(54), СИСТЕМА ОПТИГ ЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО
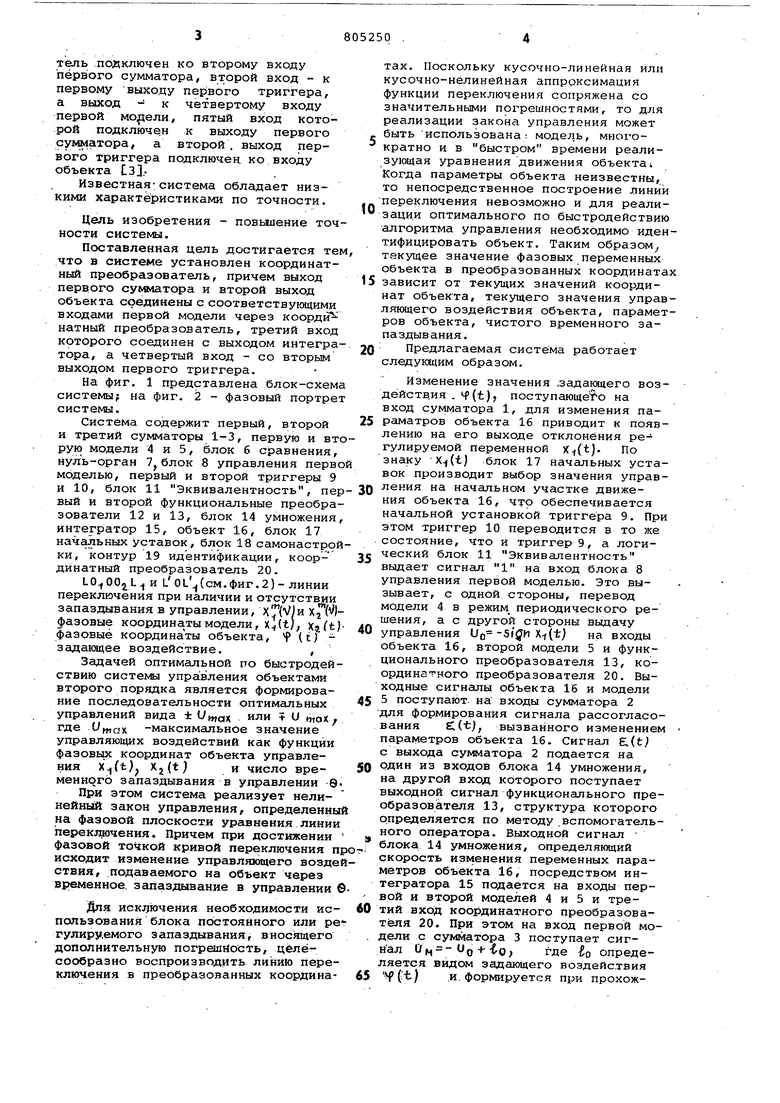
- ПОРЯДКА . гель .подключен ко второму входу первого сумматора, второй вход - к первому выходу первого триггера, а выход - к четвертому входу первой морели, пятый вход которой подключены к выходу первого суи-платора, а второй . выход первого триггера подключен, ко. входу объекта ИзЗ.Известная:система обладает низкими характеристиками по точности. Цель изобретения - повыиение точности системы. Поставленная цель достигается тем что в системе установлен координатный преобразователь, причем выход первого сул 1атора и второй выход объекта соединены с соответствующими входами первой модели через коордй натный преобразователь, третий вход которого соединен с выходом интегратора, а четвертый вход - со вторым выходом первого триггера. На фиг. 1 представлена блок-схема системы; на фиг. 2 - фазовый портрет cncTeNW. Система содержит первый, второй и третий сумматоры 1-3, первую и вт рую модели 4 и 5, блок б сравнения, нуль-орган 7 блок 8 управления перво моделью, первый и второй триггеры 9 и 10, блок 11 Эквивалентность, пер вый и второй функциональные преобразователи 12 и 13, блок 14 умножения интегратор 15, объект 16, блок 17 начальных Уставок, блок 18 самонастрой ки, контур 19 идентификации, координатный преобразователь 20. и LОL(см.фиг. 2)- линии переключения при наличии и отсутствии запаздывания в управлении, хТМи фазовые координаты модели, X(t), x(t фазовые координаты объекта, Т {tj заданнцее воздействие. , Задачей оптимальной по быстродей ствию системы управления объектами второго порядка является формирование последовательности оптимальных управлений вида ± или t U щах f где -максимальное значение управляющих воздействий как функции фазовцх координат объекта управления X,ft) i{t) и число времениого запаздывания в управлении 9 При этом система реализует нелинейный закон управления, определенны на фазовой плоскости уравнения линии переклпочения. Причем при достижении фазовой точкой кривой переключения п исходит изменение управляющего возде ствия, подаваемого на объект через временное, запаздывание в управлении Для иск; ючения необходимости ис пользования блока постоянного или ре гулиру,емого запаздывания, вносящего дополнительную погрешность, целесообразно воспроизводить линию пере ключения в преобразованных координа тах. Поскольку кусочно-линейная или кусочно-нелинейная аппроксимация функции переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована: модель, многократно и в быстром времени реализующая уравнения движения объекта4 огда параметры объекта неизвестны, то непосредственное построение линий ереключения невозможно и для реализаци.и оптимального по быстродействию алгоритма управления необходимо идентифицировать объект. Таким образом текущее значение фазовых переменных объекта в преобразованных координатах зависит от текущих значений координат объекта, текущего значения управляющего воздействия объекта, параметров объекта, чистого временного запаздывания. Предлагаемая система работает следующим образом. Изменение значения .задающего воздейств.ия . Plt); поступающе о на вход сумматора 1, для изменения параматров объекта 16 приводит к появлению на его выходе отклонения регулируемой переменной X-f(t). По знаку K-f(t} блок 17 начальных уставок производит выбор значения управления на начальном участке движения объекта 16, что обеспечивается начальной установкой триггера 9. При этом триггер 10 переводится в то же состояние, что и триггер 9, а логический блок 11 Эквивалентность выдает сигнал 1 на вход блока 8 управления первой моделью. Это вызывает, с одной стороны, перевод модели 4 в режим периодического решения, а с другой стороны вьщачу управления (И Х-((1г) на входы объекта 16, второй модели 5 и функционального преобразователя 13, координатного преобразователя 20. Выходные сигналы объекта 16 и модели 5 поступают, на входы сумматора 2 для формирования сигнала рассогласования €(t), вызванного изменением параметров объекта 16. Сигнал E.