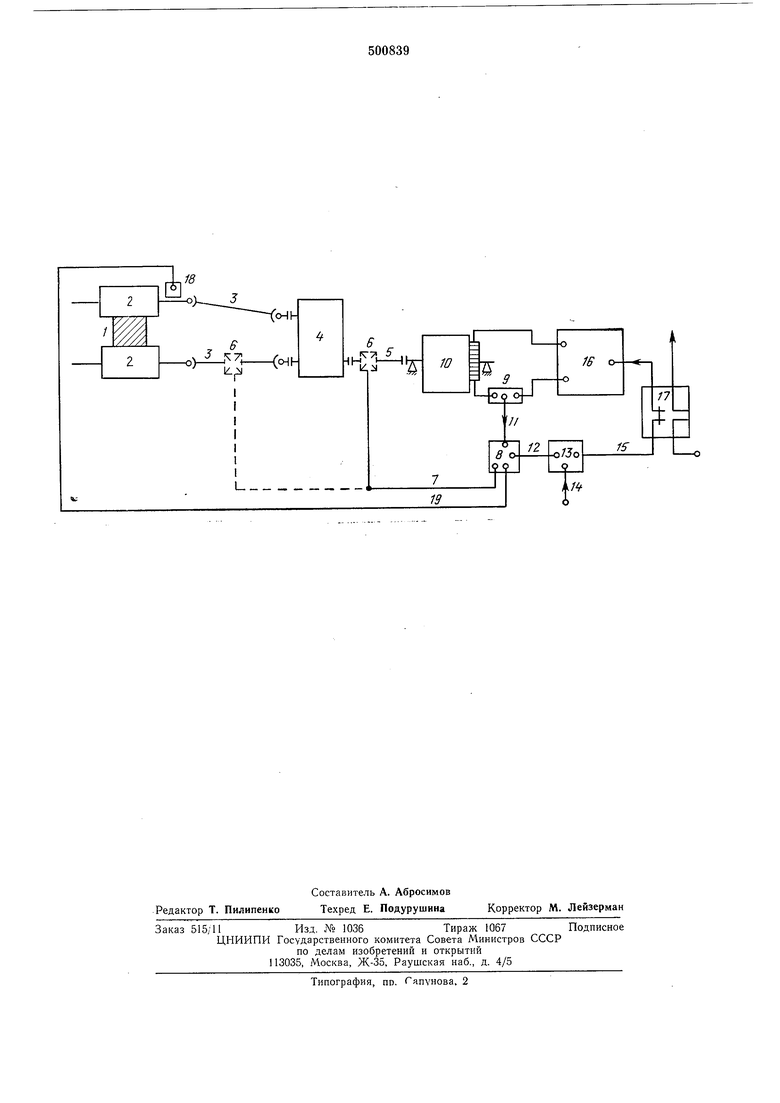
По основному авт. св. № 389856 известен способ автоматического управления приводным электродвигателем прокатного стана. По этому способу измеряют механическую нагрузку во вращающихся частях линии клети, сравнивают со значением нагрузки, измеренной на электродвигателе, а полученную разность значений сравнивают с заданным значением и при рассогласовании подают управляющий сигнал в систему управления электродвигателем. Однако по такому способу при нарушении условий захвата в режимах разгона, сопровождающегося значительными динамическими токами прокатного электродвигателя, и недостаточной четкости измерения нагрузки самого электродвигателя, а также из-за запаздывания работы датчика пробуксовки надежность действия способа в указанных режимах может понизиться. Целью изобретения является повышение надежности защиты элементов линии стана и электродвигателя от механических поломок. Это достигается тем, что механическую нагрузку во вращающихся частях дополнительно сравнивают с давлением металла на валки, а полученную разность значений сравнивают с заданным значением и при рассогласовании подают управляющий сигнал в систему управления электродвигателя. На чертеже приведена принципиальная электрическая схема устройства для осуществления предлагаемого способа. При прокатке заготовки 1 в валках 2, сочлененных через щпиндели 3 и шестеренную клеть 4 с соединительным валом 5, соответствующий механический момент фиксируется посредством торсиометра 6. Сигнал 7 с выхода торсиометра 6 поступает на один из входов блока 8 сравнения сигналов. На второй вход этого блока -с датчика 9 тока прокатного электродвигателя 10 поступает выходной сигнал 11. Этот сигнал пропорционален моменту двигателя (при постоянном потоке возбуждения). Выходной сигнал 12 блока 8 сравления поступает на в.ход эталонного опорного блока 13, куда поступает сигнал 14 задатчика установки этого блока. Выходной сигнал 15 эталонного опорного блока 13 поступает на вход регулируемого источника питания и системы 16 управления приводного прокатного электродвигателя 10 через контакты датчика 17 пробуксовки слитка. На третий вход блока сравнения 8 сигналов поступает от мессдозы 18 также выходной сигнал 19.
3
При нормальной работе стана, когда нагрузка прокатного электродвигателя 10 соответствует нагрузке, фиксируемой торсиометром 6, разница сигналов 7 и 19 отсутствует, и на выходе блока 8 сравнения напряжение равно нулю. Поэтому равен нулю и выходной сигнал 15 блока 13.
При возникновении резонансных явлений в линии клети, например, при буксовке, возникающей из-за нарушений режима захвата, сигнал 7 торсиометра 6 становится больше выходных сигналов 11 и 19 соответственно датчика 9 тока и мессдозы 18. При этом на выходе блока 8 сравнения возникает сигнал. Изменение выходного сигнал 19 мессдозы 18 появляется с упреждением по сравнению с изменением сигнала 11 датчика 9 тока поскольку при нарушении условий захвата сперва происходит уменьшение давления металла на валки, а затем уже, как следствие, происходит уменьшение токовой нагрузки электродвигателя 10 с запаздыванием из-за наличия электромагнитной инерциоиности якорной цепи, запаса живых сил и т. д.
