Изобретение относится к протезированию и протезостроению, а именно к протезам верхних коне.чностей.
Известно устройство для уменьшения моментов мышечных сил оператора, позволяюшее получать информацию о весе захваченного предмета, содержашее тяговый механизм, звено предплечье - кисть и разгрузочный механизм в виде регулируемого электродвигателя постоянного тока, упругого элемента и самотормозяшейся винтовой пары.
Однако масштаб ош,ушения оператором веса манипулируемого предмета в известном устройстве зависит от углового положения звена предплечье-кисть в момент захвата предмета.
С целью уменьшения моментов мышечных сил оператора пропорционально весу взятого предмета независимо от углового положения звена предплечье-кисть в момент захвата устройство содержит блок выделения управляюшего сигнала, состоящий из датчика углового положения звена предплечье-кисть, например угольного сопротивления,- тензодатчиков давления, расположенных в кисти, и суммируюшего усилителя, связанного с электродвигателем разгрузочного механизма.
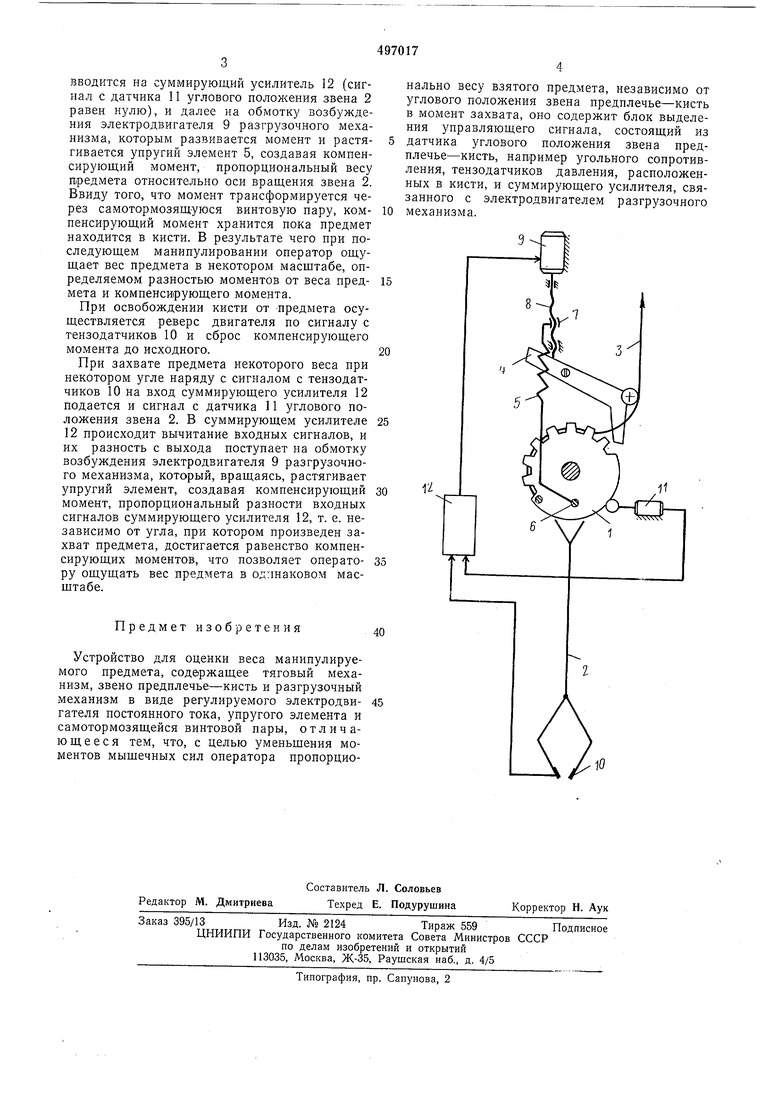
На чертеже изображена кинематическая схема предлагаемого устройства.
Устройство для оценки веса манипулируемого предмета содержит тяговый механизм, состояш,ий из сектора 1, соединенного со звеном 2 предплечье-кисть, тяги 3 и подпружиненной собачки 4; разгрузочный механизм, выполненный в виде упругого элемента 5, приК|репленного одним концом к пальцу 6 на секторе 1, а другим - к гайке 7 самотормозящейся винтовой пары, винт 8 которой кинематически связан с валом регулируемого электродвигателя 9 постоянного тока разгрузочного механизма. Имеется также блок выделения сигнала, состоящий из тензодатчиков 10 давления, расположенных в кисти, датчика 11 углового положения звена 2 предплечье-кисть, например угольного сопротивления, и суммирующего усилителя 12, связанного с электродвигателем 9 разгрузочного механизма.
При отсутствии предмета в кисти предварительно растянутый упругий элемент 5 создает компенсирующий момент, обеспечивающий компенсацию момента от неуравновешепных сил веса звепа 2 предплечье-кисть до уровня, определяемого максимальной чувствительностью оператора, а потому последний через тягу 3 в некотором масштабе ощущает вес управляемого звена.
При взятии предмета по команде оператора при нулевом угле сгибания звена происходит развитие силы схвата. Сигнал с тензодатчиков 10, косвенно связанный с весом предмета, вводится на суммирующий усилитель 12 (сигнал с датчика 11 углового положения звена 2 равен нулю), и далее на обмотку возбуждения электродвигателя 9 разгрузочного механизма, которым развивается момент и растягивается упругий элемент 5, создавая компенсирующий момент, пропорциональный весу предмета относительно оси вращения звена 2. Ввиду того, что момент трансформируется через самотормозящуюся винтовую пару, компенсирующий момент хранится пока предмет находится в кисти. В результате чего при последующем манипулировании оператор ощущает вес предмета в некотором масщтабе, определяемом разностью моментов от веса предмета и компенсирующего момента. При освобождении кисти от предмета осуществляется реверс двигателя по сигналу с тензодатчиков 10 и сброс компенсирующего момента до исходного. При захвате предмета некоторого веса при некотором угле наряду с сигналом с тензодатчиков 10 на вход суммирующего усилителя 12 подается и сигнал с датчика 11 углового положения звена 2. В суммирующем усилителе 12 происходит вычитание входных сигналов, и их разность с выхода поступает на обмотку возбуждения электродвигателя 9 разгрузочного механизма, который, вращаясь, растягивает упругий элемент, создавая компенсирующий момент, пропорциональный разности входных сигналов суммирующего усилителя 12, т. е. независимо от угла, при котором произведен захват предмета, достигается равенство компенсирующих моментов, что позволяет оператору ощущать вес предмета в одинаковом масщтабе. Предмет изобретения Устройство для оценки веса манипулируемого предмета, содержащее тяговый механизм, звено предплечье-кисть и разгрузочный механизм в виде регулируемого электродвигателя постоянного тока, упругого элемента и самотормозящейся винтовой нары, отличающееся тем, что, с целью уменьщения моментов мыщечных сил оператора пропорциольно весу взятого предмета, независимо от лового положения звена предплечье-кисть момент захвата, оно содержит блок выделея управляющего сигнала, состоящий из тчика углового положения звена предечье-кисть, например угольного сопротивния, тензодатчиков давления, расположенх в кисти, и суммирующего усилителя, свянного с электродвигателем разгрузочного еханизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез руки | 1974 |
|
SU506410A1 |
| Привод манипулятора | 1978 |
|
SU730562A2 |
| Привод протеза при вычленении плеча | 1975 |
|
SU548273A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| ПРОТЕЗ КИСТИ | 2012 |
|
RU2506931C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
