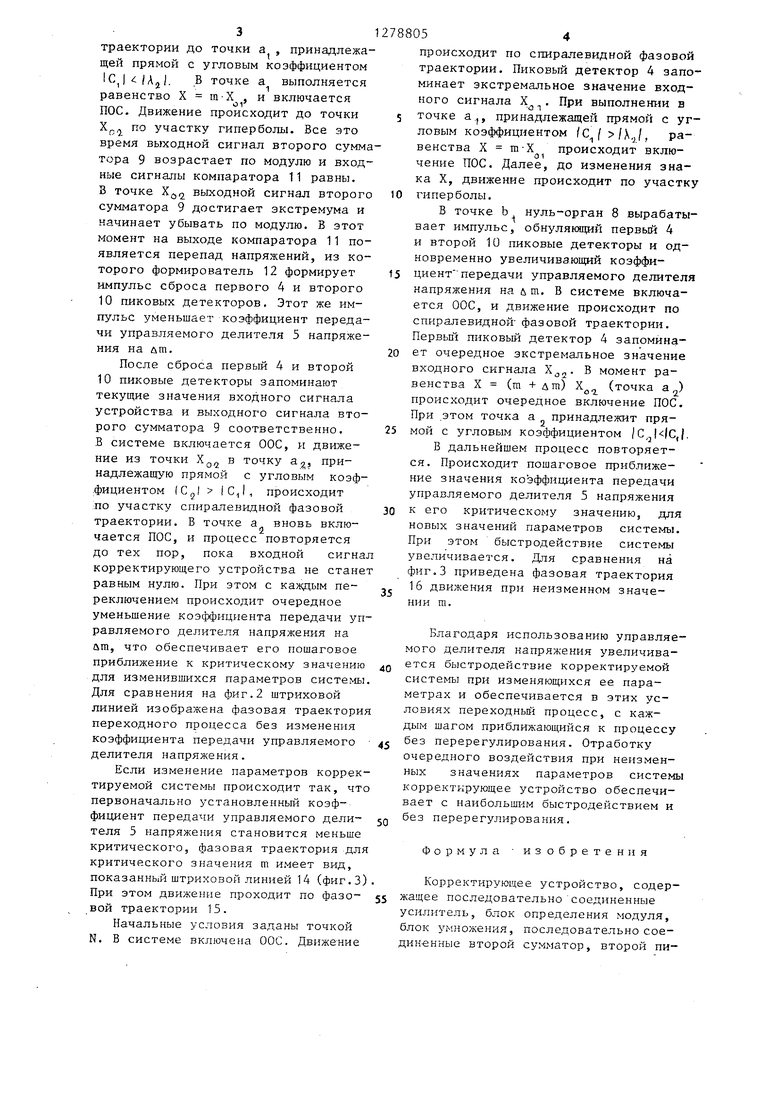
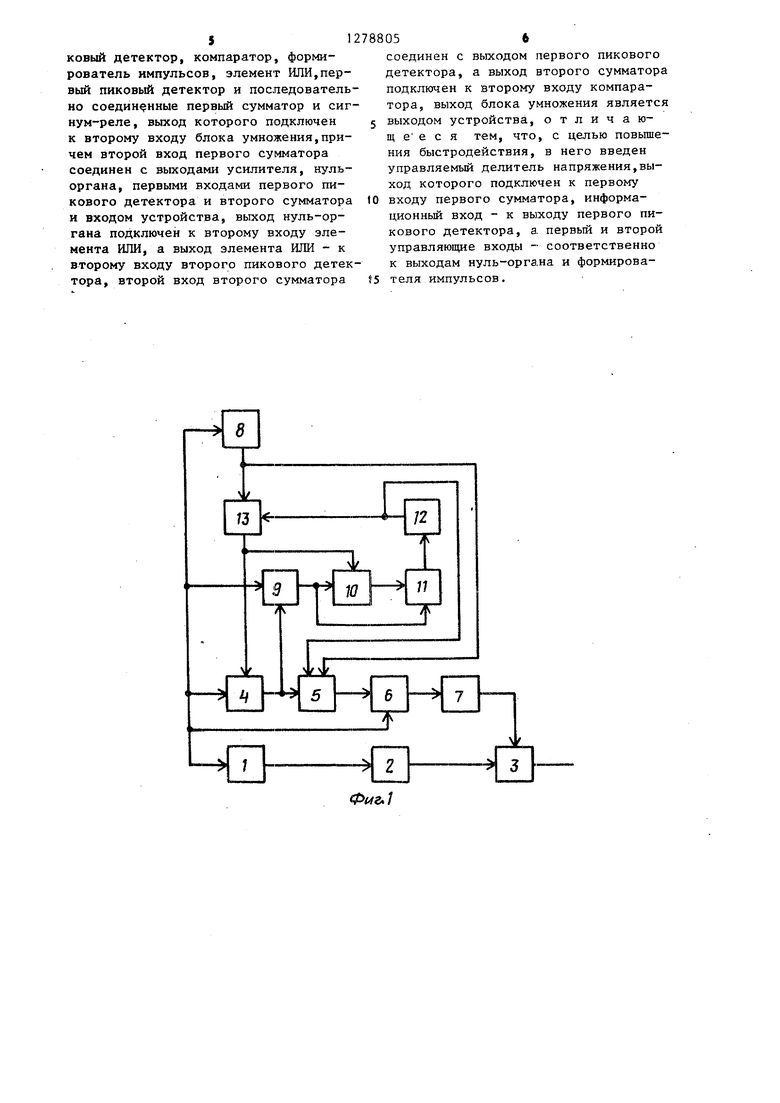
На фиг,1- изображена блок-схема корректирующего устройства, на фиг.2 и 3 - фазовые траектории, поясняющие его работу.
Устройство (фиг.1) содержит уси- литель 1, блок 2 определения модуля, блок 3 умножения, первьй пиковый детектор 4, управляемьй делитель 5 на-- пряжения, первьй сумматор 6,, сигнум- реле 7, нуль-орган 8, второй сумматор 9, второй пиковый детектор 10, компаратор 11, формирователь 12 импульсов к элемент ИЛИ 13. Выход блока умножения является выходом устройства.
Управляемьй делитель 5 напряжения в исходном состоянии обладает коэффициентом передачи m ( 1). При поступлении на первый управляющий вход управляемого делителя 5 напряжения каждого импульса с выхода нуль- органа 8 происходит увеличение его коэффициента передачи на дт, и он становится равным m + , где п - число поступивЕшх импульсов. При поступлении на второй управляющий вход управляемого делителя 5 напряжения каждого импульса из формирователя 12 импульсов происходит уменьшение его коэффидиента передачи на лга, и он становится равньм m -f- п хдга ,
где п - число поступивших импульсов. Реапизуется управляемьй делитель 5 напряжения на базе цифровых или аналоговых управляемых аттенюаторов.
Рассмотрим работу корректирующего устройства на фазовой плоскости (фиг. 2 и 3) на примере системь второго порядка с передаточной функцией
W(P)
Р (ТР + 1)
(1)
где
К К К, (К - коэффициент передачи объекта управления).
Так как корректирующее устройство изменяет не только знак обратной связи уравнения для положительной и отрицательной обратных связей
