Г
Изобретение относится к устройствам для укладки в коробки люминесцентных ламп.
Известно устройство для укладки в коробки штучных предметов, содержащее транспортер с носителями, питатель коробок, питатель штучных предметов, укладочный механизм и загибатели клапанов коробки.
Дель изобретения - возможность надежной упаковки хрупких предметов.
Для достижения этой цели каждый носитель транспортера состоит из неподвижной и подъемно-опускной платформ, укладочный механизм выполнен в виде четырех вертикальных бесконечных цепей с поводками, попарно расположенных с боковых сторон транспортера, и взаимодействующих с поводками подъемно-опускных кареток и ползунов с захватами для коробок и предметов, и загибатели клапанов коробки - в виде подпружиненных поворотных рычагов, укрепленных на неподвижной платформе.
Подъемно-опускные платформы имеют Побразную форму.
Захваты для коробок представляют собой подпружиненные планки, ползуны которых шарнирно закреплены на тягах.
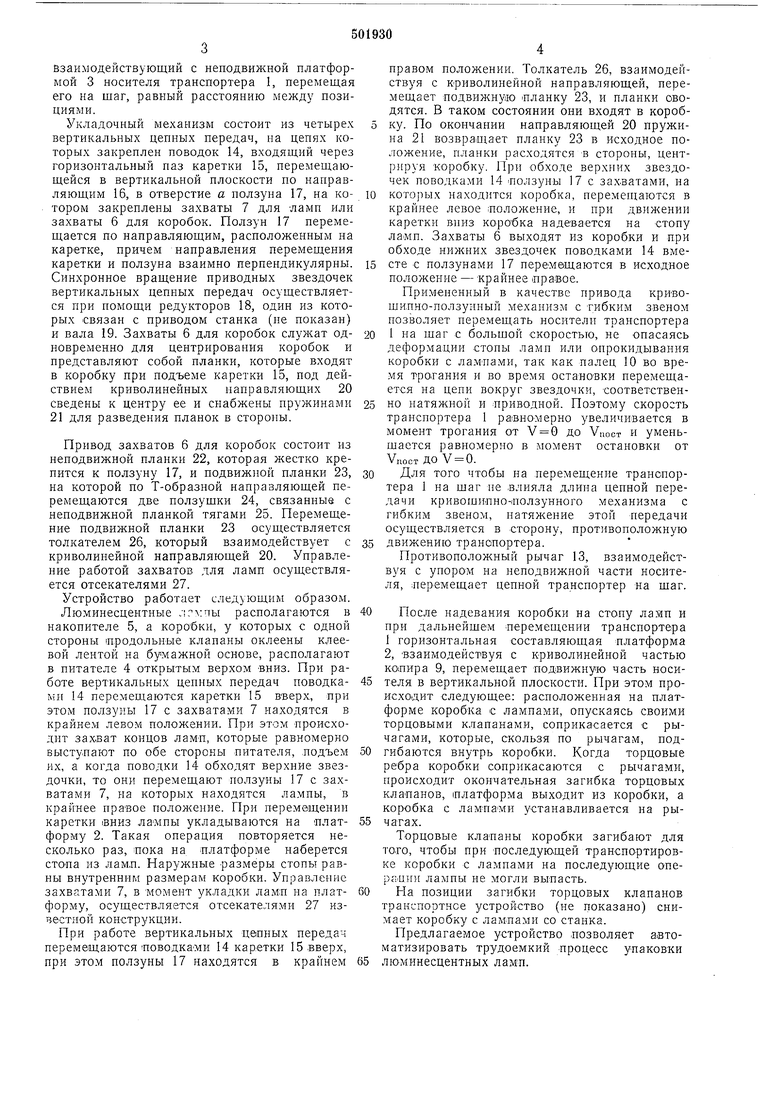
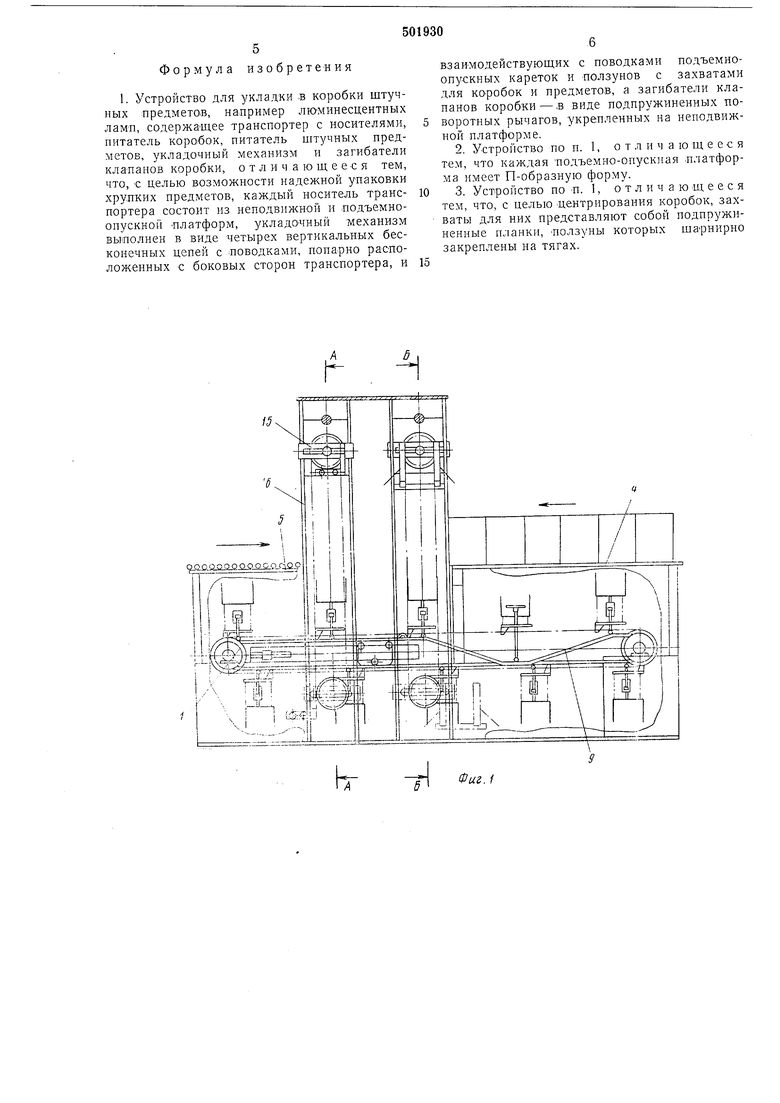
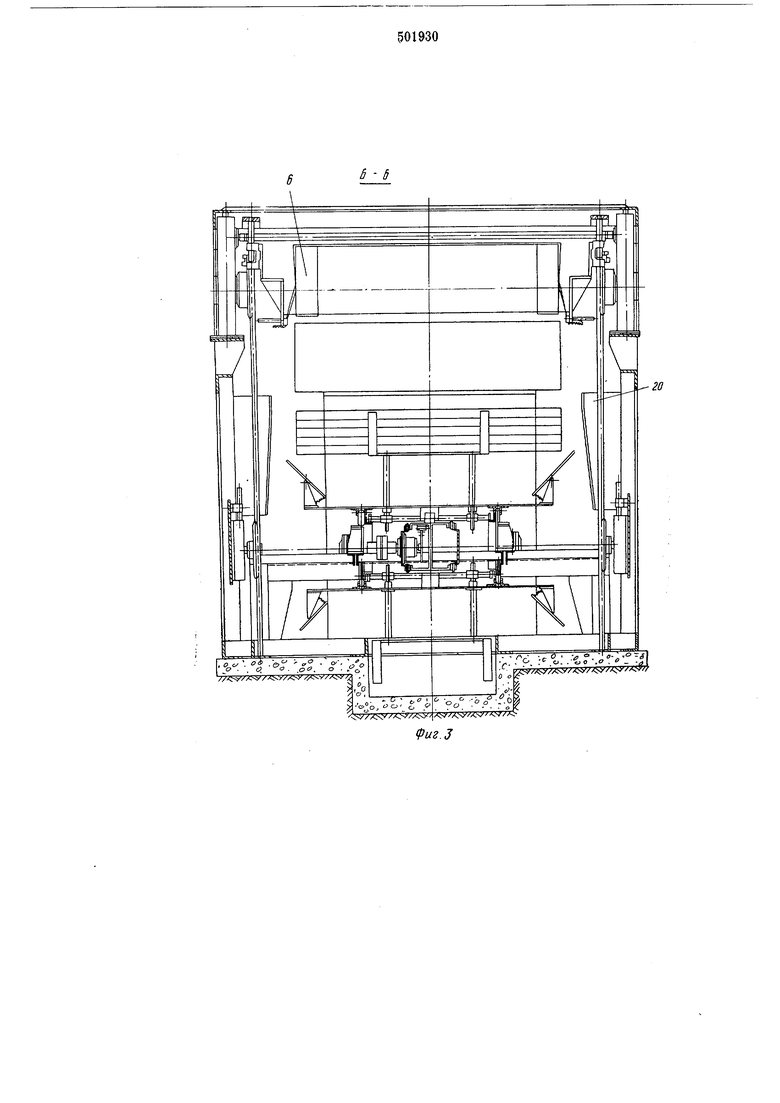
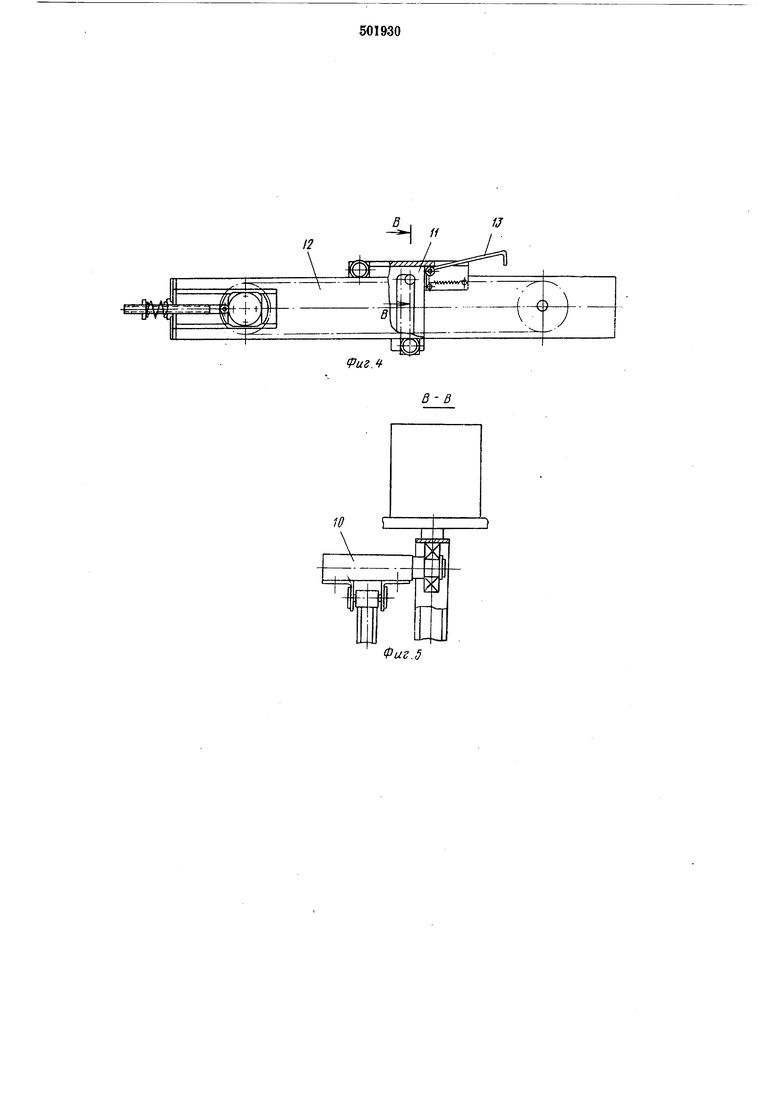
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - привод транспортера;
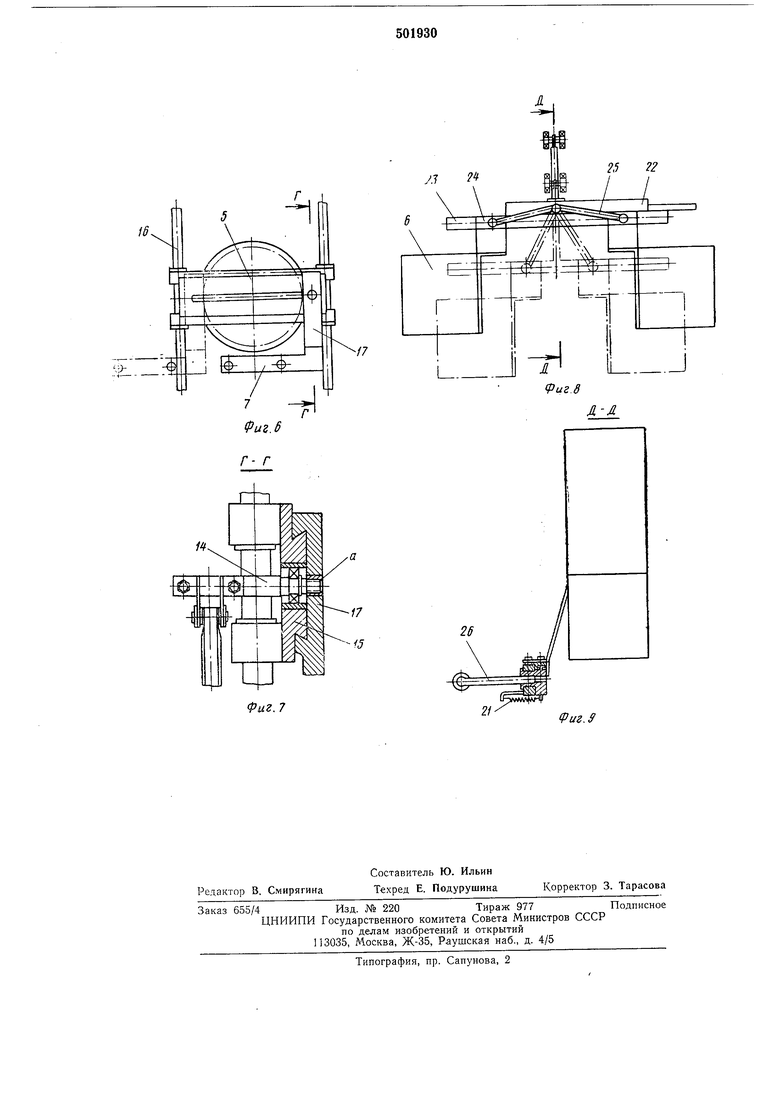
на фиг. 5 - разрез по В-В на фиг. 4; на фиг. 6 - каретка с ползуном; на фиг. 7 - разрез по Г-Г на фиг. 6; на фиг. 8 - захват для коробок; на фиг. 9 - разрез по Д-Д на фиг. 8.
Устройство состоит из цепного транспортера 1, носители которого имеют подвижную платформу 2 и неподвижную платформу 3, литателя 4 коробок, питателя 5 люминесцентных ламп, укладочного механизма, имеющего захваты 6 для коробок, захваты 7 для предметов и загибатели 8 клапанов коробки.
Длина платформы 2 выбрана соответственно короче длины ламп, концы которых выступают по ее обе стороны на величину, равную высоте торцового клапана коробки. Платформа имеет П-образную форму, горизонтальная часть которой взаимодействует с копиром 9.
