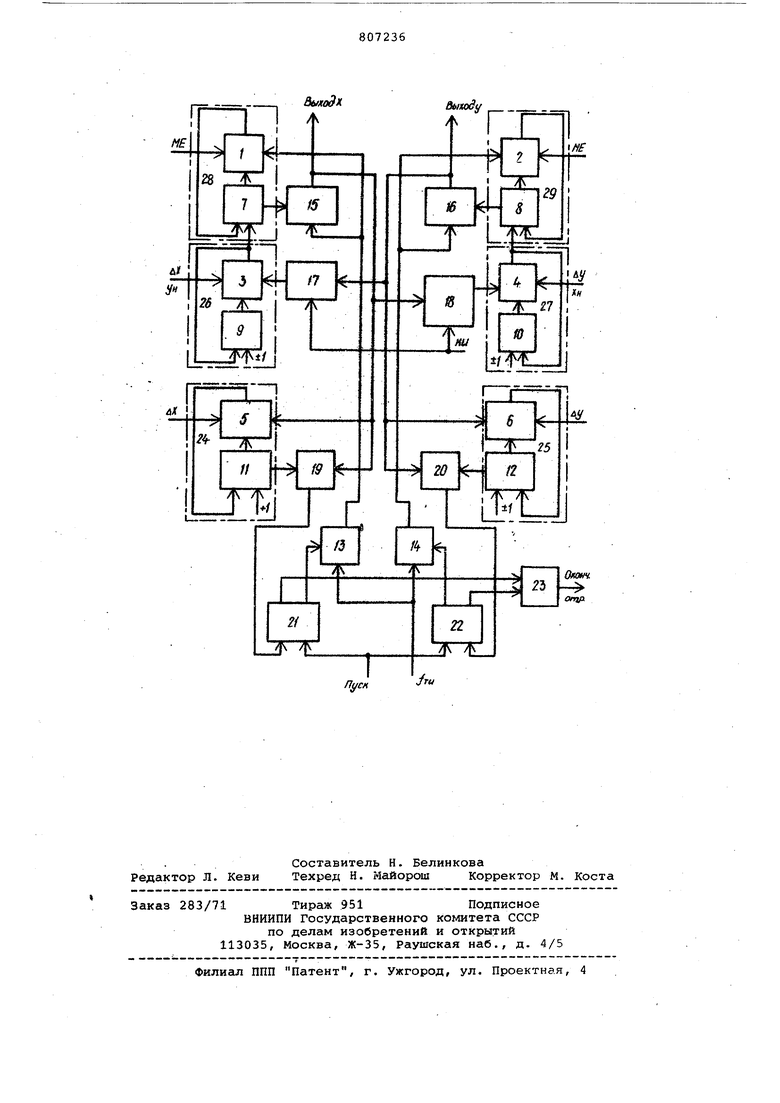
Изобретение относится к автомати-; ке и вычислительной технике и может быть использовано в различных системах програкмного управления и управляющих машин. Известен -линейно-круговой интерпо лятор, построенный на основе двух цифровых дифференциальных анализаторов (ЦДЛ), каждай из которых состоит из реверсивного счетчика подынтегральной функции накапливающего сумматора, ключей переноса и элемента задержки l . Недостатком такого интерполятора является необходимость использовать два такта: один для суммирования зна чения подынтегральной функции с накопленной величиной интеграла, второ для корректировки значения подынтегральной функции, что вдвое снижает мавГсимальную частоту круговой ин ге15поляции, что особенно вредно в случа использования интерполятора в устрой стве предварительного расчета данных например, для коррекции эквидистанты или фрезирования винтовой линии. Наиболее близким по технической сущности к предлагаемому является ин терполятор , состоящий из последовательно соединенных реверсивных счет- чиков, блокой ключей и накапливающих сумматоров, выходы пераполнення. которых связаны с входом реверсивных счетчиков, элемента задержки и формирователя 2} . Недостатком такого интерполятораявляется низкое быстродействие. Цель изобретения - повьшениэ быстродействия интерполятора. Указанная цель достигается -гем, что линейно-круговой интерполятор, содержащий первый элемент Низ каждой координате интерполирования второй элемент И, первый блок сумглирования, выход которого соединен с первым входом третьего элемента- И, и последовательно соединенные четвертый элемент И, второй блок суммярования, третий блок суммирования и пятый элемент И, выход которого подключен к выходу интерполятора и к второму входу третьего элемента И данной координа .ы интерполирования, в кахсдую координату интерполирования введен триггер, а первый, второй и третий блоки суммирования каикдой координаты интерполирования выполнены в виде последовательно соединенных первого комбинационного сумматора и первого регистра на j-K триггерах. второго комбинационного сумматора и второго регистра на J-K триггерах, а также третьего комбинационного сум матора и третьего регистра на J-K триггерах, причем в каждой координате интерполирования первый вход триг гера подключен к запускакйцему входу интерполятора, второй вход - к выход третьего элемента И данной координаты интерполирования, первый выход к входу первого элемента И, а второй выход - к первому входу второго элемента И данной координаты интерполирования, второй вход которого соединен с тактирующим входом интер полятора, а выход - с вторым входом третьего регистра на J-K триггерах, и с вторым входом пятого элемента И данной координаты интерполирования, подключенного выходом к первому входу четвертого элемента И другой координаты интерполирования и к втором входу первого регистра на J-K триггерах данной координаты интерполирования, второй вход четвертого элемен та И каждой координаты интерполирования соединен с управлянхцим входом интерполятора, а выход первого, второго и третьего регистров на j-K триг герах соединены с соответствуняцими входами первого, второго и третьего комбинационных сумматоров данной координаты интерполирования соответственно. На чертеже представлена функциональная схема предлагаемого интерполятора. Интерполятор состоит из третьих 1 и 2, вторых 3 и 4 и первых 5 и 6 регистров на j-K триггерах, работающих по заднему фронту импульсов синхронизации, третьих 