кусочно-линейных аппроксиматоров, а второй вход каждой схемы сравнения связан с соответствующим из k входов преобразователя.
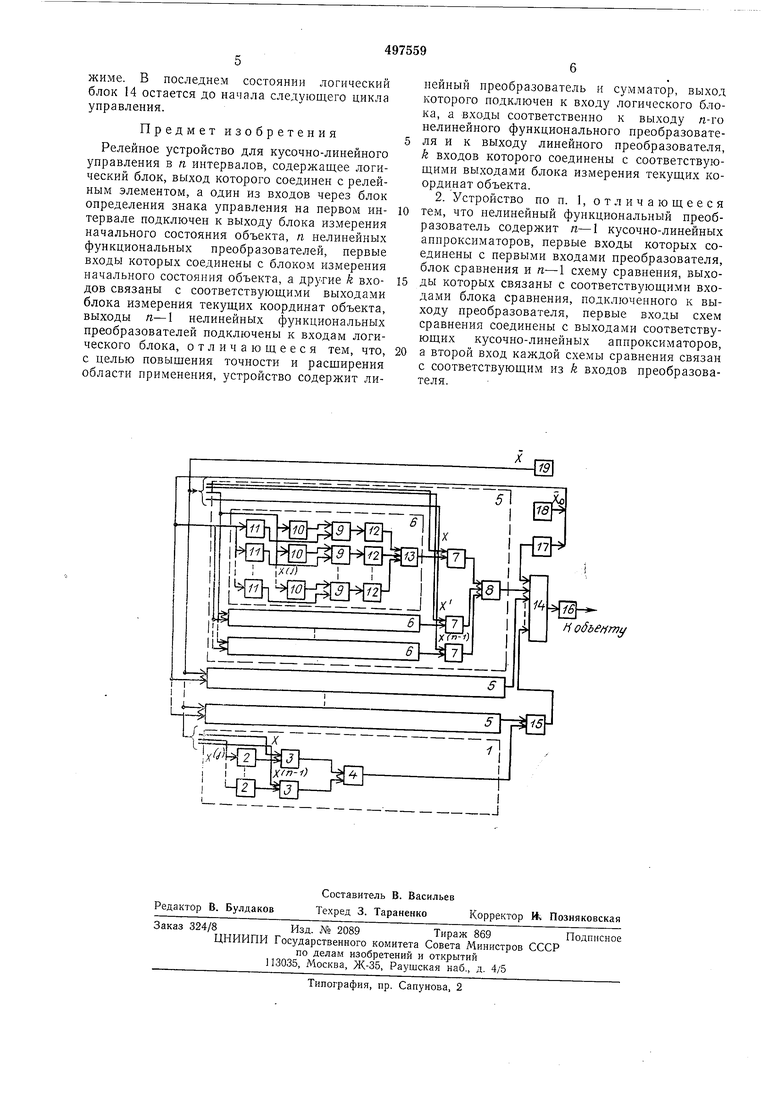
На чертеже представлена блок-.схема устройства.
Она содержит линейный преобразователь 1, в который входят усилители 2 и схемы сравнения 3 и 4, нелинейные функциональные преобразователи 5, содержащие кусочно-линейные аппроксиматоры 6, схемы 7 сравнения и блок 8 сравнения, причем каждый кусочно-линейный апороксиматор 6 содержит схемы сравнения 9, усилители 10, кусочно-линейные преобразователи 11, выпрямители 12 и блок 13 сравнения, логический блок 14, сумматор 15, релейный элемент 16, блок 17 определения знака управления на первом интервале, блок 18 измерения начального состояния объекта и блок 19 измерения текущих координат.
Устройство работает следующим образом. , Информация о начальном состоянии от блока 18 измерения начального состояния объекта одновременно поступает на п нелинейных функциональных преобразователей 5 и на блок 17 определения знака управления на нервом интервале. Выходная величина последнего через логический блок 14 поступает на вход, релейного элемента 16, с выхода которого управляющее воздействие подается на объект. Логический блок 14 осуществляет последовательную коммутацию выходов нелинейных функциональных преобразователей 5 с входом релейного элемента 16. Релейный элемент 16 остается в первом состоянии до тех пор, пока выходная величина первого нелинейного функдионального преобразователя 5 не обратится в нуль. Каждый из п-1 нелинейных функциональных преобразователей реализует алароксимацию соответствующей области переключения, являющейся совокупностью точек i-oro (, ..., п-1) переключения для всей области изменения параметров, в функции от начальных условий. Указанные области переключения аппроксимируются в управляющем устройстве кусочно-линейной зависимости, содерл ащей т участков аппроксимации, причем в зависимости от начальных условий изменяются координаты сопряжения отдельных участков (при этом соответствующие участки аппроксимирующих кривых параллельны при всех начальных условиях).
