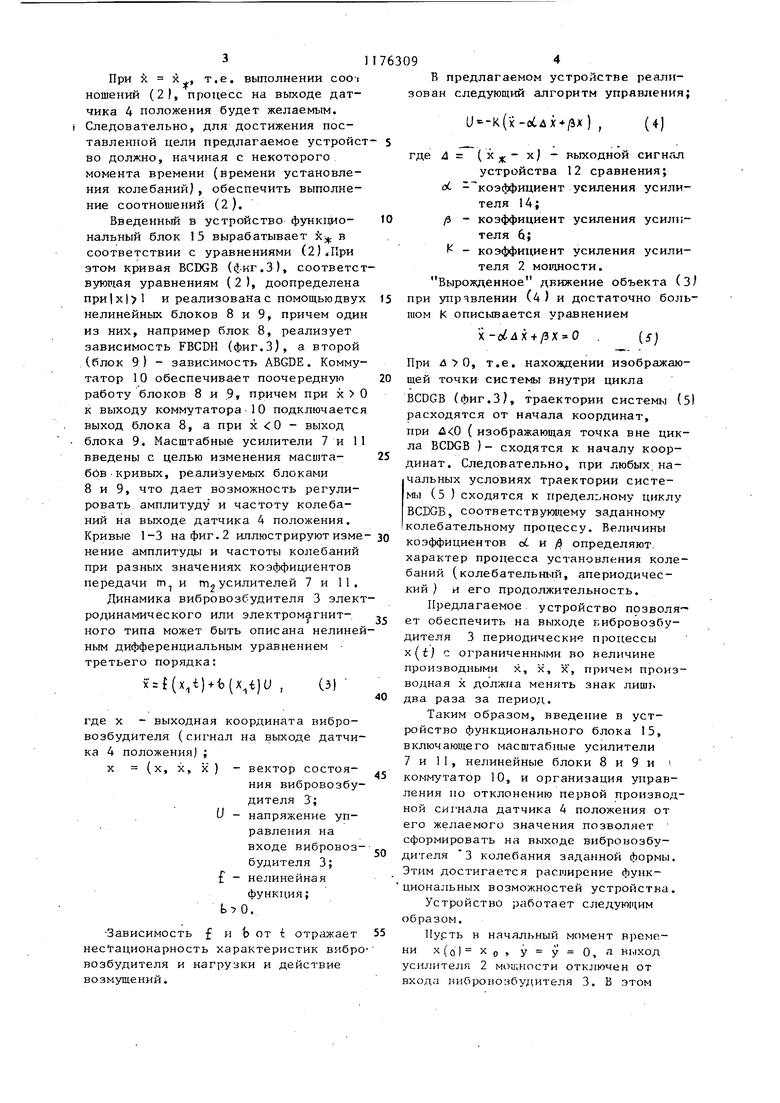
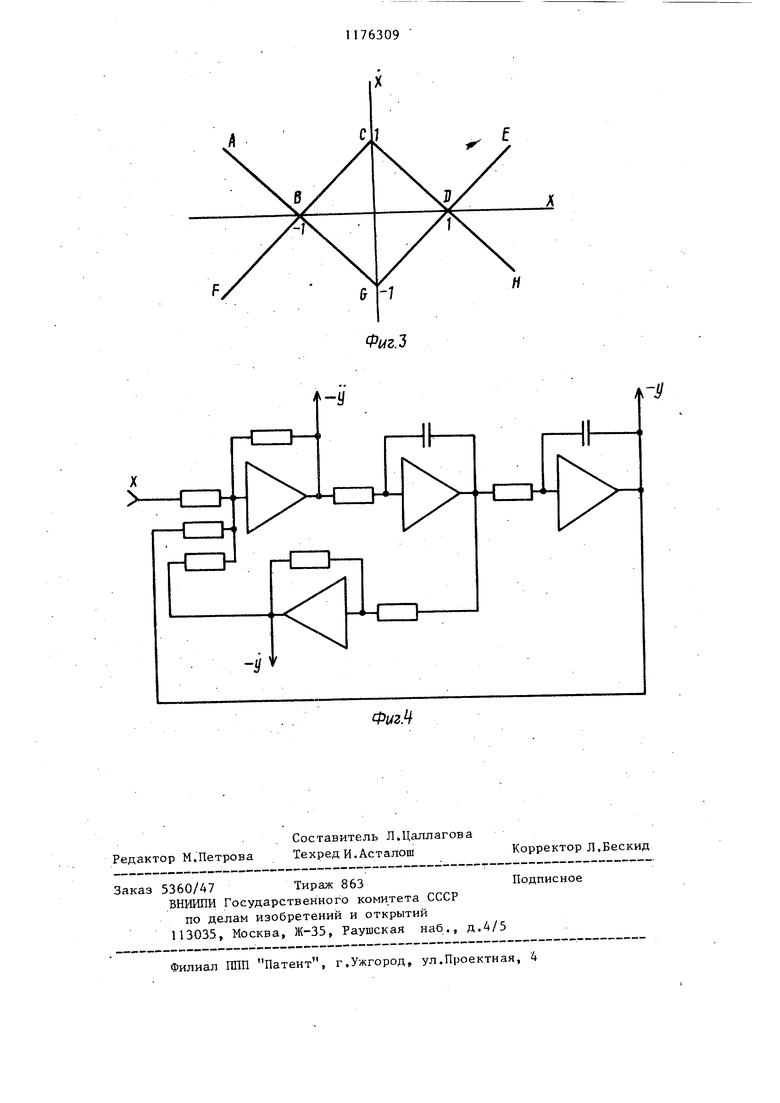
Изобретение относится к виброиспытаниям и может -быть использовано для управления электродинамическими, электрогидравлическими или элект р(змагнитными вибровозбудителями. Цель изобретения - расширение области применения устройства. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг, 2 - графики процессов на выходе датчика положения подвижной час ти вибровозбудителя; на фиг. 3 - зав симости, реализуемые нелине:йными бло ками и соответствук1т1ие процессам на фиг.2; на фиг. 4 - принципиальная схема одного из вариантов выполнения блока дифференцирования. Предлагаемое устройство (фиг.1 содерясит последовательно соединенные суммирующий блок и усилитель - 2 мощ ности,, выход которого подключен к . входу вибровозбудителя 3. Выход датч ка 4 положения подвижной части вибровозбудителя 3 подсоединен к входу блока 5 дифференцирования, через пер вый усилитель 6 - к второму входу суммирующего блока 1 и через первый масштабный усилитель 7 - к входам нелинейных блоков 8 и 9. Выходы блоков 8 и 9 через последовательно соединенные коммутатор 10 и второй масштабный усилитель 11 подключены к вх ду блока 12 сравнения. Первый выход блока 5 дифференцирования подсоединен к первому входу суммирующего бло ка 1, второй выход блока 5 подключен к второму входу блока 12 сравнения, первому входу блока 13 перемножения и к управляющему входу коммутатора 10. Выход блока 12 сравнения через второй усилитель 14 подключен к второму входу блока 13, выход кото рого подсоединен к третьему входу суммирующего блока 1. Блоки 7-11 структурно объединены в.функциональный блок 15. В качестве датчика 4 полол(ения может быть использован любой серийно выпускаемый датчик линейного перемещения, например типа ДПП-, Блок 5 дифференцирования может быть выполнен в виде двух бло,ков датчика скорости к датчика ускорени либо в виде дифференцирующего фильт ра (.фиг.4), осуществляющего решение дифференциального уравнения ( + + l,4(Uy + у- x(t), где у, у, у оценки соответственно X, х, х; |И - постоянная времени. При выборе Р,, гдеа)о.кс максимальная воспроизводимая частота, динамика дифференцирующего фильтра мало сказывается на динамике всей системы и можно считать х-у, Ji- у Нелинейные, блоки 8 и 9 могут быть реализованы на диодных ячейках методом кусочно-линейной аппроксимации, либо использованы стандартные, например БН-ЗА (от аналоговой вычислительной мапдины МНЕ-1-). Коммутатор 10 может быть выполнен на базе компаратора типа 521 САЗ, нагрузкой которого является электромагнитное реле с переключающими контактами , При этом один вход компаратора является управляющим входом коммутатора, на второй вход компаратора подан нулевой потенциал, крайние контакты переключающей группы реле являются входами коммутатора, а