7 и 8, вторых 9 и 10, первых 11 и 12 комбинационных сумматоров, вторых 13 и 14, пятых 15 и 16, четвертых 17 и 18j трет их 19 и 20 элементов и, триггеров 21 и 22, первого элемента И 23, а такхке первых 24 и 25, вторьиг 26 и 27 и третьих 28 и 29 блоков суммирования. Интерполятор может работать в дву ОСНО2НЧХ режимах: в режиме линейной и в режиме круговой интерполяции. В режиме линейной интерполяции интерполятор работает следукм йм образом. В регистры 1 и 2 заносится маилинная единица ME. Величина лх заноситс в регистра 3 и 5, а величина Ду в ре гистры 4 и 6. Потенциал режима круго вой интерполяции КИ отсутствует, поэтому элементы И 17 и 18 закрыты. По сигналу пуск триггеры 21 и 22 устанавливаются в единичное состояние и открывают элементы И 13 и 14, в результате чего импульсы тактовой частоты начинают проходить через элементы И 13 и 14 и поступают на входы элементов И 15 и 16, которые управляются сигналами переноса сумматоров 7 и 8. В этот момент на выходе сумматора 7 стоит сумма машинной единицы (ME), т.е. величины 10000... О и дх, а на выходе сумматора 8 сумма ME и ду. Если эта сумма не создает сигнала переполнения, то элементы И 15 и 16 закры1ТЫ и по заднему фронту импульса частоты {... указанные суммы заносятся в регистры 1 и 2, так как они построены на j-K триггерах, работающих от заднего фронта синхроимпульсов. К приходу следующего импульса величины, хранимые в регистрах 1 и 2, и величины ДX и ду образуют новые суммы на выходах сумматоров 7 и 8. Пусть при этом возникает переполнение сумматора 7. Тогда элемент И 15 открыт, и импульс f, проходит на выход интерполятора по координате X и одновременно на вход сигнала синхронизации регистра 5 и элемента И 19. В результате чего сумма Дх + 1 (дх в дополнительном коде) записывается з регистр 5 по заднему фронту. Если на выходе сумматора был при этом .сигнал перенос, это означает, что число импульсов, отработанных по координате X, равно дх, то элемент И 19 открыт, и с его выхода поступает на нулевой вход триггера 21 и устанавливает его в нуль. При этом закрывается элемент И 13. Аналогично работает канал координаты у и, когда отработка перемещения по у заканчивается, устанавливается в нуль триггер 22, элемент И 14 закрывается, а на выходе элемента И 23 формируется сигнал окончание отработки кадра . Поскольку изменение состояния регистров происходит нсГ заднем фронте синхроимпульсов, один и тот же импульс обеспечивает суммирование и подсчет величины отработанного перемещения лх и ду. В режиме круговой интерполяций информация заносится в устройство следующим образом: в регистры 1 и 2 заносятся машинные единицы, в регистр 3 величина , в регистр 4 величина дх R созч , в регистр 5 Дх Rcosif j - R созЧц, в регистр 6 величина ду Rs i п Ц - RsinЧц , где R - радиус интерполируемой окружности, Сц- начальный, а Ч| - конечный углы поворота радиуса вектора. В схему вводится потенциал режима круговой интерполяции КИ, который открывает элементы И 17 и 18. На вторые входы сумматоров 9 и 10 подаются ков зависимости от направления обхода дуги. Далее по сигналу пуск триггеры 21 и 22 устанавливаются в состояние единицы и открывают элементы И 13 и 14. При этом начинается работа интерполятора точно также, как описано выше в рэжиме интерполяции. с той лишь разницей, что выходные сигналы элементов И 15 и 16, проходя через элементы И 18 и 17, на синхронизирующие выходы регистров 4 и 3 со ответственно, обеспечивают по своему заднему фронту корректировку значеНИИ подынтегральных