(54) КРУГОВОЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU499556A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1302241A2 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Линейно-круговой интерполятор | 1982 |
|
SU1149218A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Круговой интерполятор | 1986 |
|
SU1352461A1 |
| Цифровой линейный интерполятор | 1977 |
|
SU682923A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU746431A1 |
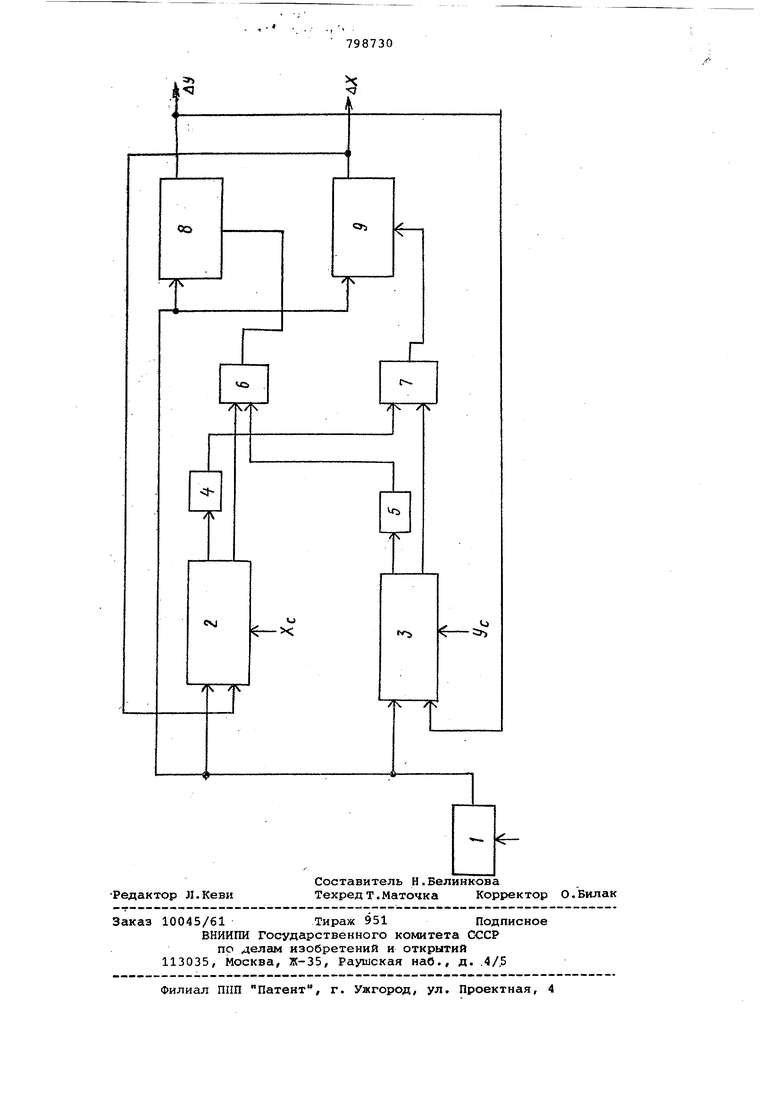
Изобретение относится к числовому программному управлению металлорежущими станками. .Известен круговой интерполятор дли контурных систем программного управления, содеркащий интегратор линейной скорости, регистр программируемой линейной скорости, интеграторы синуса и косинуса угла наклона радиуса окружности, накопители координатных приращений, схемы управления приводами, схеглы окончания интерполирования,, регистры конечных значений координат, регистр программируемого радиуса, схему формирования входной частоты, шифратор, схему определения приведенного радиуса и два вентиля. Интерполятор осуществляет вычисле ние координат обрабатываемого конту ра деталей с дугами различных радиу сов, причем диапазон изменения ради са разбивается на несколько ступене каждый из которых соответствует свой объем интеграторов. Изменение объемов интеграторов достигается пу тем изменения цены дискрет этих интеграторов l. Однако конструктивные особенност интерполятора позволяют использоват его в системах числового программного управления (ЧПУ) преимущественно для станков с малыгли скоростями подачи, так как скорость вычисления интерполятора ограничена, допустимой тактовой частотой. Увеличение скорости подачи станка требует повышения тактовой частоты интерполято- ра, поэтому точность вычислений на высоких тактовых частотах низкая, что ведет к недостаточной точности обработки деталей. Известен также круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, регистр программируемой линейной скорости, интеграторы синуса и косинуса угла наклона радиуса окружности, накопители координатных приращений, блоки управления приводами, блоки окончания интерполирования, регистры конечных значений координа регистр программируемого радиуса, блок определения величины дискреты подинтегральных функций и два вентиля. В таком интерполяторе при обработке деталей, имекяцих дуги различных оадиусов, обеспечивается пост.ояаство задания линейной скорости обработки. Для этого увеличивают угловую скорость перемещения обрабатывагадего инструмента обратно пропорционально радиусу, что достигается увеличением цены дискреты интеграторов синуса и косинуса угла наклона радиуса окружности. Ввиду этого тактовая частота на выходе интерполятора неизменна и в результате сокращается время Обработки контура обрабатываемой детали 2 . Однако конструктивные особенности этого интерполятора позволяют исполь зовать его в системах числового программного управления только для станков а. малыми скоростями подачи. Скорость вычисления координат отрабатьюаемого контура также ограничена допустимой тактовой частотой интерполятора. Обработка деталей на малых скоростях подачи ухудшает технологичность и производительность обработки, а повышение скоростей подачи приводит к необходимости увеличения тактовой частоты интерполятора, что снижает точность вычисления, и следо вательно, не обеспечивает требуемой точности обработки деталей. Наиболее б шзким по технической сущности к предлагаемому является круговой интерполятор, осуществляющий вычисление координат обрабатывае мого контура при высоких скоростях подачи станка, содержащий интегратор координаты X, интегратор координаты У и интегратор угловой скорости,выход которого соединен с первым входом каждого из упомянутых интеграто- ров. Второй вход интегратора координаты X соединен с выходом интегратора координс4,ты У, а второй вход интег ратора координаты У - с выходом интегратора координаты X. Интерполятор работает по принципу накапливающего сумматора. В качестве приращений используется величина при ращений центрального угла дуги обрабатываемого контура. Приращения выражаются многоразрядными числами. Ша интерполяции, пропорциональный заданной линейной скорости, выбирается более величины дискреты, ввиду чего вычисления координат в интерполяторе происходит при больших скоростях подачи станка на постоянной минималь ной частоте (100... 