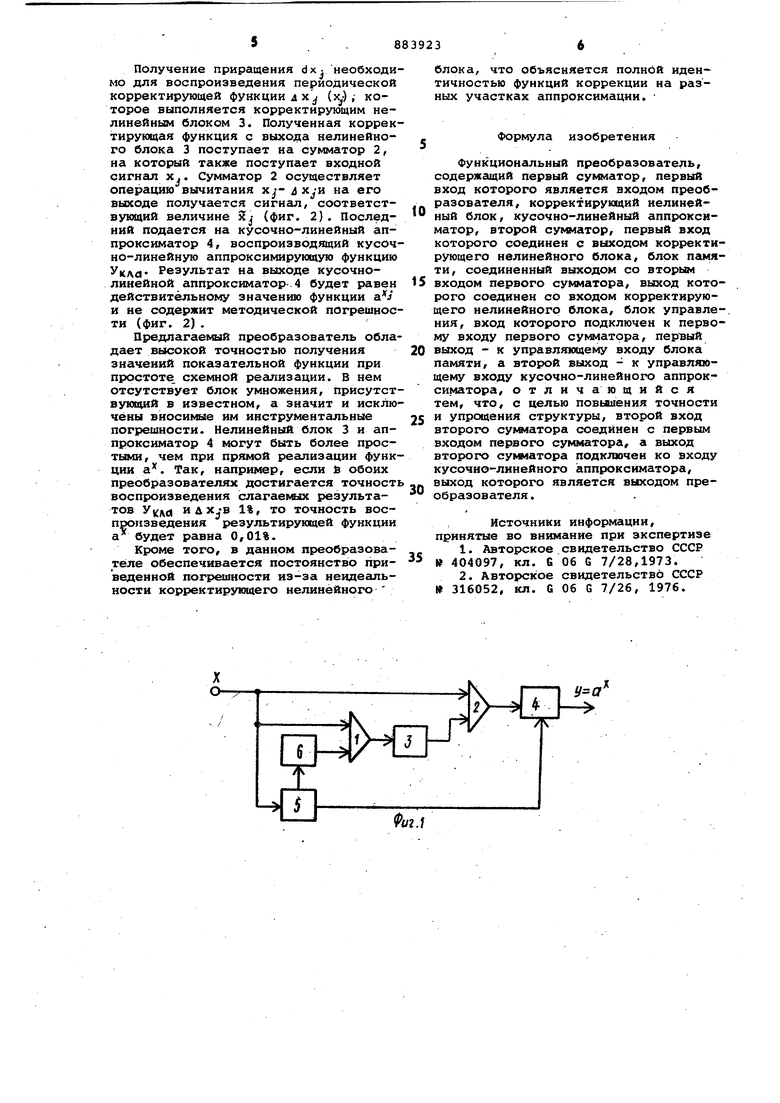
Изобретение относится к области аналоговой и аналого-цифровой вычислительной техники. Известен функциональный преобразователь, содержащий два последовательно соединенных регистра,- выходы которых подключены ко входам цифроаналоговых преобразователей, линию задержки, аналоговый интегратор, вход которрго соедиц,ен с прямым и инверсным выходами цифроаналоговых преобра зователей, выход интегратора является выходом устройства tl3. Недостатком этого преобразователя является невысокая точность воспроиэведения заданной функциональной зависимости, определяемая наличием неустранимой методической погрешности преобразования из-за приближения функции конечным числом линейных отрезков. Наиболее близким техническим решением к предлагаемому является функциональный преобразователь, содержащий первый нелинейный блок, первый вход которого подключен к первому входу блока управления и является входом преобразователя, а выход соединен с первым входом первого сумматора и вторым входом блока управления, выходы которого соединены вторым входом первого нелинейного блока и входом блока памяти, первый вход которого соединен с третьим входом нелинейного блока, второй нелинейный блок, блок умножения, и второй сумматор, входы которого подключены соответственно к входу преобразователя, и второму выходу блока памяти, выход второго сумматора через второй нелинейный блок соединен с первым входом блока управления, второй вход которого подключен к выходу блока управления, а выход соединен с вторым входом первого сумматора 2. Недостатком этого преобразователя является сложность структуры,поскольку в его состав входит блок умножения, который должен осуществлять масштабирование корректирующей функции при переходе с одного участка аппроксимации на другой. Такой блок обычно довольно сложен, (например, в качестве него можно использовать умножающий цифроаналоговый преобразователь) и служит источником дополнительных инструментальных погрешностей. Цель изобретения - повышение точности и упрощение структуры преобразователя. Поставленная цель достигается тем что в функциональном преобразователе содержащем первый сумматор, первый вход которого является входом преобразователя, контактирующий нелинейный блок, кусочно-линейный аппроксиматор, второй сумматор, первый вход которого соединен с выходом корректи рующего нелинейного блока , блок памя ти, соединенный выходом со вторым входом первого сумматора,выход которого соединен со входом корректирукадего блока, блок управления, вход которого подключен к первому входу первого сумматора, первый выход к управляющему входу блока памяти, а второй выход - к управляющему входу кусочно-линейного аппроксиматора второй вход второго сумматора соединен с первым входом первого суммато ра, а выход второго сумматора подключен ко входу кусочно-линейного аппроксиматора, выход которого явля ется выходом преобразователя. . На фиг. 1 приведена структурная схема преобразователя, на фиг.2 графики, поясняющие принцип работы устройства. Преобразователь содержит первый 1 и второй 2 сумматоры, корректирую щий нелинейный блок 3 кусочно-линей ный аппроксиматор 4, блок управления 5 и блок памяти б. Преобразователь работает следующим образом. Работа преобразователя основана на воспроизведении основной аппроксимирующей кусочно-линейной функции YKAOI корректирующей функции и их сум мирования со своими знаками. Для уяс нения принципа работы рассмотрим кусочно-линейную аппроксимацию показательной функции а (фиг. 2) . Выберем узлы аппроксимации через равные интервалы аргумента, а длину интервала обозначим через Н. В известном устройстве функции коррекций определяемые как разность между текущими значениями исходной и аппроксимирующей функций, для различных участков аппроксимации подчиняются преобразованию подобия, т.е. отношение значений функции коррекции любых двух соседних участков для соответствующих значений аргумента рав ныГ: между собой и постоян-ны .К.00.. где А,а,). ., Х,,-У,-4Н ., ie6,N-1 ( N - число участков. При таком построении функции кор рекции рассматривалась аффинная координатная система дy(xj. Рассмотрим теперь случай аффинной системы координат видадх(х), т.е; для текущего значения х определим значение исходной функции y.,-(Xj) и зафиксируем его. Определим теперь точку пересечения прямой YjCxj) и функций У|4ла (фиг. 2). Этой точке будет соответствовать значение аргумента х .. Таким образом, для каждого текущего значения аргумента х.- построена разность дх Xj-SJj, зависящая от Х которую назовем функцией коррекции в координатах AX(XJ). Запишем уравнения Л x(Xj ) для некоторых участков аппроксимации b(j,)(Vt (Xj),,,-H4v,r( ; йх()гео ) bn(jn gV - -hn- 1(aMH). Принимая во внимание соотношения Y; ,,..«Н, .. J3 % vijYjj.«Ji di l l a Va, . Получаем для п-го участка аппроксимацииWAV ,v , Я Xi.)H, ,„ Г Xjt (n-DH (n-iWlx ViX tXj irgoq; 1/ .(пи)( .q -a j () Анализ последнего выражения показывает, что значения функций коррекции не зависят от номера участка и для соответствующих значений аргумента равны между собой. Соответствие устанавливается соотношением х ;(i+i) х-- + Н/ Г4)еобразователь рабсЗтает следующим образом. Входная величина xs поступает на сумматор 1. и блок управления 5. Как и в известном на блок 5 возлагается задача установления номера участка аппроксимации для текущих значений Блок управления 5 вьвдает управляющее воздействие в блок памяти 6,который хранит узловые значения х, аргумента и вадает их на второй вход сумматора 1. Последний осуществляет вычитание соответствующего узлового значения .аргумента из значения входной величины и на его выходе образуется сигнал dxj , который представляет собой приращение аргумента на i-OM участке аппроксимации, где - г -. {Хд.; Х(ц Л , i Щ ,
Получение приращения dxj необходимо для воспроизведения периодической корректирующей функции дх. (х) i которое выполняется корректирующим нелинейным блоком 3. Полученная корректирующая функция с выхода нелинейного блока 3 поступает на сумматор 2, на который также поступает входной сигнал X.. Сумматор 2 осуществляет операцию вычитания xj- на его выходе получается сигнал, соответствующий величине 2j (фиг. 2). Последний подается на кусочно-линейный аппроксиматор 4, воспроизводящий кусочно-линейную аппроксимирующую функцию .а- Результат на выходе кусочнолинейной аппроксиматор-4 будет равен действительному значению функции и не содержит методической погрешности (фиг. 2).