функций в регист ipax 3 и 4. При этом интерполятор попрежнему работает по рднотактнЬму циклу. Экономический эффект от использсзания данного изобретения возникает в результате того, что быстродействи интерполятора повышается в два раза Это позволяет сократить в два раза время проверки программы в ускоренно режиме, использовать интерполятор, работающий на привод, также для расчета поправок при коррекции эквидистанты при смене кадра до величины 1У S- , где f. - частота интег ft -Е- оVIf. рагора, 1„ - время ввода, о - цена импульса, что при i 0,001 с, S 0,01 мм дает величину 25 мм. Это значит, что при максимальной величине коррекции фрезы дЯ 25 мм, имеется возможность исключить из систем интерполятор расчета поправки, состоящий из двух интеграторов. Формула изобретения Линейно-круговой интерполятор, содержащий первый элемент И и в каж дой координате интерполирования вто рой элемент И, первый блок суммирования, выход которого соединен с первым входом третьего элемента И, и последовательно соединенные четвертый элемент И, второй блок суммирования, третий блок суммирования и пятый элемент И, выход которого подключен к выходу интерполятора и к второму входу третьего элемента И данной координаты интерполирования, отличающийся тем, что, с целью повышения быстродействия интерполятора, в каждую координату ин терполирования введен триггер, а первый, второй и третий блоки суммирования каждой координаты интерполирования выполнены в виде тоследовательно соединенных первого комбинационного сумматора и первого регистра на j-K триггерах, второго комбинационного сумматора и второго регистра на j-K триггерах, а также третьего комбинационного сумматора и третьего регистра на j-K триггерах, причем в каждой координате интерполирования первый вход триггера подключен к запускающему входу интерполятора, второй вход - к выходу третьего элемента И данной координаты интерполирования, первый выход - к входу первого элемента И, а второй выход к первому входу второго элемента И данной координаты интерполирования, второй вход которого соединен с тактирующим входом интерполятора, а выход - с вторым входом третьего регистра на j-K триггерах и с вторым входом пятого элемента И данной координаты интерполирования, подключенного выходом к первомувходу четвертого элемента И другой координаты интерполирования и к второму входу первого регистра.на j-K триггерах данной координаты -интерполирования, второй вход четвертого элемента И каждой координаты интерполирования соединен с управляющим входом интерполятора, а выход первого, второго и третьего регистров ria j-K триггерах соединены с соответствующими Входами первого, второго и третьего комбинационных сумматоров данной координаты интерполирования соответственно. Источники информации, принятые во внимание при экспертизе 1.Воронов А. А. и др. Цифровые аналоги для с истем автоматического управления. М.-Л., Академия на.ук, I960, с.120. 2.Там же, с. 136, рис. 64 (прототип) .
Jr.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для задания программы обработки в полярных координатах | 1987 |
|
SU1409974A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Линейно-круговой интерполятор | 1979 |
|
SU847279A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Круговой интерполятор | 1985 |
|
SU1359772A1 |
| Цифровой линейный интерполятор | 1986 |
|
SU1310779A1 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Линейно-круговой интерполятор | 1986 |
|
SU1312530A1 |
| Линейный интерполятор | 1985 |
|
SU1272310A1 |