средний (подвижный) контакт - его выходом. Коммутатор 10 подключает к входу усилителя 11 выход либо блока 8, либо блока 9 в зависимости от знака сигнала науправляющем входе, В предлагаемом устройстве реализовано управление по отклонению первой производной выходного сигнала датчика 4 положения от ее желаемого значения, формируемого функциональным блоком 15. Пусть, например, на выходе датчика 4 положения необходимо реализовать периодический процесс: -t Т X 1-е % О . -i-; t Т Т х. 1--е , т зт X -1-е , t X -1-е -|- t Т, где Т - период колебаний (кривая 1 на фиг.2). Процессу (1 ) соответствует кривая на фазовой плоскости (x,xj. Ее уравнение можно найти, продиффер.енцировав (1 )по i и освободившись затем от параметра {: х: , - х+ 1 при X О, X О; X . х-1 при X 0, X 0; X JJ -х-1 при .X 0, X 0; х. прих О, , (2) где X;. - желаемое значение производной X , При X X , т.е. выполнении сооч ношений (2), процесс на выходе датчика 4 положения будет желаемым. i Следовательно, для достижения поставленной цели предлагаемое устройс во должно, начиная с некоторого момента времени (времени установления колебаний), обеспечить выполнение соотношений (2). Введенный в устройство функ1 ональный блок 15 вырабатывает х; в соответствии с уравнениями (2)При этом кривая BCDGB (фиг.З), соответс вующая уравнениям (2 ), доопределена при|х1 1 и реализована с помощью двух нелинейных блоков 8 и 9, причем оди из них, например блок 8, реализует зависимость FBCDI1 (фиг.З), а второй (блок 9) - зависимость ABGDE. Комму татор 10 обеспечива-ет поочереднуш работу блоков 8 и .9 причем при х к выходу коммутатора1 О подключаетс выход блока 8, а при х 0 - выход . блока 9. Масштабные усилители 7 и 1 введены с целью изменения масштабОВкривых, реализуемых блоками 8 и 9, что дает возможность регулировать амплитуду и частоту колебаний на выходе, датчика 4 положения. Кривые 1-3 на фиг. 2 иллюстрируют изме нение амплитуды и частоты колебаний при разных значениях коэффициентов передачи т и trig усилителей 7 и 11. Динамика вибровозбудителя 3 элек родинамического или электромагнитного типа может быть описана нелине ным дифференциальным уравнением третьего порядка: x {(x,t) + fc()U , (3) где X - выходная координата вибровоэбудИтеля (сигнал на выходе датчи ка 4 положения); X (х, X, х ) - вектор состояния вибровозбу дителя 3; и - напряжение управления на входе вибровоз будителя 3; f - нелинейная функция; Зависимость и fo от i отражает несгационарность характеристик вибр возбудителя и нагрузки и действие возмущений. 09 В предлагаемом устройстве реализован следующий алгоритм управления; и -к(х-оСдЬ/Зх) , где Л ()- выходной сигнал устройства 12 сравнения; 0 -коэффициент усиления усилителя 14; ft коэффициент усиления усилителя 6 коэффициент усиления усилителя 2 мо1щости. Вырожденное движение объекта (З) при упрявлении (4 ) и достаточно большом К описьшается уравнением При , т.