1
Известен способ автоматического унравления приводиьш электродвигателем прокатного стана воздействием на электродвигатель по сигналу отключения значения фактической нагрузки, замеренной на электродвигателе, от заданного значения.
Однако из-за наличия упругих механических связей между электродвигателем и валками (соединительные валы, шпиндели и т. д.) и механических люфтов, например, в шпиндельных соединениях, а также -из-за влияния в некоторых случаях неравномерности хода шпинделей в указанных связях и в элементах конструкции самих электродвигателей возникают большие механические нагрузки, значительно превосходящие нагрузки при прокатке и обжатии металла и приводящие к механическим поломкам механического оборудования и самого электродвигателя.
Поэтому величина тока якоря не всегда характеризует механическую нагрузку, крутящий момент в этих слзчаях на валу почти не зависит от электрических параметров двигателя, а целиком определяется жесткостью вала, маховой массой слитка и Скоростью захвата.
Недостатком известных способов является то, что измерение нагрузки на самом электродвигателе не характеризует действительно возникающих механических нагрузок.
Цель изобретения - повышение надежности работы электропривода и уменьщение поломок элементов линии клети и приводного электродвигателя, преимущественно реверсивного обжимного прокатного стаиа, при возиикиовении электромеханических резонансных явлений.
Цель достигается тем, что измеряют механическую нагрузку во вращающихся частях линии клети, сравиивают со значением нагрузки, измеренной на электродвигателе, а полученную разность значений сравнивают с заданным значением и нри рассогласовании подают управляющий сигнал в систему управления электродвигателя.
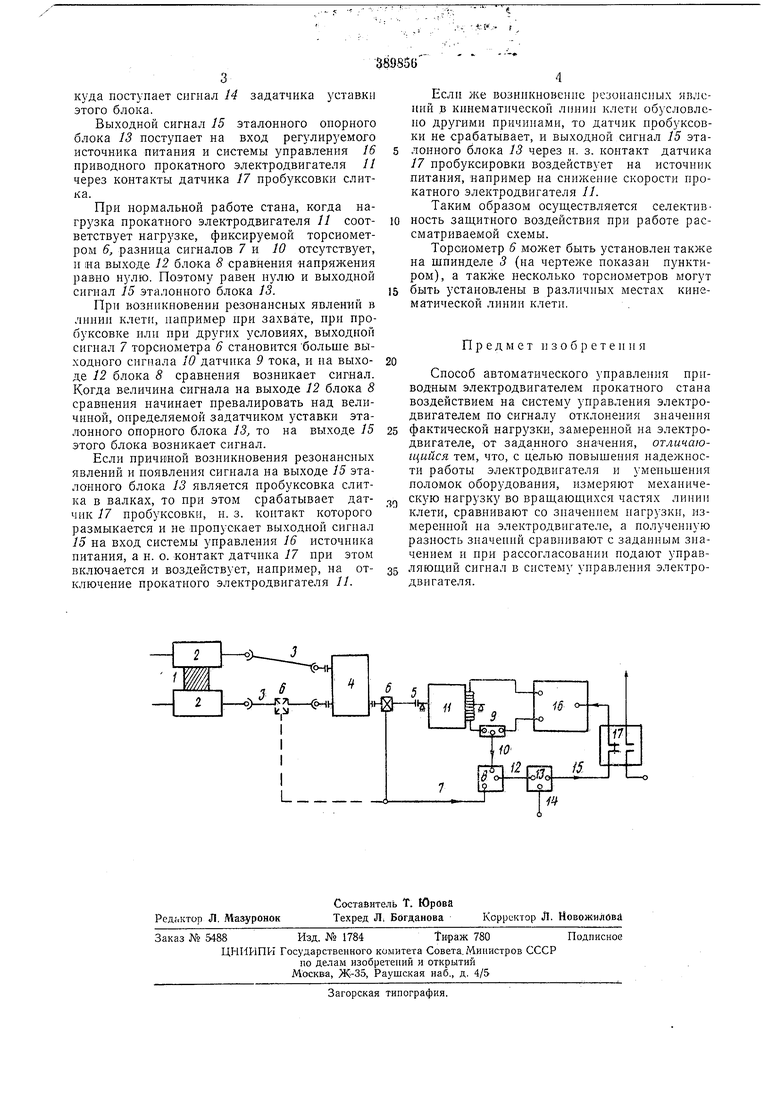
На чертелсе нредставлен один из возможных примеров реализации данного способа.