На платформе 3 под углом к направлению ее перемещения шарнирно укреплены поворотные подпружиненные загибатели 8, выполненные в виде рычагов.
В качестве привода цепного транспортера 1 применен кривощипно-ползунный механизм с гибким звеном, выполненным в виде горизонтальной цепной передачи, на цепях которой закреплен палец 10, входящий в вертикальный паз каретки И, перемещающейся по направляющим 12 и несущей рычаг 13, взаимодействующий с иеподвижной платформой 3 носителя транспортера 1, перемещая его на шаг, равный расстоянию между позициями. Укладочный механизм состоит из четырех вертикальных цепных передач, на цепях которых закреплен поводок 14, входящий через горизонтальный паз каретки 15, перемещающейся в вертикальной плоскости по направляющим 16, в отверстие а ползуна 17, ца котором закреплены захваты 7 для ламп или захваты 6 для коробок. Ползун 17 перемещается по направляющим, расположенным на каретке, причем направления перемещения каретки и ползуна взаимно перпендикулярны. Синхронное вращение приводных звездочек вертикальных цепных передач осуществляется при помощи редукторов 18, один из которых Связан с приводом станка (пе показан) и вала 19. Захваты 6 для коробок служат одновременно для центрирования коробок и представляют собой планки, которые входят в коробку при подъеме каретки 15, под действием криволинейных направляющих 20 сведены к центру ее и снабжены пружинами 21 для разведения планок в стороны. Привод захватов 6 для коробок состоит из неподвижной планки 22, которая жестко крепится к ползуну 17, и подвижной планки 23, на которой по Т-образной направляющей перемещаются две ползушки 24, связанные с неподвижной планкой тягами 25. Перемещение подвижной планки 23 осуществляется толкателем 26, который взаимодействует с криволинейной направляющей 20. Управление работой захватов для ламп осуществляется отсекателями 27. Устройство работает следующим образом. Люминесцентные . располагаются в накопителе 5, а коробки, у которых с одной стороны продольные клапаны оклеены клеевой лентой на бумажной основе, располагают в питателе 4 открытым верхом вниз. При работе вертикальных цепных передач поводками 14 перемещаются каретки 15 вверх, при этом ползуны 17 с захватами 7 находятся в крайнем левом положении. При этом происходит захват концов ламп, которые равномерно выступают по обе стороны цитателя, лодъем их, а когда поводки 14 обходят верхние звездочки, то они перемещают ползуны 17 с захватами 7, на которых находятся лампы, в крайнее правое положение. При перемещении каретки вниз ла-мпы укладываются на платформу 2. Такая операция повторяется несколько раз, пока на платформе наберется стопа из ламл. Наружные размеры стопы равны внутренним размерам коробки. Управление захватами 7, в момент укладки ламл на платформу, осуществляется отсекателями 27 изчестной конструкции. При работе вертикальных цепных передач перемещаются ловодкаМИ 14 каретки 15 вверх, при этом ползуны 17 находятся в крайнем правом положении. Толкатель 26, взаимодействуя с криволинейной направляющей, перемещает подвижную лланку 23, и планки сводятся. В таком состоянии они входят в коробку. По окончании направляющей 20 пружина 21 возвращает планку 23 в исходное положение, планки расходятся в стороны, центрируя коробку. При обходе верхних звездочек поводками 14 -ползуны 17 с зах-ватами, на которых наход)1тся коробка, перемен1аются в крайнее левое ;положение, и при движении каретки вниз коробка надевается на стопу ламп. Захваты 6 выходят из коробки и при обходе нижних звездочек поводками 14 вместе с ползунами 17 перемещаются в исходное положение - крайнее правое. Примененный в качестве привода кривошипно-ползунный механизм с