1
Изобретение относится к оборудованию трикотажного производства, а именно к устройс-геу для управления многоси- стемной кругло вязальной машиной.
Известная машкна содержит игольницы, набранные вязальньтми иглами с иг- ловодами, и иглоперемешающее устройс-рво, выполненное в виде соосных цилиндрам колец, число которых соответствует числу игл в Одной петлеобразующей свете ме каждой игольницы. Привод попарно соединенных колец верхней и нижней игольниц машины выполнен в виде концентрических втулок, подвижно смонтированных на станине машины соосно игольницам,
жестко связаннь х со штоками в снабженных рлчагами, каждый из которых взам имодействует со штоком гидроцилиндра, являющегося исполнительным органом электрогидравлической следяшей системы устройства для управления машиной. Устройство для управления содержит программный меланизм и вентильную схему. Однако известное устройство не может обеспечит получение высокой точности траектории движения игл произвольной формы.
Предлагаемое устройство для программного управления следяшими системами иглоперемещаюших устройств многосистемной кругловязальной машиной позволяет воспроизводить любую заданную рабочую траекторию движения игл в процессе пет леобрааования с высокой точностью.
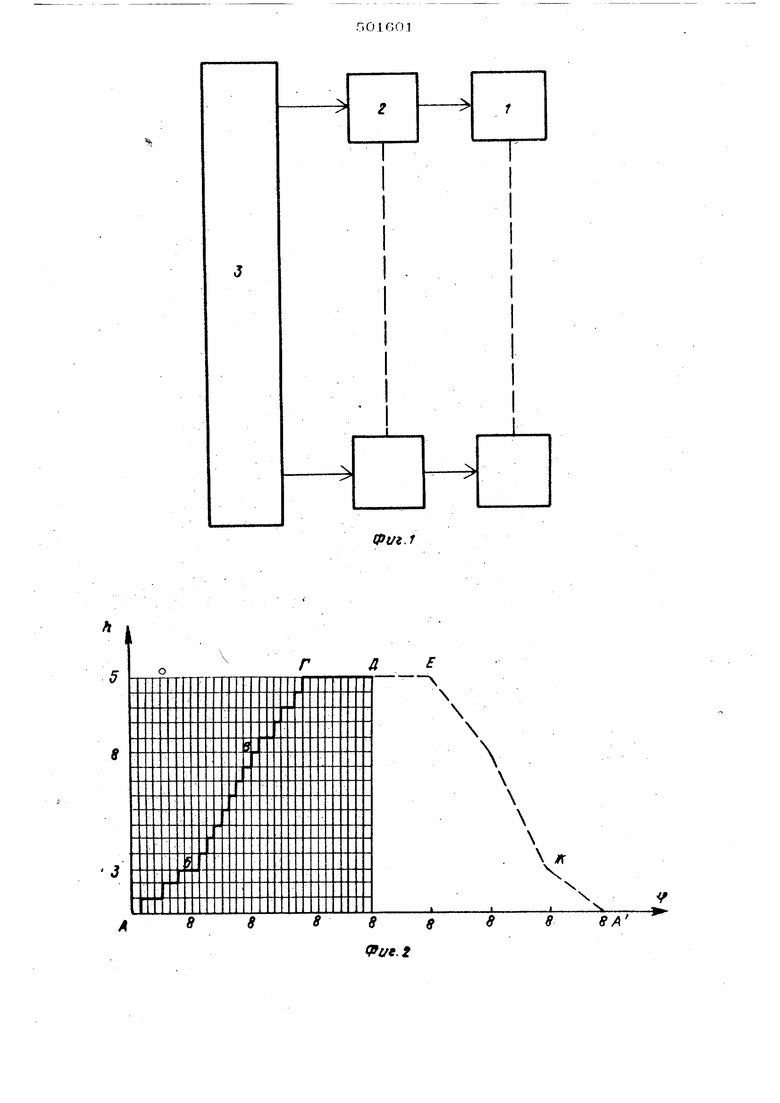
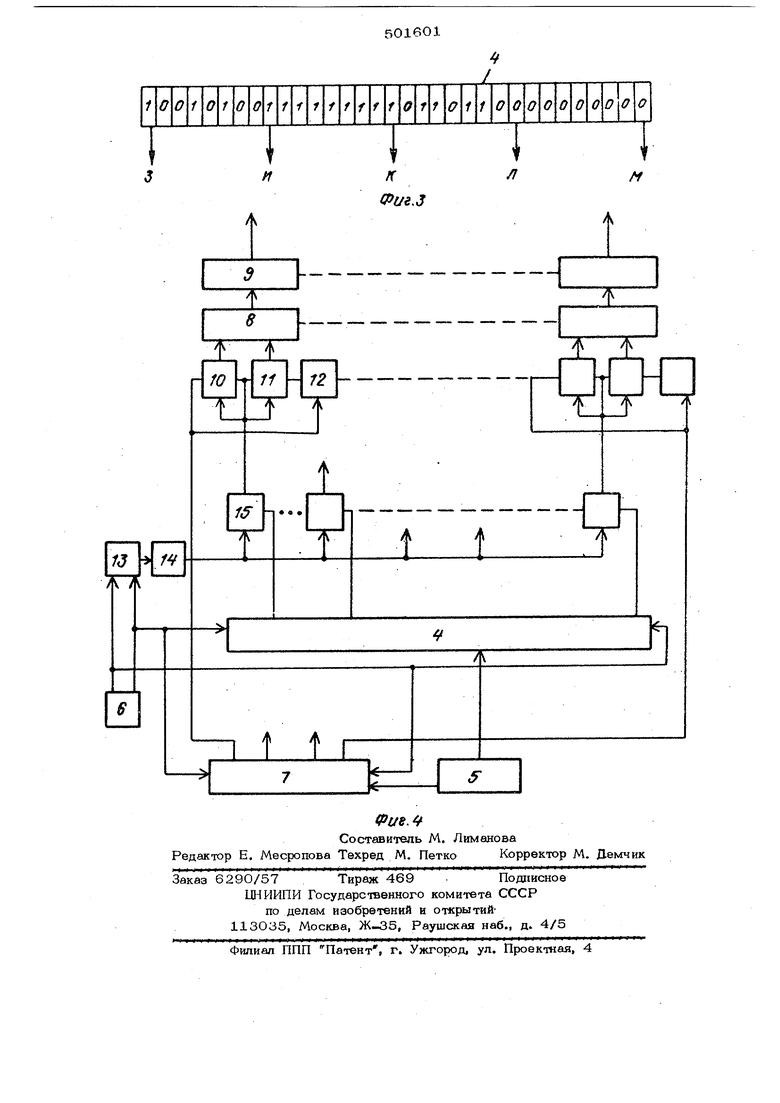
Зто достигается тем, что,, устройство снабжено дня управления каждой системой группой реверсивных счетчиков по числу иглоперемещаюших устройств. Каждый счетчик служит для записи числа, оцредеяяющего высоту подъема соответствуюшего иглоперемешаюшего устройства в данный момент времени. При применении цифровых следящих систем выходы реверсивных счетчиков непосредственно соединены с входами следящих систем. Если применены- аналоговые следящие системы, соединение выполнено через преобразователи код - напряжение. Входы реверсивных счетчиков через вентили реверса сое- динены с программным механизмом, сдвигаемым в ту или иную сторонуот датчика импульсов. JiafiKs. импульсов сюединен с регистром знака приращения, управляющим венздлями на входах реверсивных счетчиков. Кроме того, датчик импульсов через схему объединения и схему задержки соединен с вентилями избирания на вы ходах программного механизма. . .На фиг. 1 изображена блок-схема привода иглрперемещаюших устройств маши- аол{.на фиг. 2 - схема примера квантовой траектории движения игл; на г. 3 - программы прирашений для траектории движения игл, изображенной на фиг. 2; на фиг. 4 - блок.чхх.ема программного мехацизма. Многосистемная кругловязальная маши на содержит игольницу, набранную иглами и игловодамй, и нглойёремешаюшее устройство 1 по числу игл в одной системе (фиг. 1). Каждое из иглоперемешающих устройсте соединено с гидравлическим при водом электрогидравлической следящей системы 2. Входы следящих систем соединены с устройством 3 ддя управления, которое является дискре-тым, и информация о высоте подъема игл преобразуется в дискретную форму, что достигается путем квантования траектории движения игл А, Б, В, Г, Д, Е, Ж (фиг. 2). Лисло уровней квантования по высоте подъема игл определяется требуемой точностью Воспроизведения траектории. Число уровней квантования поворота нитеводителя находится следующим образом. На участке Б - В, где траектория