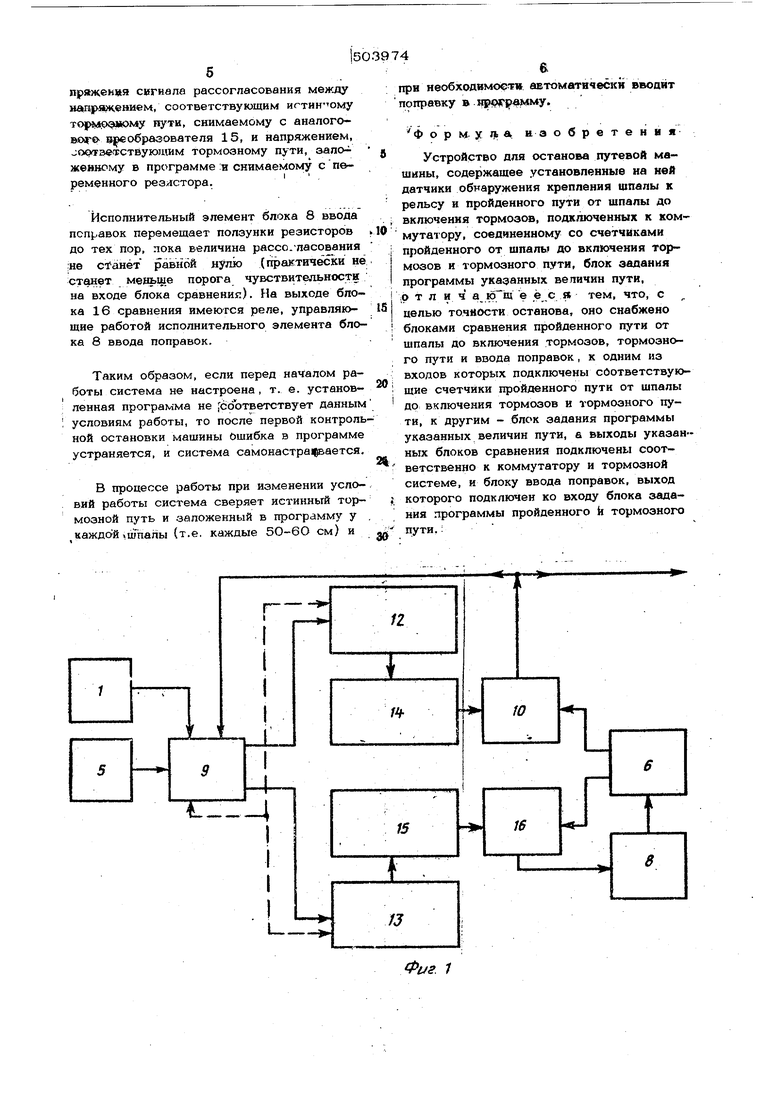
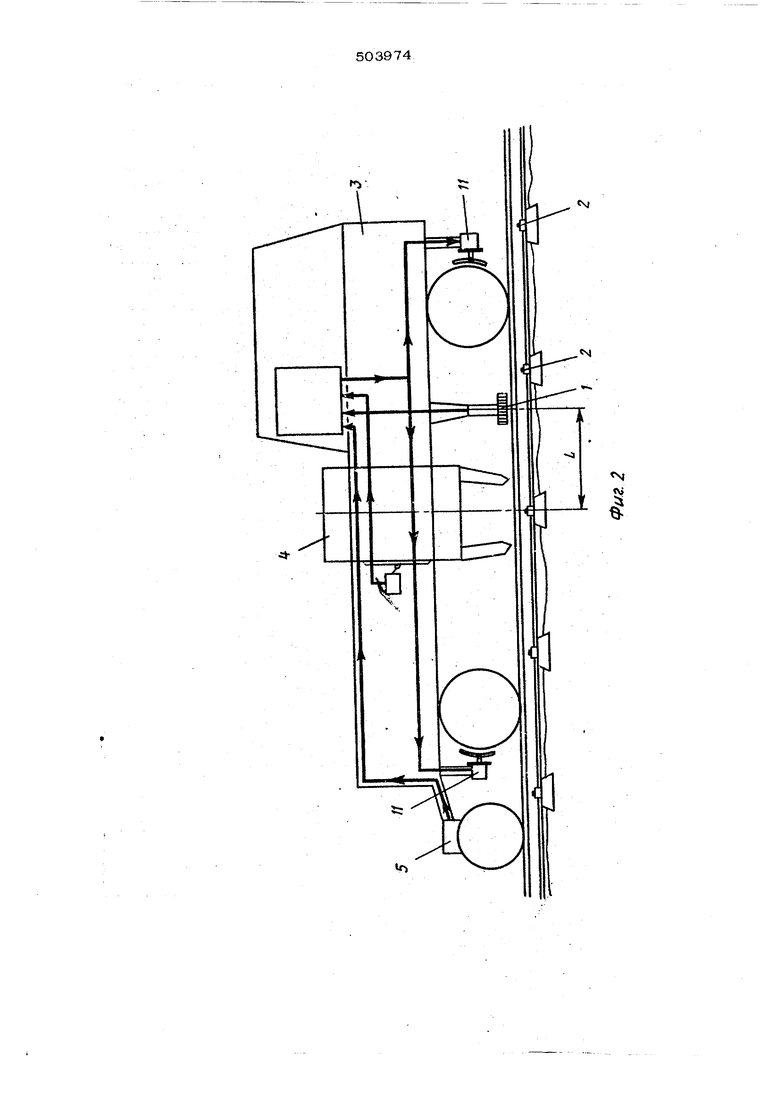
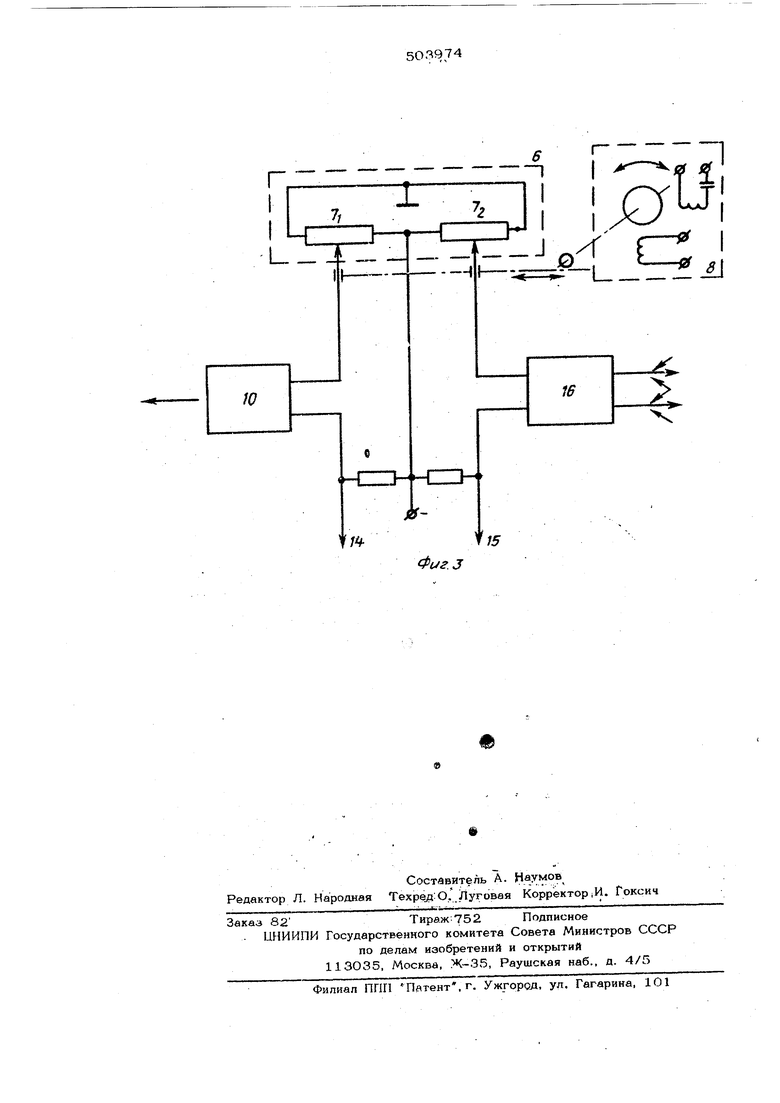
Датчик 5 пройденного пути от шпапы до включения тормозов также крепится к раме машины, место расположения его пр извольное. Этот датчик представляет со- б,и устройство с материальным колесом, катящимся по рельсу и выдающим электр ескйе импульсы через определенные отрезки пути (например, сантиметры). Блок 6 задания программы пройденного и тормозного пути представляет собой, сдвоенные переменные резисторы и 7 ползунки которых жестко механически сое динены (имеют один общий приводной вап либо их валы соединены через шестерни) и приводятся в движение исполнительным элементом блока 8 ввода поправок в программу. Коммутатор 9 имеет три входа, один из которых соединен с выходом датчика 1 обнаружения крепления шпалы к рельсу и имеет элемент запоминания команды с него, j Другой вход соединен с выходом блока 1О сравнения пройденного пути от шпалы до включениятормозов 11 и также имеет элемент запоминания команды с него. Третий вход коммутатора 9 соединен с выходом датчика 5 пройденного пути от шпалы до включения тормозов. Выходы коммутатора 9 соотвётственно подключены к входам счетчиков 12 и 13 пройденного пути от шпалы до включения тормозов и тормозного пути, к выходам которых через соответствующие аналоговые преобразователи 14 и 15-под ключены одни входы блока 10 сравнения