гибким звеном позволяет перемещать носители транспортера 1 на шаг с большой скоростью, не опасаясь деформации стопы ламп или опрокидывания коробки с лампами, так как палец 10 во время тротания и во время остановки перемещается на цепи вокруг звездочки, соответственно натяжной и приводной. Поэтому скорость транспортера 1 равномерно увеличивается в момент трогания от V 0 до VUOCT и уменьшается равномерно в момент остановки от VnocT до V 0. Для того чтобы на перемещение транспортера 1 на шаг не влияла длина цепной передачи кривошипно-ползунного механизма с гибким звеном, натяжение этой передачи осуществляется в сторону, противоположную движению транспортера. Противоположный рычаг 13, взаимодействуя с уиорОМ на неподвижной части носителя, перемещает цепной транспортер на шаг. После надевания коробки на стопу ламп и при дальнейшем леремеил,ении транспортера 1 горизонтальная составляющая платформа 2, взаимодействуя с криволинейной частью колира 9, перемещает подвижную часть носителя в вертикальной плоскости. При этом происходит следующее: расположенная на платформе коробка с лампами, опускаясь своими торцовыми клапанами, соприкасается с рычагами, которые, скользя по рычагам, подгибаются внутрь коробки. Когда торцовые ребра коробки соприкасаются с рычагами, происходит окончательная загибка торцовых клапанов, платформа выходит из коробки, а коробка с лампами устанавливается на рычагах. Торцовые клапаны коробки загибают для того, чтобы при последующей транспортировке коробки с лампами на последующие оперЯЦии лампы не могли выпасть. На позиции загибки торцовых клапанов ранспортное устройство (не показано) снимает коробку с лампами со станка. Предлагаемое устройство позволяет автоатизировать трудоемкий процесс упаковки юминесцентных ламп.
Формула изобретения
1. Устройство для укладки в коробки штучных предметов, например люминесцентных ламп, содержащее транспортер с носителями, питатель коробок, питатель штучных предметов, укладочный механизм п загибатели клапанов коробки, о т л и ч а ю ш е е с я тем, что, с целью возможности надежной упаковки хрупких предметов, каждый носитель транспортера состоит из неподвижной и подъемноопускной платформ, укладочный механизм выполнен в виде четырех вертикальных бесконечных цепей с поводками, попарно расположенных с боковых сторон транспортера, и
взаимодействующих с поводками подъемноопускных кареток и ползунов с захватами для коробок и предметов, а загибатели клапанов коробки - в виде подпружиненных поворотных рычагов, укрепленных на неподвижной платформе.
2.Устройство по п. 1, о т л и чающееся тем, что каждая подъемно-опускная платформа имеет П-образную форму.
3.Устройство по п. 1, отличающееся тем, что, с целью центрирования коробок, захваты для них представляют собой подпружнненные планки, ползуны которых шарнирно закреплены на тягах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| УСТРОЙСТВО для УКЛАДКИ МЕЛКОШТУЧНЫХ ПРЕДМЕТОВ В КОРОБКИ С ПЕРЕГОРОДКАМИ | 1969 |
|
SU247845A1 |
| Машина для тренировки и испытания люминосцентных ламп | 1973 |
|
SU496620A1 |
| Устройство для обандероливания картонных коробок | 1973 |
|
SU486966A1 |
| Автоматическая линия для упаковывания цилиндрических предметов | 1985 |
|
SU1468820A1 |
| Линия для упаковки изделий в коробки | 1989 |
|
SU1701591A1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ СИГАРЕТ В ПАЧКИ | 1969 |
|
SU242027A1 |
| Устройство для укладки штучныхиздЕлий B КОРОбКи | 1978 |
|
SU839865A1 |
| УСТРОЙСТВО для ЗАВЕРТЫВАНИЯ ШТУЧНЫХ ПРЕДМЕТОВ | 1972 |
|
SU335164A1 |
| Устройство для укладки штучныхиздЕлий B ТАРу | 1979 |
|
SU839866A1 |
СчУ ; 5. /ЛХ/Л /Л.Ч/ С-Т/ - §
ipuz.f
Фиг. 7
J I i
(puz.S
Л-Л
26
ipuz.s