(ГОС и в виде
D, (}
ООС) в системе соответственно
записываются
д
- KC.
(2)
J i а Л +
1 д
т Л
ь
т
(3)
Для первого случая характерно наличие двух фазовых траекторий в виде прямых, проходящих через начало координат с угловыми коэффициентами, равными корням характеристического уравнения (2) 0;
втором случае при 4 К Т i 1 фазовые траектории имеют вид скручивающихся спиралей.
В исходном состоянии в системе включена отрицательная обратная связь. Начальная величина коэффициента передачи управляемого делителя 5 напряжения выбрана критической. Усилитель 1 усиливает входной сигнал корректирующего устройства.Блок 2 определения модуля преобразует выходной сигнал усилителя 1 к од- нополярному.В блоке 3 умножения происходит присвоение знака выходному сигналу блока 2 определения модуля. Начальные условия заданы на фазовой плоскости точкой N. Движение происходит по фазовой траектории Nd (фиг.2). Пиковьй детектор 4 запоминает экстремальное значение входного сигнала X корректирующего устройства XQ. В первом сумматоре 6 осуществляется сравнение текущего значения входного сигнала устройства с его запомненным экстремальным значением, преобразованным управляемым делителем 5 напряжения. Если коэффициент шфедачи управляемого делитехш напряжения равен критическому, точка d достижения ра
X Ш Х
01
принадлежит пряточс угловым коэффициентом Д .в d происходит включение ПОС, и
венства мой ке
движение происходит по этой прямой. Система обладает при этом наибольшим быстрод€ йствием при отсутствии перерегулирования.
Если происходит такое изменение параметров системы управления, что первоначальный коэ||)фициент передачи управляемого делителя 5 напряжения выше критического, то движение из точки N происходит по спиралевидной
траектории до точки а , принадлежащей прямой с угловым коэффициентом . В точке а выполняется равенство X т-Х , и включается ПОС. Движение происходит до точки Х,, по участку гиперболы. Все это время выходной сигнал второго сумматора 9 возрастает по модулю и входные сигналы компаратора 11 равны. В точке Х выходной сигнал второго сумматора 9 достигает экстремума и начинает убывать по модулю. В этот момент на выходе компаратора 11 появляется перепад напряжений, из которого формирователь 12 формирует импульс сброса первого 4 и второго 10 пиковых детекторов. Этот же импульс уменьшает коэффициент передачи управляемого делителя 5 напряжения на um.
После сброса первый 4 и второй 10 пиковые детекторы запоминают текущие значения входного сигнала устройства и выходного сигнала второго сумматора 9 соответственно. В системе включается ООС, и движение из точки Хд в точку а2, принадлежащую прямой с угловым коэффициентом (Cjl I СJ , происходит :по участку спиралевидной фазовой траектории. В точке а вновь включается ПОС, и процесс повторяется до тех пор, пока входной сигнал корректирующего устройства не станет равным нулю. При этом с каждым переключением происходит очередное уменьшение коэффициента передачи управляемого делителя напряжения на am, что обеспечивает его пошаговое приближение к критическому значению для изменившихся параметров системы Для сравнения на фиг.2 штриховой линией изображена фазовая траектория переходного процесса без изменения коэффициента передачи управляемого делителя напряжения.
Если изменение параметров корректируемой системы происходит так, что первоначально установленный коэффициент передачи управляемого делителя 5 напряжения становится меньше критического, фазовая траектория для критического значения m имеет вид, показанный штриховой линией 14 (фиг.З) При этом движение проходит по фазовой траектории 15.
Начальные условия заданы точкой N. В системе включена ООС. Движение
2788054
происходит по спиралевидной фазовой траектории. Пиковый детектор 4 запоминает экстремальное значение входного сигнала Х . При выполнении в 5 точке a.j, принадлежащей прямой с угловым коэффициентом i).J, равенства X т-Х происходит включение ПОС. Далее, до изменения знака X, движение происходит по участку
10 гиперболы.
В точке b нуль-орган 8 вырабатывает импульс, обнуляющий первьш 4 и второй 10 пиковые детекторы и одновременно увеличивающий коэффи15 циент передачи управляемого делителя напряжения на & т. В системе включается ООС, и движение происходит по спиралевидной фазовой траектории. Первьш пиковый детектор 4 запомина20 ет очередное экстремальное значение входного сигнала Х,,. В момент равенства X (т +дш) Х, (точка а ) происходит очередное включение ПОС. При этом точка а принадлежит пря25 мой с угловым коэффициентом /C,.,|.
В дальнейшем процесс повторяется. Происходит пошаговое приближение значения коэффициента передачи управляемого делителя 5 напряжения
30 к его критическому значению, для новых значений параметров системы. При этом быстродействие системы увеличивается. Для сравнения на фиг.З приведена фазовая траектория 16 движения при неизменном значе35
НИИ т.
Благодаря использованию управляемого делителя напряжения увеличивается быстродействие корректируемой системь при изменяющихся ее параметрах и обеспечивается в этих условиях переходньБ процесс, с каждым шагом приближающийся к процессу
без перерегулирования. Отработку очередного воздействия при неизменных значениях параметров системы корректирующее устройство обеспечивает с наибольшим быстродействием и
50
без перерегулирования.
Формула изобретения
Корректируюрдее устройство, содер- жащее последовательно соединенные усилитель, блок определения модуля, блок умножения, последовательно соединенные второй сумматор, второй пиковый детектор, компаратор, формирователь импульсов, элемент ИЛИ,первый пиковый детектор и последователь но соединенные первый сумматор и сиг нум-реле, выход которого подключен к второму входу блока умножения,причем второй вход первого сумматора соединен с выходами усилителя, нуль- органа, первыми входами первого пикового детектора и второго сумматора и входом устройства, выход нуль-органа подключен к второму входу элемента ИЛИ, а выход элемента ИЛИ - к второму входу второго пикового детек тора, второй вход второго сумматора
78805Ь
соединен с выходом первого пикового детектора, а выход второго сумматора подключен к второму входу компаратора, выход блока умножения является 5 выходом устройства, отличаю- щ е е с я тем, что, с целью повьше- ния быстродействия, в него введен управляемый делитель напряжения,выход которого подключен к первому to входу первого сумматора, информа- ционньй вход - к выходу первого пикового детектора, а первый и второй управляюпще входы - соответственно
к выходам нуль-органа и формирова- 5 теля импульсов.