{t) с выхода сумматора 2 подается на один из входов блока 14 умножения, на другой вход которого поступает выходной сигнал функционального преобразователя 13, структура которого определяется по методу вспомогательного оператора. Выходной сигнал блока 14 умножения, определяющий скорость изменения переменных параметров объекта 16, посредством интегратора 15 подается на входы первой и второй моделей 4 и 5 и третий вход координатного преобразователя 20. При этом на вход первой модели с сумматора 3 поступает сигнал OH где io определяется видом задающего воздействия -Sp (.-fc) .и. формируется при прохождении f (t) через функциональный преобразователь 2. Изменения переменных объекта 16 X(t) ц X3,(t) через координатный преобразователь 20, где происходит преобразование координат с целью компенсации чистого временного запаздывания, поступают как начальные условия в модель 4, Как только координата модели 4
Xj(V), где V-t//i,ju -MacmTa6 времени, образуемый в процессе решения моделью 4 уравнений движения объекта 16, принимает нулевое значение, нуль-орган 7 вырабатывает сигнал, поступающий на входы блока управления моделью и блок 6 сравнения. При этом блок 6 сравнения определяет знак переменной X(V/,noступающей на его другой вход, и возбуждает в зависимости от значения
siffn )f(V) один из входов триггера 9. Поскольку до достижения изображающей точкой объекта 16 линии переключения знак переменной X-f(t) .не меняется, то начальное значение управления UQ сохраняется неизменным. В то же время сигнал, поступающий с нуль-органа 7 на блок управления моделью 8,. вызывает изменение режима работы модели 4, переводя ее в режим задания начальных условий. После этого, весь режим работы систеки повторяется до тех пор, пока при возбуждении нуль-органа 7 блок 6 сравнения не определит изменения знака переменной X4(VJ при Xi(V) 0 Это свидетельствует о прохождении т;раектории изображающей точки модели .4 через начало координат системы. Пр этом триггер 9 изменяет свое состояние, а значит и управление UQ .
Поскольку состояние триггеров 9 и 10 в этом случае не совпадает, то логический блок 11 Эквивалентность останавливает решение на модели 4. Движение объекта 16 при подобном управлении происходит по траектории. обеспечивающей минимальную длительность процесса управления.
Результаты исследований показывают, что по сравнению с известной системой повышается точность реали0зации процесса управления на 35% при сохранении быстродействия.
.Формула изобретения
15
Система оптимального управления объектами второго порядка по авт. св. 651308, о .т л и ч а ю щ а яс я тем, что, с целью повышения . 20 точности системы, в ней установлен координатный преобразователь, причем выход первого сумматора и второй выход объекта соединены с соответствующими входами первой модели через координатный преобразователь, третий
25 вход которого соединен с выходом интегратора, а четвертый вход - со вторым выходом первого триггера.
Источники информации.
30,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 1934939/18-24,
кл. q 05 В 13/02, 18.06.73.
2.Авторское свидетельство СССР 35 № 643833, кл. Q 05 В 13/02, 17.09,76.
3. Авторское свидетельство СССР № 651308, кл. G 05 В 13/02, .77. (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления колебательными объектами второго порядка | 1973 |
|
SU499553A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU813359A1 |
| Система оптимального управления объектами второго порядка | 1980 |
|
SU920634A2 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Система оптимального управления объектами второго порядка | 1976 |
|
SU643833A1 |
| Система оптимального управления объектами второго порядка | 1981 |
|
SU954934A2 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Система оптимального управления с моделью объектами второго порядка | 1980 |
|
SU888071A1 |
| Система оптимального управления объектами второго порядка | 1978 |
|
SU744451A2 |
| УСТРОЙСТВО для СИНТЕЗА ОПТИМАЛЬНЫХ УПРАВЛЯЮЩИХ | 1972 |
|
SU341013A1 |