е. нахождении изображающей точки системы внутри цикла BCDGB (фиг.З), траектории системы (5) расходятся от начала координат, при ( изображающая точка вне цикла BCDGB )- сходятся к началу координат. Следовательно, при любых начальных условиях траектории системы (5 ) сходятся к предел: ному циклу BCDGB, соответствующему заданному колебательному процессу. Величины коэффициентов оС и /3 определяют, характер процесса установления колебаний (колебательшда, апериодический ) и его продолжительность. Предлагаемое устройство П9зволяет обеспечить на выходе вибровозбудителя 3 периодические процессы x(t с ограниченными во величине производными X, X, х , причем производная X должна менять знак лишь два раза за период. Таким образом, введение в устройство функционального блока 15, включающего масштабные усилители 7 и 1I, нелинейные блоки В и 9 и коммутатор 10, и организация управления по отклонению первой производной сигнала датчика 4 положения от его желаемого значения позволяет сформировать на выходе вибронозбудителя 3 колебания заданной формы. Этим достигается расширение функциональных возможностей устройства. Устройство ;)аботает следую1цим образом. Пурть в начальный момент времени Х(О)ХО,, а ныход усилителя 2 мои;ь ости отключен от входа ннбронозбудителя 3. Б этом
случае на выходе усилителя 2 мощности формируется сигнал
tl-MX , где К - коэффициент усиления усилйтеля 2 мощности; 1Ь - коэффициент передачи усилителя 6.
После подключения выхода усилителя 2 мощности к входу вибровозбудйтеля 3 подвижный элемент последнего приходит в движение, что влечет за собой изменение сигнала на выходе датчика А положения и появление сигналов,, у, у на выходах блока 5 дифференцирования. Изменяющийся сигнал с выхода датчика 4 через усилитель 7 поступает на входы блоков 8 и 9. Коммутатор 10 в зависимости от знака сигнала, поступающего на его управляющий вход из блока 5, подключает к входу усилителя 11 выход либо блока 8, либо блока 9. В результате на выходе усилителя 11 формируется сигнал, пропор циональный желаемому значению х, певой производной сигнала х. Этот сигнал сравнивается в блоке 12 с поступающей из блока 5 оценкой у , действительного значения производной Разност ный сигнал л с выхода блока 12 усиливается в -oL раз усилителем 4 и умножается блоком 13 на сигнал оценки У, поступающий из блока 5. Сигналы оС 4S с выхода блока 13 перемножения, у с выхода блока 5, пропорциональный величине второй производной сигнала х, а также усиленный в раз усилителем 6 сигнал х с выхода датчика 4 положения суммируются блоком 1 и усиливаются далее по мощности блоком 2. в результате на выходе усилителя 2 мощности формируется следующий алгоритм управления:
и -K(5-ei()y+/}x). .