Когда величина сигнала на выходе блока 8 сравнения начинает превалировать над сигналом 14, определяемой задатчиком установки эталонного опорного блока 13, то возникает ВЫХОД1ЮЙ сигнал 15 этого блока.
Если причиной возникновения резонансных явлений и появления сигнала на выходе эталонного блока 13 является пробуксовка, возникающая из-за нарушения режима захвата, то при этом должен срабатывать датчик 17 пробуксовки, который не пропустит выходной сигнал эталонного блока 13 на вход системы 16 управления нсто ;:;п:а питания и начнет воздействовать, «ап;,мс; нл отключение прокатного электродвигателя 10.
Если же B03HHKHOiiie;i ;c резонансных явлений в кинематической линии клети обусловлено другими причинами, то датчик пробуксовки не срабатывает, и выходной сигнал эталонного блока 13 воздействует на источник пита«ия, например, на снижение скорости прокатного двигателя 10.
Таким образом, осуществляется селективность защитного воздействия при работе рассматриваемой схемы.
Однако при захвате, осуществляемом обычно в разгона со значительным динамическим током прокатного электродвигателя, разность между сигналом 7 торсиометра 6 и сигналом 11 датчика 9 статического тока из-за нечеткого срабатывания датчика 9 статического тока и большого динамического тока электродвигателя 10 может оказаться недостаточной для появления выходного сигнала эталонного -блока 13.
Наличие же мессдозы 18 и ее выходного сигнала 19, также сравниваемого с выходным сигиалом 7 торсиометра 6, обеспечивает появление упреждающего сигнала 15 и его прохождение на источник питания электродвигателя при возможном отказе датчика 9 статического тока.
Если из полного тока прокатного электродвигателя 10 надежно вычитается дниамиче10 екая составляющая тока, то выходной ситнал 19 мессдозы 18 появляется с упреждением и обеспечивает форсированное прохождение сигнала 15 на источник питання для необходимого воздействия на нрокатный электродвигатель еще до срабатывания датчика 17 пробуксовки, который также работает с задержкой во времени по срава1ению с ситналом мессдозы, поскольку, как правило, управляющим параметром для датчика пробуксовки являет0 ся ток прокатного электродвигателя.
Ограничиться только лищь наличием месс. дозы 18 н исключить датчик 9 тока нельзя, так как при возникновении электромеханических резонансных явлений, в случае нахождения слитка в валках, давление металла на валки практически не уменьщается.
При «арущении условий захвата и уменьшенни давления металла на валки сигнал 12 на выходе блока 8 сравнения возникает при появлении упреждающего действия уменьщающегося сигнала 19 мессдозы 18, несмотря на то, что в первый момент времени сигнал 11 с выхода датчика 9 статического тока еще не уменьшился.
5 В дальнейшем схема может работать как при совместном действии сигналов 11 и 19, так и нри действии только сигнала 19.
Элементы, входящие в блок 8 и обеснечивающие указанное независимое действие сиг0 налов 11 и 19, на чертеже не показаны.
Кроме того, торсиометр 6 может быть установлен также на шпинделе 3, а также несколько торсиометрОБ могут быть установлены в различных местах кинематической линии
5 клети.
Формула изобретения
Способ автоматического управления приводным электродвигателем прокатного стана по
0 авт. св. № 389856, отличающийся тем, что, с целью повыщения надежности защиты элементов линии стана и электродвигателя от механических поломок, механическую нагрузку во вращающихся частях дополнительно
сравнивают с давлением металла на валки, а полученную разность значений сравнивают с заданным значением н при рассогласовании подают управляющий сигнал в систему управления электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИВОДНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРОКАТНОГО СТАНА | 1973 |
|
SU389856A1 |
| Бесконтактное устройство для фиксации моментов захвата и выброса слитка из валков прокатного стана | 1976 |
|
SU698690A1 |
| Способ уменьшения ударов в кинематической линии клети прокатного стана и устройство для его осуществления | 1980 |
|
SU933146A1 |
| Устройство для согласования скорости валков и рольгангов реверсивного стана | 1981 |
|
SU955478A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ МОМЕНТОВ НА РАБОЧИХ ВАЛКАХ ПРОКАТНОЙ КЛЕТИ С ИНДИВИДУАЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2362641C2 |
| Устройство управления реверсивной клетью кварто | 1981 |
|
SU1024132A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРОКАТКИ В НЕПРЕРЫВНОЙ ГРУППЕ КЛЕТЕЙ | 2011 |
|
RU2477187C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В ЧЕРНОВОЙ ГРУППЕ КЛЕТЕЙ НЕПРЕРЫВНОГО ПРОКАТНОГО СТАНА | 2012 |
|
RU2494828C1 |
| СПОСОБ ЗАДАНИЯ СКОРОСТНОГО РЕЖИМА НЕПРЕРЫВНОЙ ГРУППЫ ПРОКАТНЫХ КЛЕТЕЙ СТАНА ГОРЯЧЕЙ ПРОКАТКИ МЕТАЛЛА С ОБЕСПЕЧЕНИЕМ МИНИМАЛЬНОГО НАТЯЖЕНИЯ В МЕЖКЛЕТЕВЫХ ПРОМЕЖУТКАХ | 2002 |
|
RU2198753C1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |