1
Изобретение относится к технике автоматического вождения тракторных агрегатов на склонах.
Известны устройства автоматического вождения тракторного агрегата на склонах, содержащие датчики положения почвообрабатывающей машины и трактора, в которых для устранения подрезания растений рабочими органами почвообрабатывающей мащины сигнал датчика положения последней вызывает соответствующее смещение трактора.
Недостатком таких устройств является низкая точность вождения поперек склона при междурядной обработке из-за невозможности смещения нулевой линии малых защитных зон на обработку, а также повыщенный износ механизма поворота трактора.
Цель изобретения - повышение точности вождения и снижение частоты управляющих воздействий на механизм поворота трактора. Это достигается тем, что устройство снабжено тросом, закрепленным на почвообрабатывающей мащине и перекинутым через ролики, установленные в точках крепления нижних тяг механизма навески трактора с электрогидравлическими усилителями и блоком, связанным с электрогидравлическим усилителем, закрепленным на тракторе и подключенным к электронному реле, вход которого соединен с пороговым элементом, связанным с датчиками хода торсионоз через последовательно соединенные элемент «НЕ и вентиль, потенциальный вход которого соединен с выходом элемента «ИЛИ.
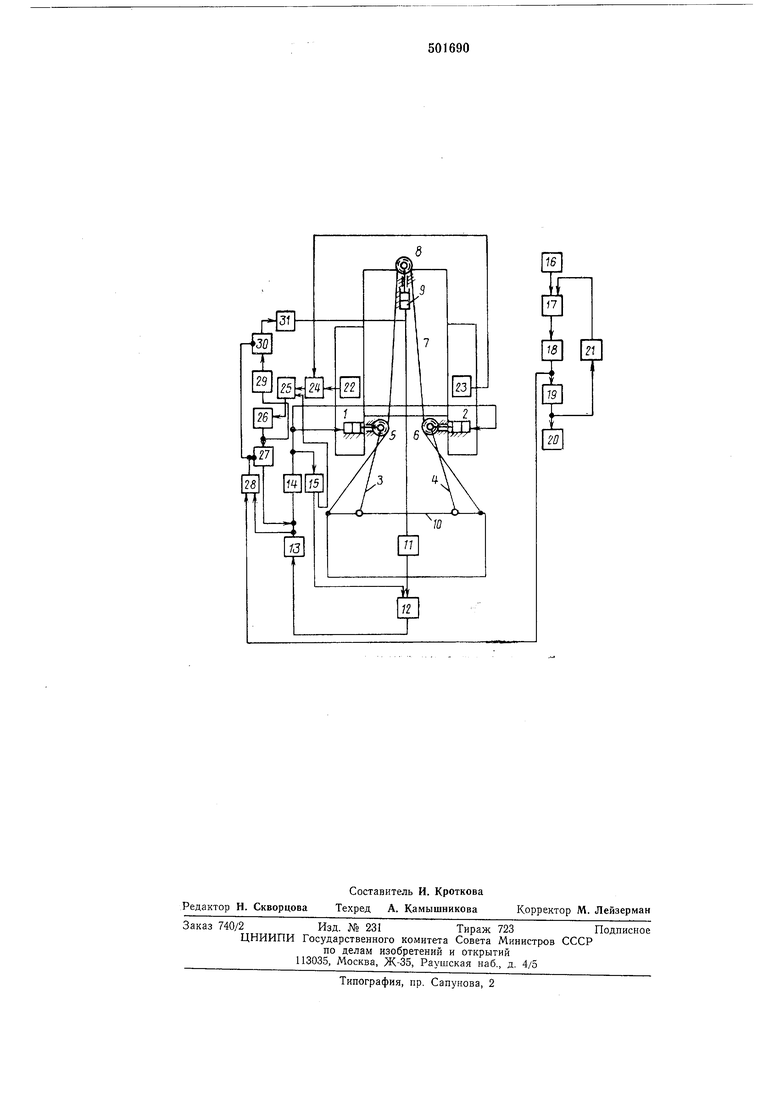
На чертеже изображена схема предлагаемого устройства.
Электрогидравлические усилители 1 и 2 присоединены к передним точкам продольных тяг навесной системы. В точках крепления
продольных тяг 3 и 4 закреплены ролики 5 и 6, на которых лежит трос 7, перекинутый через блок 8, соединенный с электрогидравлическим усилителем 9, закрепленным на тракторе.
На почвообрабатывающей мащине 10 установлен датчик 11 ее положения, который подключен к сумматору 12, включенному на входе блока 13 электронных реле электрогидравлических усилителей 1 и 2.
Между выходом блока 13 электронных реле и входом сумматора 12 включен блок внутренней обратной связи 14. Контур системы автоматического вождения,
управляющий механизмом поворота трактора, состоит из датчика 15 положения трактора, сумматора 16, блока 17 электронных реле, связанного с электрогидравлическими усилителями 18 механизма поворота и блока 19
внутренней обратной связи.