Как бьто показано, такой алгоритм управления обеспечивает стремление к нулю формируемой на выходе блока 1 разности между действительным и желаемым значениями первой производной сигнала х на выходе датчика 4 положения. По истечении времени, определяемого величинами коэффициентов 0 и /3 , подвижный элемент вибровозбудителя 3 будет соверщать колебания заданной формы.
Наиболее эффективная работа предлагаемого устройства обеспечивается при использовании усилителя 2 мощности с релейной характеристикой В этом случае устройство будет работать в режиме скольжения, что позволяет эффективно парир овать нестационарность характеристик вибровозбудителя и дейст-вие возмущений, а таже повысить КПД устройства при одновременном снижении стоимости усилителя мощности.
Диапазон рабочих частот устройства может быть существенно расширен, если в качеств.е коммутатора 10 использовать интегральный коммутатор типа К590КН2 или подобный ему.
Выполнение усилителя 14 в виде двухпозиционного реле дает возможность путем увеличения коэффициента передачи усилителя 6 уменьшить время установления колебаний на выходе вибровозбудителя 3.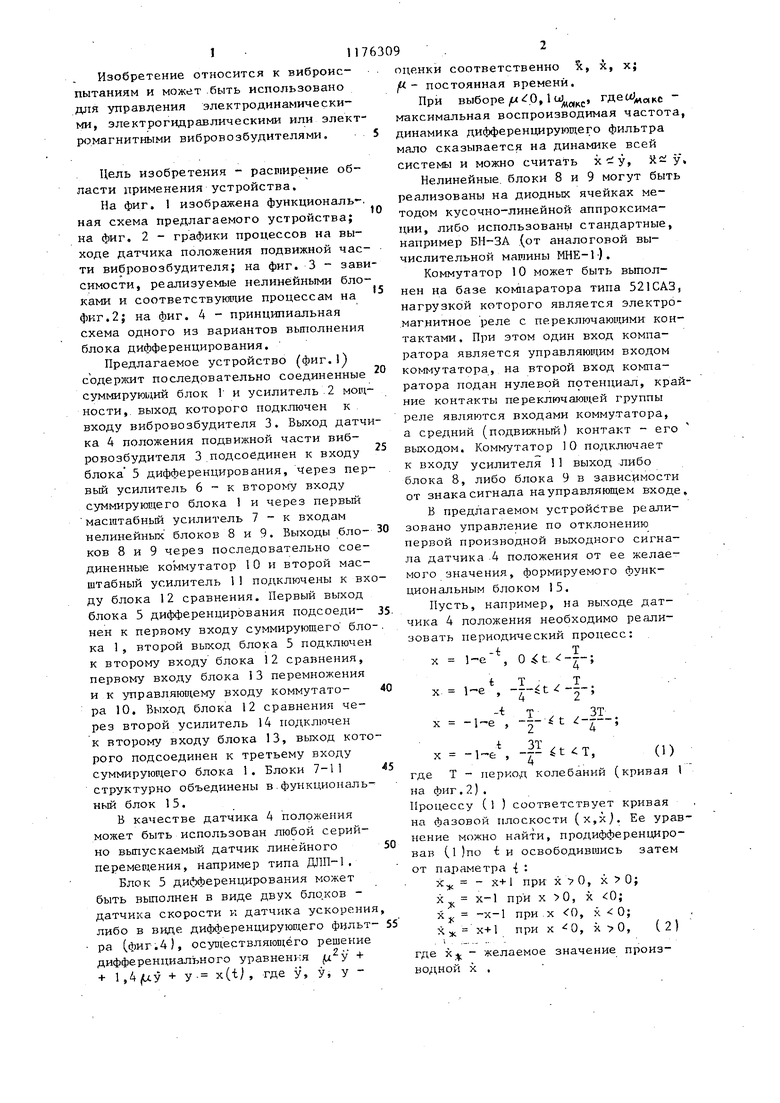
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вибровозбудителем | 1981 |
|
SU1012064A1 |
| Система управления вибровозбудителем | 1984 |
|
SU1171763A1 |
| Система управления вибратора | 1986 |
|
SU1315936A1 |
| Система управления линейным двигателем постоянного тока | 1981 |
|
SU980241A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1981 |
|
SU1103339A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения (его варианты) | 1984 |
|
SU1241404A1 |
| Устройство для управления двухобмоточным двигателем возвратно-поступательного движения | 1982 |
