(54) СКЛАД ДЛЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи грузов с гравитационного стеллажа | 1986 |
|
SU1404420A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Многоярусный стеллаж | 1982 |
|
SU1076375A1 |
| Склад для хранения штучных грузов | 1974 |
|
SU628038A1 |
| Механизированный склад для штучныхгРузОВ | 1979 |
|
SU850518A1 |
| Устройство для азгрузки стеллажей штучными грузами и разгрузки их | 1974 |
|
SU547376A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ | 1973 |
|
SU370142A1 |
1
Изобретение относится к области складского хозяйства.
Известны склады для штучных грузов, содержащие МНогоярусные зигзагообразные гравитационные стеллажи с роликовыми дорожками, имеющие одну позицию загрузки, между смежными Я русами которых устаио1влены концевые поворотные перегрузочные секции, причем роликовые дорожки снабжвны разделителями потока грузов.
Такие оклады неудобны тем, что они не полностью используют объем складского помещения, сложны по конструкции и в управлении.
Цель изобретения - увеличение емкости склада.
Для увеличения емкости склада смежные ярусы смещены один относительно другого в горизонтальной плоскости на ширину дорожки, а поворотная секция выполнена в виде рамы со смоитдроваямыми на ней продольной натравляющей планкой с уступами и параллельной роликам горизонтальной осью, на которой подвижно закреплена каретка с роликами, снабженная боковыми поперечными планками, опирающимися на-продолыную плаяку. Причем одна боковая планка щире другой на высоту уступов, а центр тяжести каретки смещен относительно горизонтальной оси.
Предлагаемый склад проще по конструкции
и позволяет полнее использовать емкость складского помещения.
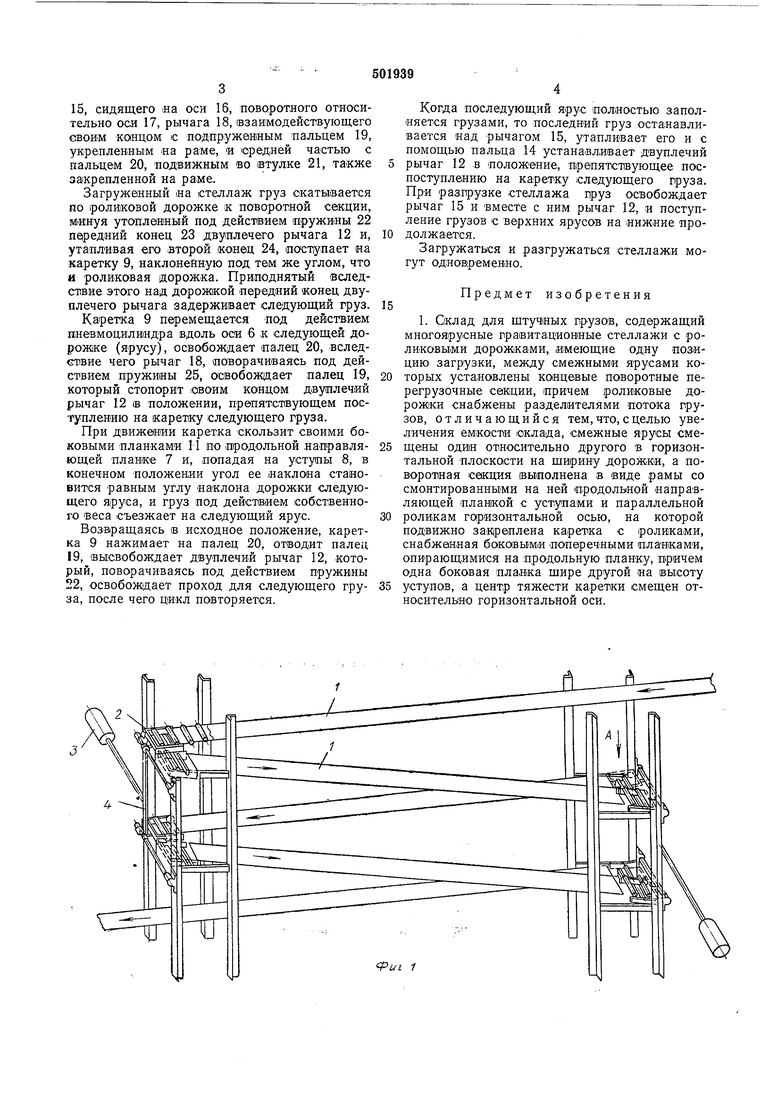
На фиг. 1 схематически изображен складской стеллаж, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 -вид по стрелке Б на фиг. 2; на фиг. 4 - разрез по В-В на фиг. 2; на фиг. 5 - вид по стрелке Г на фиг. 2; на фиг. 6 - разрез по Д-Д на фиг. 2; на фиг. 7 - разрез по Е-Е на фиг. 2; на фиг.
8 узел I на фиг. 2; на фиг. 9 - узел П на на фиг. 2; на фиг. 10 - сечение по Ж-Ж на фиг. 2.
Оклад представляет собой многоярусный стеллаж или группу стеллажей, каждый из
которых содержит прямолинейные наклонные роликовые дорожки 1, соединенные между собой поворотными секциями 2, и пневмоцилиндры 3, связанные с траверсами 4, соединяющими между собой поворотные секции.
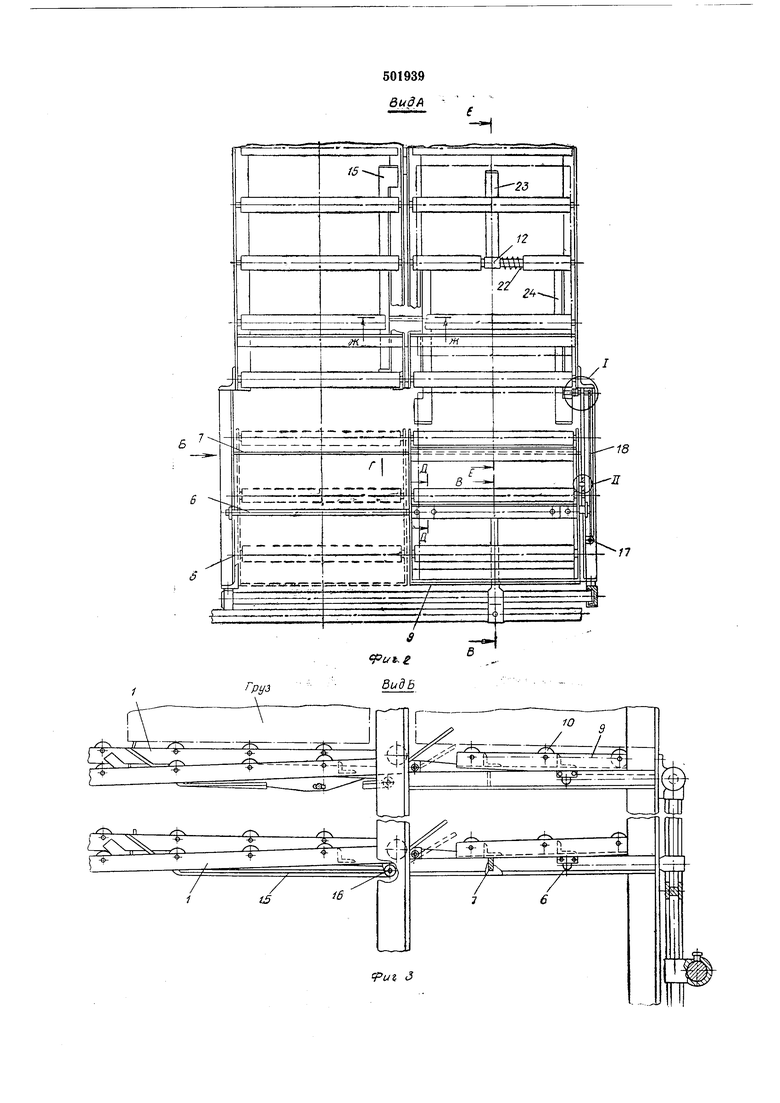
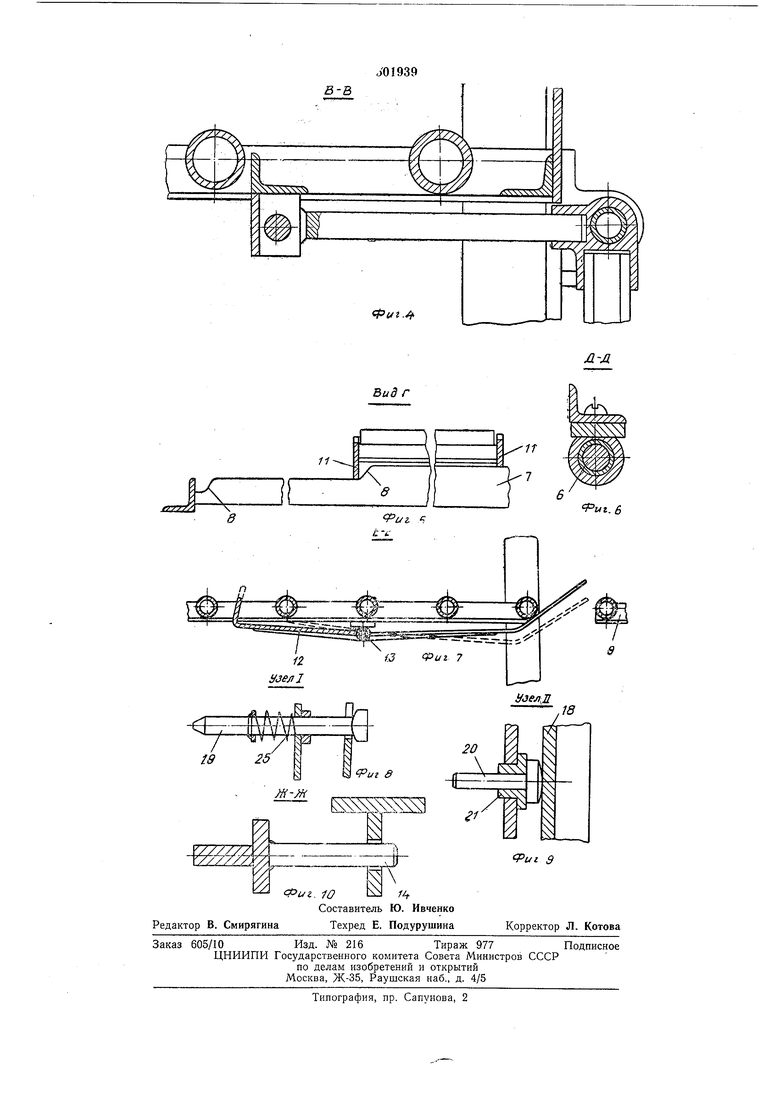
Поворотная секция выполнена в виде неподвижной рамы 5, на которой смонтирована горизонтальная ось 6 и продольная направляющая планка 7 с уступами 8. На оси 6 закреплены каретка 9, снабженная роликами 10, опирающимися на продольную планку 7 боковыми поперечными планками 11.
Каждая поворотная секция снабжена механизмом блокировки, состоящим из двуплечего рычага 12, сидящего на оси 13, жестко связанного с ним с помощью пальца 14, рычага
15, сидящего «а оси 16, поворотного относителБНО оси 17, рычага 18, взаимодействующего ОБОИМ КОНЦОМ 1C подлруженным пальцем 19, укрепленным «а раме, « средней частью с пальцем 20, подвижным во втулке 21, также закрепленной на раме.
Загруженный 1на стеллаж груз скатывается по роликовой дорожке к поворотной секции, минуя утопленный под действием пружвны 22 пе|редний конец 23 двуплечего рычага 12 и, утапливая его второй конец 24, постгупает на каретку 9, наклонейную под тем же углом, что и роликовая дорожка. Приподнятый вследствие этого над дорожкой передний конец двуплечего рычага задерживает следующий груз.
Каретка 9 перемещается под действием яневмоц.или1ндра вдоль оси 6 к следующей дорожке (ярусу), освобождает палец 20, вследствие чего рыча1Г 18, поворачиваясь под действием пружи ны 25, освобождает палец 19, который стопорит своим концом двуплечий рычаг 12 в положении, препятствующем поступлению на каретку следующего груза.
При движении каретка скользит своими боковыми планками 11 по продольной направляющей планке 7 и, попадая на уступы 8, в конечном положении угол ее наклона становится равным углу наклона дорожки следующего яруса, и груз под действием собственного веса съезжает на следующий ярус.
Возвращаясь в исходное положение, каретка 9 нажимает на палец 20, отводит палец 19, высвобождает двуплечий рычаг 12, который, поворачиваясь под действием пружины 22, освобождает проход для следующего груза, после чего цикл повторяется.
Когда последующий ярус полностью заполняется грузами, то последний груз останавливается над рычагом 15, утапливает его и с помощью пальца 14 устанавливает двуплечий рычаг 12 в положение, препятствующее поспоступлению на каретку следующего груза. При разгрузке стеллажа лруз освобождает рычаг 15 и вместе с ним рычаг 12, и поступление грузов с верхних ярусов на нижние продолжается.
Загружаться и разгружаться стеллажи могут одновременно.
Предмет изобретения
7
501939
видА
-18 -Е
/7
