1
Изобретение относится к автоматическому управлению и предназначено для использования в контурных системах программного управления станками.
Известен круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, ко входу нодинтегральной функции которого подключен выход регистра программируемой линейной скорости, а выход соединен со -входами независимой переменной интеграторов синуса и косинуса угла наклона радиуса окружности, выходы которых через накопители координатных приращений подключены к соответствующим схемам управления приводами и схемам окончания интерполирования, соединенным с регистрами конечных значений координат, а также регистр программируемого радиуса.
Отличие описываемого интерполятора состоит в том, что он содержит схему определения величины дискреты подынтегральных функций и два вентиля, причем кодовые входы вентилей соединены с выходами схемы определения величины дискреты подинтегральных функций, ко входу которой подключен регистр программируемого радиуса, управляющий вход первого вентиля соединен с выходом интегратора синуса угла наклона радиуса окружности, а выход - со входом
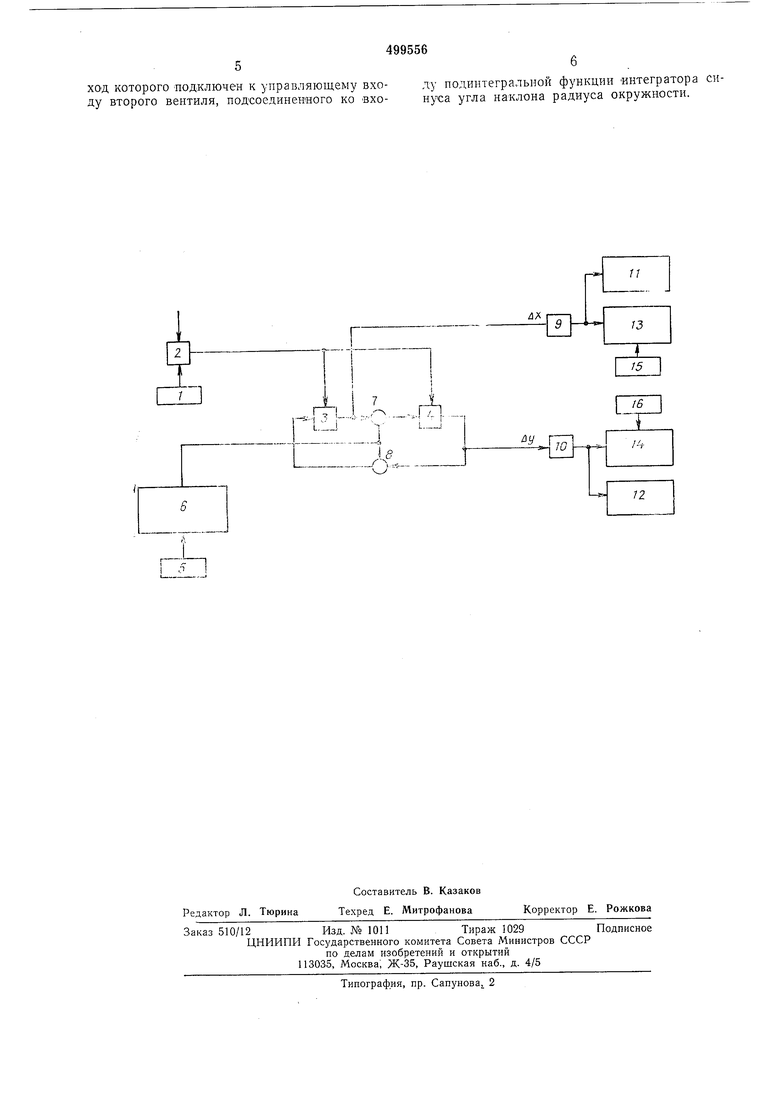
подинтегральной функции интегратора косинуса угла наклона радиуса окружности, выход которого подключен к управляющему входу второго вентиля, подсоединенного ко входу подинтегральной функции интегратора синуса угла наклона радиуса окружности. Это позволяет ПОВЫСИТЬ точность и быстродействие работы интерполятора. На чертеже показана функциональная схетла о-писываемого интерполятора.
Она содержит регистр программируемой линейной скорости 1, интегратор линейной скорости 2, интеграторы синуса и косинуса угла наклона радиуса окружности 3 и 4, регистр программируемого радиуса 5, схему определения величины дискреты подинтегральных функций 6, вентили 7 и 8, накопители координатных приращений 9 и 10 схемы управления приводами 11 и 12, схемы окончания интерполирования 13 и 14 и регистры конечных значений координат 15 и 16. При непосредственном программировании линейной скорости (программируется не угловая скорость, а линейная), чтобы обеспечить постоянство задания линейной скорости на малых радиусах, необходимо увеличивать угловую скорость обратно пропорционально радиусу. Если не увеличивать угловую скорость, т. е. обрабатывать дуги больщого и малого
круга с одинаковой угловой скоростью, то дуги различных радиусов и равных цеитральных углов будут отрабатываться за одинаковое время. При этом линейная скорость при движении по дуге малого круга окажется меньше, чем яри движении по дуге большего круга. В предлагаемой схеме увеличение угловой скорости при малых радиусах достигается увеличением цены дискреты т интеграторов 3 и 4. При этом объем Q интеграторов 3 и 4 берется равным максимально возможному программируемому радиусу R. Цена дискреты получается в предыдуш,ем кадре при помощи схемы 6 в соответствии с формулой . При отработке дуги максимального радиуса MaKc. Q, т - 1 время отработки заданной дуги определяется временем получения величин Asin(aK- Отг) иЛсоз(ак-an), соответствующих заданным конечным значениям Хк и УК (УК- конечное значение отрабатываемого центрального угла, «« - начальное значение). Очевидно, что при отработке дуг различных радиусов с одним центральным углом неличины Дз1п(ак-«п) и Асоз(ак-(in) одинаковы. При неизменной частоте на входе интерполятора увеличить угловую частоту можно, увеличивая дискрету интерполятора обратно пропорционально радиусу , где Ri - любой возможный запрограммированный радиус. При этом время отработки , где Г - период частоты /вх. интерполятора, Ni - количество импульсов на входе интерполятора. При увеличении дискреты интерполятора в раз для отработки тех же значений Asin(aK-«п) и Асоз(ак-Кп) на входе интерполятора потребуется в - меньше импульсов. Следовательно, при одной и той же частоте /вх. время отработки t в уменьшается, что приведет к увеличению в то же число раз угловой скорости. Количество импульсов на выходе интерполятора при этом также в раз уменьшается, т. е. предлагаемая схема .позволяет сократить количество оборудования в известной схеме интерполятора, а именно в данной схеме не требуется умножителей smwt-R и coswt-R. Текушие значения приращений Ах и At/ получаются сразу на выходе интеграторов 3 и 4. Действительно, если при отработке дуги с R RMaKu. на выходе интеграторов 3 и 4 было выдано Ni и N2 импульсов, то при отработке дуги радиуса Ri на выходы интеграторов 3 и 4 будет выдано в раз меньшее NiRi NsRi количество импульсов ит. е. при макс макс указанном значении дискреты интеграторы 3 и 4, помимо функции вычисления sin wt и cos wt, выполняют также функцию умножения на радиус гВ кадре, предшествующем кадру, в котором данная дуга отрабатывается, величина радиуса R с выхода регистра 5 поступает на вход схемы 6. Схема 6 определяет величину дискреты т интеграторов 3 и 4 в соответствии с формулой . В кадре, в котором отраRбатывается данная дуга, величина дискреты т в виде числа поступает на кодовый вход вентилей 7 и 8, на управляющие входы которых приходит сигнал переполнения регистровнакопителей интеграторов 3 и 4. При наличии импульса переполнения на выходе интегратора 3 (4) содержимое регистра подинтегральной функции интегратора 4 (3) изменяется на величину т. Скорость суммирования подинтегральяой функции интеграторов 3 и 4 определяется частотой, которая получается на выходе интегратора 2 в результате интегрирования величины линейной скорости v. Импульсы текущих приращений Ах и Аг/ поступают на входы накопителей 9 и 10, где накапливаются текущие значения х п у. Текущие приращения х и у поступают в схему управления приводом, а также в схему окончания интерполирования но координате, где величина х (у) сравнивается с конечным запрограммированным значением прирашения по координате, которое хранится в регистре 15 (16). Формула изобретения Круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, ко входу подинтегральной функции которого подключен выход регистра программируемой линейной скорости, а выход соединен со входами независимой переменной интеграторов синуса и косинуса угла наклона радиуса окружности, выходы которых через накопителн координатных приращений подключены к соответствующим схемам управления приводами и схемам окончания интерполирования, соединенным с регистрами конечных значений координат, а также регистр программируемого радиуса, отличающийся тем, что, с целью повышения точности и быстродействия работы интерполятора, он содержит схему определения величины дискреты подинтегральных функций и два вентиля, причем кодовые входы вентилей соединены с выходами схемы определения величины дискреты подинтегральных функций, ко входу которой подключен регистр нрограммируемого радиуса, управляющий вход первого вентиля соединен с выходом интегратора синуса угла наклона адиуса окружности, а выход-со входом одинтегральной функции интегратора косиуса угла наклона радиуса окружности, выход которого подключен к управляющему входу второго вентиля, подсоединеиного ко входу подинтегральной функции интегратора синуса угла наклона радиуса окружности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU484502A1 |
| ГЕНЕРАТОР ДУГ ОКРУЖНОСТЕЙ | 1973 |
|
SU397902A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| ИМПУЛЬСНЫЙ ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1970 |
|
SU260973A1 |
| Устройство для отображения дуг окружностей на экране электронно-лучевой трубки | 1984 |
|
SU1280436A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
| Генератор развертки | 1975 |
|
SU585461A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU807236A1 |
| Интерполятор | 1978 |
|
SU813365A1 |