Предлагаемый преобразователь обладает высокой точностью получения значений показательной функции при простоте, схемной реализации. В нем отсутствует блок умножения, присутствующий в известном, а значит и исключены вносиг еле им инструментальные погрешности. Нелинейный блок 3 и аппроксиматор 4 могут быть более простыми, чем при прямой реализации функции а. Так, например, если 6 обоих преобразователях достигается точност воспроизведения слагаемьос результатов H&XJB 1%, то точность воспроизведения результирующей функции а будет равна 0,01%.
Кроме того, в данном преобразователе обеспечивается постоянство приведенной погрешности из-за неидеальности корректирующего нелинейного
блока, что объясняется полнОй идентичностью функций коррекции на разных участках аппроксимации,
Формула изобретения
Функциональный преобразователь, содержащий первый сумматор, первый вход которого является входом преобразователя, корректирующий нелиней0ный блок, кусочно-линейный аппроксиматор, второй сумматор, первый вход которого соединен с выходом корректирующего нелинейного блока, блок памяти, соединенный выходом со вторьш
5 входом первого сумматора, выход которого соединен со входом корректирующего нелинейного блока, блок управления, вход которого подключен к первому входу первого сумматора, первый выход - к управляющему входу блока
0 памяти, а второй выход - к управляющему входу кусочно-линейного аппроксиматора, отличающийся тем, что, с целью повь&аения точности и упрощения структуры, второй вход
5 второго сумматора соединен с первым входом первого сумматора, а выход второго сукматора подкгаочен ко входу кусочно-линейного аппроксиматора, выход которого является выходом пре0образователя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
5 404097, кл. G 06 G 7/28,1973.
2.Авторское свидетельство СССР 316052, кл. G Об G 7/26, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1980 |
|
SU888147A1 |
| Гибридный полигональныйАппРОКСиМАТОР | 1979 |
|
SU809249A1 |
| Цифровой аппроксиматор | 1981 |
|
SU1010619A1 |
| Цифровой функциональный преобразователь | 1977 |
|
SU742947A1 |
| Устройство для вычисления функции двоичной экспоненты | 1985 |
|
SU1305675A1 |
| Гибридный аппроксиматор функции @ - @ | 1982 |
|
SU1049928A1 |
| Гибридный функциональный преобразователь | 1987 |
|
SU1464180A1 |
| Квадратичный преобразователь | 1980 |
|
SU934496A1 |
| УСТРОЙСТВО для КУСОЧНО-КВАДРАТИЧНОЙ АППРОКСИМАЦИИ ФУНКЦИЙiS^,fi-\?-t "JP'ltpT^^ФУ-ЗД и ;i,'';^r «^'.) | 1973 |
|
SU408329A1 |
| Цифровой функциональный преобразователь | 1979 |
|
SU826347A1 |