В устройство автоматического вождения включены датчики 20 и 21 углов закрутки торсионов трактора, разностный сигнал которых, как известно, пропорционален возмущающим моментам, действующим на трактор на склоне.
Датчики 21 и 20 хода торсионов нодключены на вход порогового элемента 22, связанного с электронным реле 13 через вентиль 23. Выходы электронных реле 13 и 17 соединены со схемой «ИЛИ 24, которая подключена к потенциальному входу вентиля 23. Блок 22 пороговых элементов через элемент «НЕ 25 и вентиль 26 подключен к электронному реле 27 электрогидравлического зсилителя 9. К потенциальному входу вентиля 26 подключен также выход элемента «ИЛИ 24.
Устройство работает следующим образом.
Если почвообрабатывающую мащину уводят с заданной траектории раньще, чем трактор, то сигнал отклонения поступает от датчика 11 через сумматор 12 на блок 13 электронных реле, который включает соответствующий электрогидравлический усилитель, перемещающий один из роликов.
Перемещение ролика передается через нижние тяги навесной системы на почвообра- . батывающую машину и тем самым обеспечивается стабилизация траектории ее движения. Данная часть схемы работает аналогично в процессе маневра трактора при превыщении им некоторого допустимого отклонения.
Таким образом, существенно повышается точность движения агрегата благодаря автономности управления орудием и трактором, значительно снижается частота включений механизма поворота.
Если отклонение трактора и почвообрабатывающей машины лежат в заданных допусках, то сигналы поступают от включенных по разностной схеме датчиков 20 и 21 хода торсионов на вход порогового элемента 22, через вентиль 23 на блок 13 электронных реле и на соответствующие электрогидравлические усилители 1 и 2.
При управлении электрогидравлическими усилителями 1 или 2 по сигналам датчиков положения трактора или почвообрабатывающей машины на вход электронного реле 27 сигнал не поступает благодаря элементу «ПЕ 25. Когда сигнал на выходе порогового элемента 22 равен «О, срабатывает электрогидравлический усилитель 9, который через блок 8 натягивает трос 7, жестко блокируя таким образом трактор и почвообрабатывающую машину. Однако при этом результирующая сил, действующая со стороны почвообрабатывающей машины на трактор, оказывается уже смещенной в сторону таким образом, 5 чтобы обеспечить сигнал, близкий к нулю на выходе датчиков хода торсионов. Таким образом, обеспечивается компенсация возмущающих воздействий на трактор при его движении поперек склона.
10 Если на выходе датчиков И и 15 появляется сигнал, что свидетельствует о превышении агротехнического допуска трактором и почвообрабатывающей машиной, то вентиль 26 запирается, электронное реле выключает
15 электрогидравлический усилитель, трос перестает блокировать почвообрабатывающую мащину и трактор, одновременно вентиль 23 прекращает доступ сигнала от датчиков хода торсионов.
Предмет изобретения
Устройство для автоматического вождения
5 тра,кто1р.ного агрегата на оклонах, содержащее датчики положения трактора и сельскохозяйст1венной машины, подключенные к блоку упрагвления механизма поворота трактора и блоку управления механизма поворотасель0 скохозяйственной машины, отличающеес я тем, что, с целью повышения точности вождения агрегата и снижения частоты управляющих воздействий на механизм поворота трактора, устройство выполнено в виде по
5 крайней мере, двух торсионных датчиков, подключенных ко входу порогового элемента, один из выходов которого через элемент «НЕ и вентиль подключен ко входу электронного реле, выход которого связан с закрепленным
0 на тракторе электрогидравлическим усилителем, имеющим ролик с перекинутым через него тросом, опирающимся на два других ролика, установленных в точках крепления нижних тяг механизма навески и соединенных с указанными электрогидравлическими усилителями, и закрепляемого на сельскохозяйственной машине, а второй выход порогового элемента через второй вентиль подключен к выходу элемента «ИЛИ, потенциальному входу первого вентиля и к блоку управления механизма поворота сельскохозяйственной машины, причем вход упомянутого элемента «ИЛИ подключен к блокам управления механизмов поворота трактора и сельскохозяйственной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для автоматического поворота тракторного агрегата | 1977 |
|
SU727169A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического вождения тракторного агрегата на виноградниках | 1980 |
|
SU923396A1 |
| Электрогидравлическая система автоматического регулирования тяговой загрузки трактора | 1984 |
|
SU1294302A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для автоматического вождения тракторного агрегата на виноградниках | 1986 |
|
SU1414338A2 |
| Способ автоматического вождения колесных машин и устройство для его осуществления | 1987 |
|
SU1523069A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |