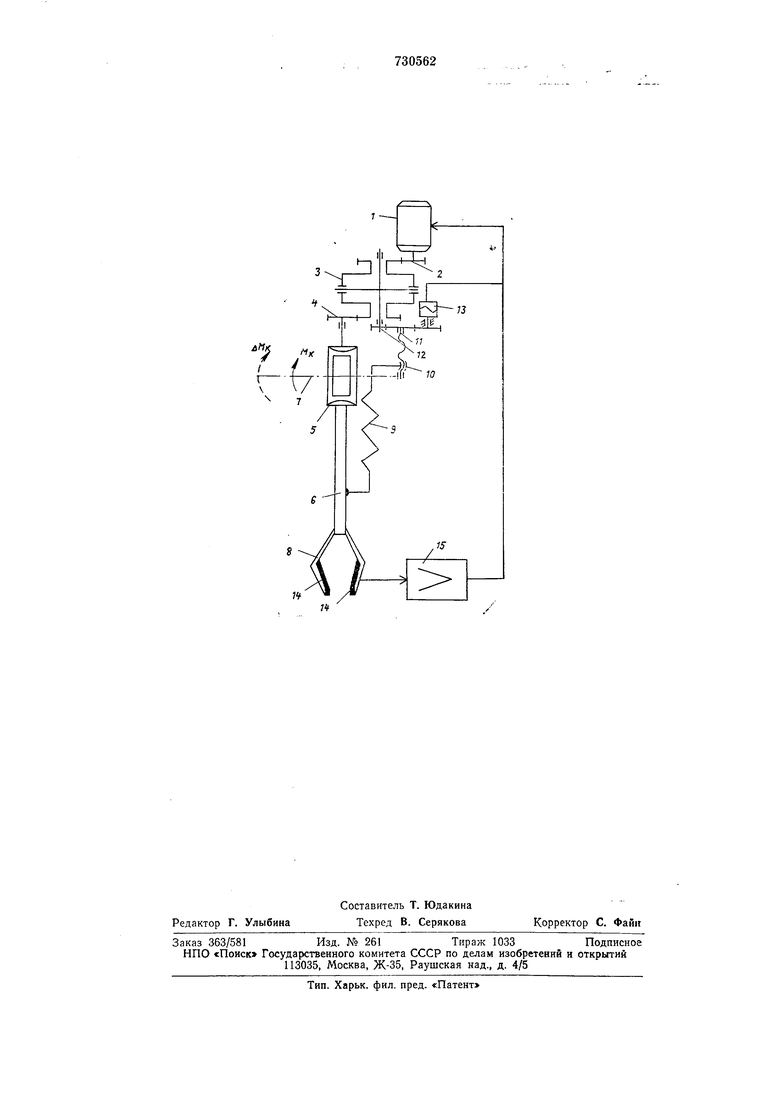
ла соединяется с самотормозящимся червячным редуктором, червячное колесо 5 которого соединяется с управляемым звеном 6, посаженным на оси вращения 7, а управляемое звено заканчивается захватом с губками 8. Имеется разгрузочный механизм, содержащий упругий элемент 9, один конец которого прикреплен к управляемому звену, а другой к гайке 10 самотормозящейся передачи (разгрузочного механизма, винт // которой кинематически связан со второй выходной шестерней 12 дифференциала. Привод манипулятора снабжен электромеханическим механизмом запоминания приращения разгрузочного момента, состоящим из электромагнитного фиксатора 13, например элект1рО(магнитной муфты, кинематически связанного со второй выходной щестерней 12 дифференциала, и блока выделения сигнала, несущего информацию о силе зажима манииулируемого предмета, например тензодатчиков 14, жестко установленных в губках 8 захвата, и усилителя 15. Блок выделения сигнала, управляющая обмотка электромагнитного фиксатора и двигатель соединены электрически.
Привод работает следующим образом.
При подъеме управляемого звена без цредмета в захвате или предмета, момент от веса которого не нревыщает движущийся момент двигателя 1, сигнал с блока выделения сигнала отсутствует, электромагнитный фиксатор 13 находится в нормально замкнутом состоянии, что лищает подвижности выходную шестерню 12 дифференциала 5 и весь момент двигателя / трансформируется по цепи М двигателя - М звена. В этих условиях манипулирование осуществляется только под действием суммы движуихего момента и разгрузочного момента М., определяемого величиной предварительно растянутого упругого элемента.
Зажим предмета, момент веса которого превышает движущий момент двигателя, сопровождается формированием напряжения с блока выделения сигнала, что вызывает переход электромагнитного фиксатора 13 в нормально разомкнутое состояние, расфиксацию второй выходной шестерни 72 дифференциала 5 и вращение вала двигателя /. Это приводит к перемещению
гайки 10 по винту 11 и дополнительному растяжению упругого элемента - формируется дополнительный разгрузочный момент АМк (в этом режиме, несмотря на
5 вращение вала двигателя /, подъем управляемого звена невозможен, так как момент двигателя меньше момента от веса захваченного предмета).
После завершения зажима предмета
0 обесточивается электромагнитный фиксатор, что приводит к ф|иксации второй выходной шестерни дифференциала, в результате чего приращение разгрузочного момента «запоминается.
5 При подаче оператором команды «подъем на двигатель, несмотря на иревыше1 ие момоента от веса захваченного предмета под движущим моментом двигателя, начинается манипулирование предметом под
действием суммы движущего момента и дополнительного разгрузочного момента, который хранится, пока предмет находится в захвате. При освобождении от предмета напряжение с блока выделения сигнала
5 вводится на нормально замкнутый электромагнитный фиксатор 13 и двигатель /- происходит сброс приращения разгрузочного момента.
Наличие электромеханического механизма запоминания п-рирашения разгрузочного момента приводит к снижению энергопотребления привода и улучшению динамики привода.
Формула изобретения
Привод манипулятора по авт. св. № 639697, отличающийся тем, что, с
целью снижения энергопотребления привода и улучщевия его динамик1И, в нем установлен электромеханический механизм запоминания приращения разгрузочного момента, состоящий из блока выделени-я сигнала, несущего информацию о силе зажима манипулируемого предмета, и электромагнитного фиксатора, кинематически связанного со в горой выходной щестерней дифференциала, при этом управляющая обмотка
электромагнитного фиксатора электрически соединена с блоком выделения сигнала и с двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод протеза при вычленении плеча | 1975 |
|
SU548273A1 |
| Протез руки | 1974 |
|
SU506410A1 |
| Устройство для оценки веса манипулируемого предмета | 1974 |
|
SU497017A1 |
| Захватное устройство манипулятора | 1989 |
|
SU1669713A1 |
| ПЕРЕДАЧА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ВРАЩЕНИЯ | 1970 |
|
SU274597A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| Кистевой узел манипулятора | 1979 |
|
SU835734A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2283243C1 |
| МЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ | 2004 |
|
RU2287731C2 |
| Манипулятор | 1979 |
|
SU772839A1 |