2.0 Гц), определяе мой следящим приводом станка З. Однако такой интерполятор в силу своих конструктивных особенностей не может обеспечить требуемой точности вычислений координат обрабатываемого контура. Погрешность интегри рования в интерполяторе значительная точность интерполирования недостаточ ная, а следовательно, данный интерполятор не обеспечивает требуемой точности обработки деталей, Цель изобретения - повышение точнйсти интерполятора. Поставленная цель достигается тем, что круговой интерполятор, содержащий первый интегратор и в каждой координате интерполирования второй интегратор, первый вход которого соединен с выходом первого интерполятора, в каждую координату интерполирования введены делитель, сумматор и третий интегратор, первый вход которого соединен с выходом сумматора, второй вход - с выходом первого интегратора, а первый и второй выходы второго интегратора - соответственно с входом делителя и с первым входом сумматора данной координаты интерполирования, причем :ыход делителя и выход третьего ин/ гратора каходой координаты интерполирования подключены к второму входу сумматора и второму входу второго интегратора соответствующей координаты интерполирования. На чертеже схематически представлено предлагаемое устройство. Устройство содержит первый интегратор 1, вторые интеграторы 2 и 3, делители 4 и 5, сумматоры 6 и 7, третьи интеграторы 8 и 9. Устройство работает следующим образом. В исходном состоянии в регистр подинтегральной функции интегратора 1 вводится величина угловой скорости, а в регистры подинтегральных функций интеграторов 2 и 3 - соответственно координаты начальной точки дуги окружности XQ и УС,. Аргументом при интегрировании скорости является время t. Приращения аргумента ut представляют собой единичные импульсы, следующие с постоянной тактовой частотой f. Интегрирование производят по центральному углу дуги cLИнтегратором 1 вырабатываются приращения центрального угла дуги Ло( . Сигнал, соответствунндий значению t.dL, поступает на входы интеграторов 2, 3, 8 и 9 в качестве независимой переменной. В результате интегрирования на выходе интеграторов 2 на каждом шаге i получают приращение текущей координаты Af , а на выходе интегратора .3 - приращение текущей координаты лХ. После деления на два на первый вход сумматора 6 поступает сигнал, соответствующий л., а на первый вход сумматора 7 - сигнал, соответствующий &.12. Па вторые входы сумматоров 6 и 7 поступают сигналы, соответствуквдие содержимому регистров подинтегральных функций интеграторов 2 и 3: на вход сумматора 6 - , на вход сумматора 7 . После сложения на выходе суюлатора 6 получают величину(х, © ) а на выходе сумматора 7 - величину (Y--® -j) которые записываются в регистр подинтегральных функций соответственно интеграторов 8 и 9. С выходов интеграторов 8 и 9 многоразрядные приращения лХ и АУ поступают на входы накопительных регистров интеграторов 2 и 3 соответственно. С приходом на вход интегратора 1 следующего импульса с частотой цикл вычислений повторяется. Погрешность вычисления в предлага емом интерполяторе уменьшена по срав нению с известным при условии равенства скорости подачи и радиуса обрабатываемой дуги. Уменьшение погрешности интегрирования повышает точность интерполирования не менее, чем на порядок, ввиду чего повышается точность обработки деталей на станках, испольэуквдих систему числового программного управ ления с предлагаемым круговым интерполятором . Формула изобретения .Круговой интерполятор, содержащий первый интегратор и в казкдой координате интерполирования второй интегратор, первый вход которого соединен с выходом первого интегратора, отличающийся тем, что, с целью повышения точности интерполятора, в каждую координату интерполирования введены делитель, сумматор и третий интегратор, первый вход которого соединен с выходом сумматора, второй вход - с выходом первого интегратора, а первый и второй выходы второго интегратора - соответственно с входом делителя и с первым входом сумматора данной координаты интерполирования, причем выход делителя и выход третьего интегратора каящой координа ты интерполирования подключены к второглу входу сумматора и BTopcwiy вхо- ду второго интегратора соответству эс1ей координаты интерполирования. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №484502, кл. G 05 В 19/18. 1974. 2,Авторское свидетельство СССР №499566, кл. G 05 В 19/18, 1974. .. -г--( 3 .Сб.Станки с числовым программным управлением, участки и автоматические линии на их основе. М. , Машиностроение, 1974,- с.98 - (прототип) .
э
СО
/
/ч
VJ
«м
VO
г
f
/