Ф(&1
Редактор О. Юрковецкая
Рмг.З
Составитель Б. Кирсанов
Техред М.Ходанич Корректор Л. Пат аи
н
Заказ 6835/45Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4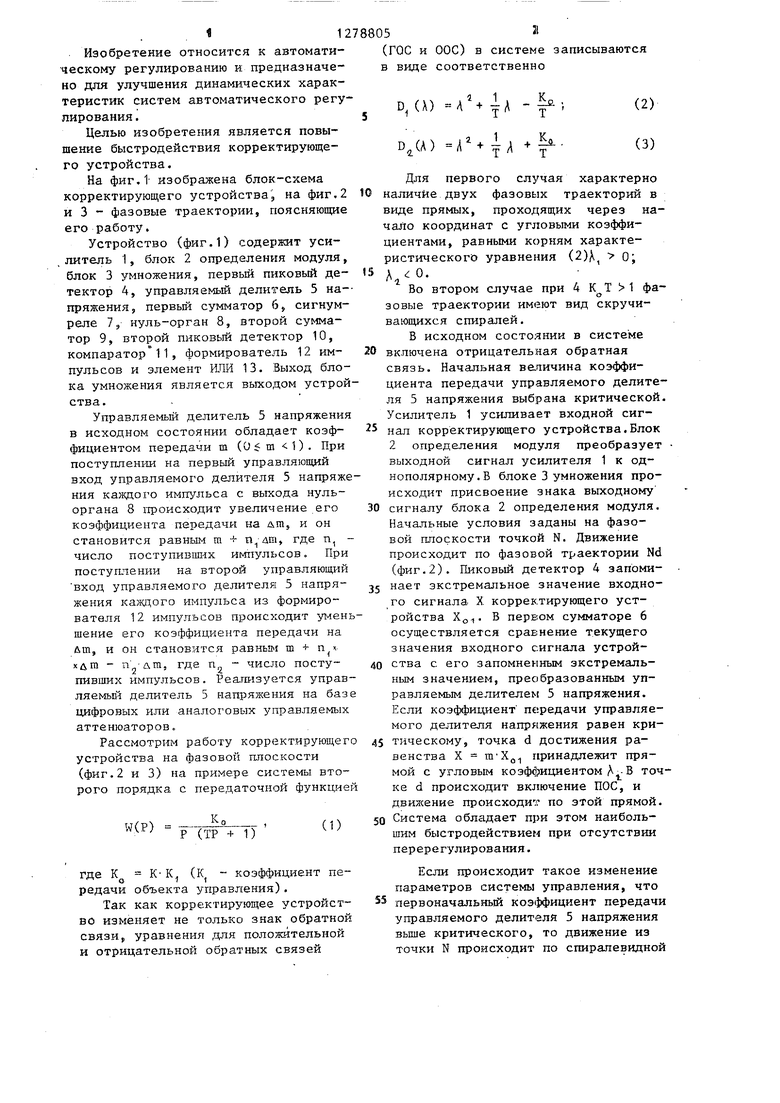
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022312C1 |
| Рентгеновский генератор | 1979 |
|
SU784032A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| ГЛОБАЛЬНО ЛИНЕАРИЗОВАННАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2014 |
|
RU2554535C1 |
| Устройство для контроля деградации МДП-структур | 1990 |
|
SU1783454A1 |
| КВАЗИКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ БИНАРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2566813C1 |
Изобретение относится к области автоматического регулирования и предназначено для улучшения динамических характеристик систем автоматического регулирования. Целью изобретения является повьппение быстродействия корректирующего устройства. Устройство содержит усилитель, блок определения модуля, блок умножения, два пиковых детектора, управляемый делитель напряжения, два сумматора, сигнум-реле, нуль-орган, компаратор,формирователь импульсов и элемент ИЛИ. Сущность изобретения заключается в введении управляемого коэффициента усиления, формирующего процесс коррекции. 3 ил. i W tc 4j 00 00