имеет наибольшую крутизну, выбирают нагмень- Шую величину угла Лф, при повороте на который н1Й водителя игла поднимается на величину Ah J равную одному кванту. Затем подсчитывают количество ДЦ. уложенных на отрезке А-А. На заданную Траекторию движения ига наносят сетку линий, по вертикали отстоящих на ДН; по горизонтали - на ДЦ, и строят ломаную кривую, вершины которой находятся на пересечении сетки. Для составления программы прираше- НИИ для данной траектории переметаются по ломаной кривой дискретно на шаг, раввый по величине АЦ Если при очередном шаге произойдет приращение или убывание орданаты на ДЬ) то обознаяают это яв- ленив единидей (1), если значение ордв наты не меняется, то вносят обозначение ноль (О), Последователъдость обозна- чений О и , записанных в регистр. составляет программу выработки траектории в виде программы приращений (см. фиг. 3, где 3, И, К, Л, М -. выходы программного механизма). Программный механизм 4 (фиг. 4) с записью программы приращений выполнен в виде кольцевого регистра и в процессе работы имеет возможность реверсивного перемещения, необходимого для реверсивного направления вращения итюльниды при остановке мащинът из-за поломки игл. С помощью устройства 5 ввода, соединенного с программным механизмом, вводят программу. Датяик 6 импульсов, кинематически связанный с игольницей машины, синхронизирует управляющие сигналы с вращением игольницы и имеет два выхода. При развороте игольницы на угол Ли) на одном из выходов датчика импульсов, в зависимости от направления вращения кгольннцы,появляется импульсный сигнал сдвига программного механизма. Одновременно происходит сдвиг регистра 7 знака приращений, который тоже выполнен в виде кольцевого регистра, причем одна половина его ячеек имеет запись с цифрой О, а другая - с цифрой . Как программный механизм, так и регистр знака приращений имеют группу выходов по числу иглоперемещающих устройств. Регистр знака приращений служит для определения знака очередного приращения. При подъеме иглы очередные приращения суммируются, при опускании - вычитаются. Выходы программного механизма соединены с реверсивными счетчиками 8, на выходах которых находятся преобразователи 9 вдд-напряжение. Сигнал с последних поступает на входы следящих систем. На выходах (Летчиков 8 находятся вентили 10 и 11 суммирования и вычитания вентильной схемы, управляемые от регистра приращений. Вентиль 1О суммирования связан с регистром приращений непосредственно, а вентиль 11 вычитания - через инвертор 12. С помощью вентилей 10 и 11 переключают входа реверсивного счетчика либо на суммирование, либо на вычитание очередных приращений, полученных при сдвиге программного механизма, В связи с тем, что устройство явЛя- ется дискретным и меняет свое состояние после прихода очередного импульса с датчика импульсов, то для ылработки тактовых сигналов временной шкалы функционирования используют схему 13 объединения входов датчика, схе у 14 задержки и Вентили 15 набирания. Схема обьед нения связана с датчиком 6 импульсов и выход ее соединен сю схемой задержки. Выход схемы задержки соединен с импульсными входами вентилей 15 избира- НИН. Потенциальные входа вентилей изби ранив соединены с выходами программно го механизма, выходы вентилей набирания соединены