|
SU1108598A1 |
| Электродинамический вибратор | 1977 |
|
SU659199A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВИБРОВОЗБУДИТЕЛЬ:М, содержащее последовательно соединенные суммирую- щий блок и усилитель мощности, выход которого подключен к входу вибровозбудителя. Датчик положения подвижной части вибровозбудителя, связанный выходом через первый усилитель с первым входом суммирующего блока и с входом блока дифференцирования, первый выход которого подключен к второму входу суммирующего блока, а второй выход - к первому входу блока перемножения, соед;иненного выходом с третьим входом суммирующего блока, а также последовательно соединенные блок сравнения и второй усилитель, выход которого подключен к второму входу блока перемножения, отличающееся тем, что, с целью расширения области применения устройства, ОНО содержит функциональный преоб эазователь, включаю1ций в себя последовательно соединенные первый масштабный усилитель, первый нелинейный блок, коммутатор, второй масштабный усилитель, а также второй нелинейный блок, вход которого связан с выходом первого масштабного , а выход - с BTojibiM входом коммутатора, причем выход (Л датчика положения соединен с входом первого масштабного усилителя функционального преобразователя, второй выход блока дифференцирования подключен к управляющему входу коммутатора функциона;и5ного преобразователя и к первому входу блока срав нения, второй вх1:.д которого связан а с выходом второго масштабного ycHJnfсо о со теля функционального преобразователя .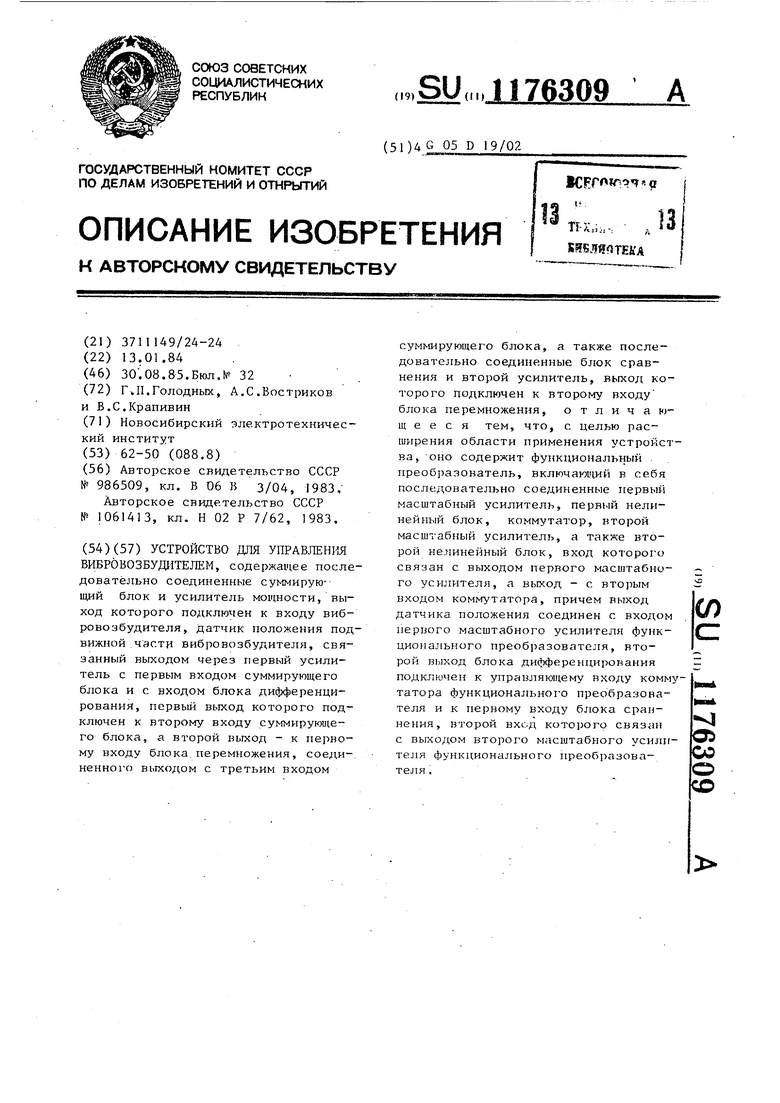
/П; ,5
т2°о,5
Фтг-г
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