В функции начальных условий в релейном устройстве происходит смещение проекций аппроксимирующих кривых на фазовые плоскости x(%w (t 0, ..., п-1; ), реализуемых кусочно-линейными аппроксимгггорами 6. Каждый кусочно-линейный аппроксиматор 6 содержит т ценей (в соответствии с числом участков аппроксимации). Информация о состоянии координаты снимается с /-го выхода блока 19 измерения текущих координат объекта, через усилитель 10 поступает на один из входов схемы 9 сравнения, на другой вход которой поступает выходная величина кусочно-линейного преобразователя И. Выпрямители 12 совместно с кусочно-линейными преобразователями 11, на вход которых поступает информация о начальном состоянии объекта от блока 18 измерения начального состояния, формируют точки сопряжения участков прямых в функции от начального состояния, а общий блок 13 сравнения, осуществляя «сщивание отдельных участков, формирует проекцию кусочнолинейной кривой на плоскости , выходная величина указанного блока сравнения первого кусочно-линейного аппроКсиматора 6 сравнивается на первой схеме 7 сравнения с значением координаты объекта, снимаемой с выхода блока 19 измерения текущих координат объекта. Равенство нулю выходной величины этой схемы сравнения соответствует попаданию проекции изображающей точки системы, в плоскости , на первую переключающую кривую. Аналогично работают остальные цепи нелинейного функционального преобразователя 5, осуществлящие реализацию проекций переключающей кривой соответственно на плоскости л:(л;( , ..., x(%(-). Равенство нулю выходной величины нелинейного функционального преобразователя 5 (нуль на выходе блока 8 сравнения соответствует попаданию изображающей точки системы на первую переключающую кривую, в соответствии с чем осуществляется переключение релейного элемента 16 в другое устойчивое состояние, а логический блок 14 подключает к входу релейного элемента 16 выход другого нелинейного функционального преобразователя 5, осуществляющего аппроксимацию в функции от начального состояния совокупности точек второго переключения для всех возможных значений параметров системы. Равенство нулю выходной величины второго нелинейного функционального преобразователя 5 соответствует попаданию изображающей точки системы на указанную переключающую кривую, в соответствии с чем релейный элемент 16 переключается в новое устойчивое состояние, а логический блок 14 осуществляет коммутацию входа релейного элемента 16с выходом следующего нелинейного функционального преобразователя 5. Выходная величина последнего нелинейного функционального преобразователя суммируется на сумматоре 15 с выходной величиной линейного преобразователя 1, который служит для стабилизации конечного состояния системы, так как кусочно-линейные кривые, аппроксимирующие в фазовом пространстве системы указанные области переключения, расположены таким образом, что они не проходят через точку конечного состояния системы. Выходная величина этого сумматора обращается в нуль при попадании изображающей точки системы на последнюю п-1 переключающую кривую, в соответствии с чем релейный элемент 16 переходит в новое состояние и остается в нем до тех пор, пока изображающая точка системы не попадает на линию стабилизации, после чего начнется движение системы в скользящем режиме. В последнем состоянии логический блок 14 остается до начала следующего цикла управления.
Предмет изобретения
Релейное устройство для кусочно-линейного управления в п интервалов, содержащее логический блок, выход которого соединен с релейным элементом, а один из входов через блок определения знака управления на первом интервале подключен к выходу блока измерения начального состояния объекта, п нелинейных функциональных преобразователей, первые входы которых соединены с блоком измерения начального состояния объекта, а другие k входов связаны с соответствующими выходами блока измерения текущих координат объекта, выходы л-1 нелинейных функциональных преобразователей подключены к входам логического блока, отличающееся тем, что, с целью повыщения точности и расщирения области применения, устройство содержит линейный преобразователь и сумматор, выход которого подключен к входу логического блока, а входы соответственно к выходу п-то нелинейного функционального преобразователя и к выходу линейного преобразователя, k входов которого соединены с соответствующими выходами блока измерения текущих координат объекта.
2. Устройство по п. I, отличающееся
тем, что нелинейный функциональный преобразователь содержит л-1 кусочно-линейных аппроксиматоров, первые входы которых соединены с первыми входами преобразователя, блок сравнения и п-1 схему сравнения, выходы которых связаны с соответствующими входами блока сравнения, подключенного к выходу преобразователя, первые входы схем сравнения соединены с выходами соответствующих кусочно-линейных аппроксиматоров,
а второй вход каждой схемы сравнения связан с соответствующим из k входов преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания постоянной скорости резания | 1979 |
|
SU875338A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2088967C1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Функциональный преобразователь | 1980 |
|
SU883923A1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2002 |
|
RU2222048C2 |
| Устройство для управления вибровозбудителем | 1984 |
|
SU1176309A1 |
| Устройство для воспроизведенияфуНКций дВуХ пЕРЕМЕННыХ | 1979 |
|
SU842850A1 |
| Многопороговый функциональный преобразователь | 1985 |
|
SU1300507A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Стохастический кусочно-линейный аппроксиматор | 1978 |
|
SU744602A1 |
I
:г1т
Н обьенту