с вентилями 10 и 11 на входах реверсивных счетчиков. Задержка, создаваемая схемой 14, должна быть большей времени переходных процессов в программном регистре и регистре приращений. Устройство работает следующим обра:аом. До включения привода машины произво дят ввод программы выработки траектории. При вк 1ючении привода машины и разворота нитеводителя относительно игл на угол дц) с выхода датчика импульсов поступит сигнал на программный механизм, регистр знака прирашений и схему объединения. После сдвига программн го механизма, регистра приращений и окончания переходных процессов со схемы задержки поступает импульсный сигнал tea импульсные входы вентилей набирания потенциальные входы которых соединены |с программным механизмом. В результа(те с вентилей избирания, на потенциаль- ньгх входах которых имелся сигнал 1, на входы вентилей 10 и 11 поступает импульсный сигнал. В зависимости от то того, какой из этих вентилей открыт, ВЕМ пупьсный сигнал поступит либо на вход суммирования реверсивных счетчиков, либо на вход вычитания. В результате в ряде реверсивных счетчиков прибавится сигнал 1, а в других соответственно этот сигнал вычитается, а в третьих - сохранится неизменным. Уровни напряжения на выходах преобразователей код - напряжение в ряде случаев меняются, в других остается не™ изменным. При вращении привода машины сигна:лы на входах следующих систем повторяют форму заданной траектории, а иглоперемещаюшие устройства, благодаря сдвигу по фазе, двигаются возвратио-лоступа- тельно с некоторым перекрвытием по времени. Формула изобретения Устройство дня управления многоси- Стемной кругловязальной машиной, содержащее следящие системы, программный механизм и вентильную схему, отличающееся тем, что, с целью обеспечения возможности получения произвольного вида траектории игл и повышения ее точэости, оно снабжено группой реверсивных счетчиков по числу иглоперемещаюшнх устройств , датчиком импульсов, регистром знака приращения, преобразователями код - напряжение, инвертором и схе- мой задержки, а вентильные схемы имеют вентиль суммирования, вентиль вычитания и вентиль избирвния, причем выходы реверсивных счетчиков через преобразователи код - напряжение соединены с входами следящих систем, входы через вентили реверса и вентили избирания соединены с программным механизмом, а датчик импульсов соединен с регистром знака приращений, программным механизмом и со схемой задержки, выход которой соединен с входами вентилей избирания, выходы которых соединены с входами вентилей реверса, одни 03 которых соединены непосредственно с регистром знака прираще- явй, а {зрутяе - через инверторы.
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления групповой трикотажно-вязальных машин | 1971 |
|
SU501602A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| КОМБИНИРОВАННАЯ ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА | 1966 |
|
SU224910A1 |
| В ПТБJ.j.t^ ./,',IV vr, J-Jwulb^^^i' I 'jt^ | 1973 |
|
SU370375A1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА С АВТОМАТИЧЕСКИМ ПРОГРАММИРОВАНИЕМ И МИКРОПРОГРАММНЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ | 1964 |
|
SU224161A1 |
| Устройство программного управления | 1984 |
|
SU1246055A1 |
jv
КS888е
Фиг.1
fftut. 2
n
J
I
Л
к CPi/e.3
fi
.