При прокатке заготовки / в валках 2, сочлененных через шпиндели 3 и шестеренную клеть 4 с соединительным валом 5, соответствующий механический момент фиксируется посредством торсиометра 6. Выход 7 торсиометра 6 поступает на один из выходов блока 8 сравнения сигналов. На второй вход этого блока поступает выходной сигнал 10 датчика 9
тока прокатного электродвигателя 11. Этот сигнал пропорционален моменту двигателя (при постоянном потоке возбзждения).
Выходной сигнал 12 блока 8 сравнения пеступает на вход эталонного опорного блока 13,
куда поступает снгпал 14 задатчика уставки этого блока.
Выходной сигнал 15 эталонного опорного блока 13 поступает на вход регулируемого источника питания и системы управления 16 приводного прокатного электродвигателя // через контакты датчика 17 пробуксовки слитка.
При нормальной работе стана, когда нагрузка прокатного электродвигателя 11 соответствует нагрузке, фиксируемой торсиометром 6, разница сигналов 7 и 10 отсутствует, и иа выходе 12 бло«а 8 сравнения напряжения равно нулю. Поэтому равен нулю и выходной сигнал 15 эталонного блока 13.
При возникновении резонансных явлений в линии клети, например при захвате, при пробуксовке или при других условиях, выходной сигнал 7 торсиометра 6 становится больше выходного сигнала 10 датчика 9 тока, и на выходе 12 блока 8 сравнения возникает сигнал. Когда величина сигнала на выходе 12 блока 8 сравнения начинает превалировать над величиной, определяемой задатчиком уставки эталонного опорного блока 13, то на выходе 15 этого блока возникает сигнал.
Если причиной возникновения резонансных явлений и появления сигнала на выходе 15 эталонного блока 13 является пробуксовка слитка в валках, то при этом срабатывает датчик 17 пробуксовки, и. 3. контакт которого размыкается и не пропускает выходной сигнал 15 на вход системы управления 16 источника питания, а н. о. контакт датчика 17 при этом включается и воздействует, например, на отключение прокатного электродвигателя //.
Если же возникновение резонансных явлений в кинематической линии клети обусловлено другими причинами, то датчик пробуксовки не срабатывает, и выходной сигнал 15 эталонного блока 13 через н. з. контакт датчика 17 пробуксировки воздействует на источник питания, например на снижение скорости прокатного электродвигателя 11.
Таким образом осуществляется селективкость защитного воздействия при работе рассматриваемой схемы.
Тороиометр 6 может быть установлен также на шпинделе 3 (на чертеже показан пунктиром), а также несколько торсиометров могут быть установлены в различных местах кинематической линии клети.
Предмет и з о б р е т е и и я
Способ автоматического управления приводным электродвигателем прокатного стана воздействием на систему управления электродвигателем но сигналу отклонения значения фактической нагрузки, замереиной на электродвигателе, от заданного значения, отличающийся тем, что, с целью повышения надежности работы электродвигателя и уменьшения поломок оборудования, измеряют мехаиическую нагрузку во вращающихся частях линии клети, сравнивают со зиачением нагрузки, измеренной на электродвигателе, а полученную разность значений сравнивают с заданным зиачением и при рассогласовании подают управляющий сигнал в систему управления электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления приводным электродвигателем прокатного стана | 1974 |
|
SU500839A2 |
| Бесконтактное устройство для фиксации моментов захвата и выброса слитка из валков прокатного стана | 1976 |
|
SU698690A1 |
| Способ уменьшения ударов в кинематической линии клети прокатного стана и устройство для его осуществления | 1980 |
|
SU933146A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ МОМЕНТОВ НА РАБОЧИХ ВАЛКАХ ПРОКАТНОЙ КЛЕТИ С ИНДИВИДУАЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2362641C2 |
| Способ диагностического мониторинга упругого момента шпинделя толстолистового прокатного стана | 2024 |
|
RU2830788C1 |
| Способ мониторинга износа шпиндельного соединения клети толстолистового прокатного стана | 2024 |
|
RU2838333C1 |
| Устройство для уменьшения пробуксовок между рабочими и опорными валками листовых станов | 1980 |
|
SU937069A1 |
| Устройство управления реверсивной клетью кварто | 1981 |
|
SU1024132A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| Устройство автоматического контроля буксования валков обжимного прокатного стана с индивидуальным приводом валков | 1976 |
|
SU598670A1 |
1«
/