пройденного пути от шпaл до включения тормозов и блока 16 сравнения заданного и фактического тормозных путей соответственно. Устройство работает следующим образом. При движении путевой машины с дат чика 1 обнаружения крепления шпалы к рельсу поступает электрический импульс на коммутатор 9. Там этот сигнал запоминается, и выдается разрешающая коман да на прохождение сигналов с датчика 5 пройденного пути от шпалы до включения тормозов нь счетчик 12 пути, отсчиты1вающий расстояние, пройденное машиной от шпалы до заложенной по программе точки пути, в которой включаются тормоза 11 машины. Выходы счетчика 12 соединены с аналоговым преобразователем 14, прэобразующим двоичный код в напряжение. Величина ьути, которую должна пройти машина от шпалы до точки пути, соответствующей включению тормозной системы, задается в виде величины напряжения, снимаемого с части переменного, резистора 7 , являющегося элементом 5{iaKa 6 задания программы пройденного и тд рмозного пути. Напряжения с аналогового преобразователя 14 и переменного резистора 7. подаются в блок 1О сравнения пройденного пути от шпалы до включения тормозов, с которого при равенстве этих напряжений поступает сигнал на включение тормозов 11 машины. Одновременно с этим сигналом подается сигнал и на коммутатор 9, переключающий поступление импульсов датчика 5 пройденного пути от шпалы до включения тормозов с входа счетчика 12 пути на вход счётчика 13 тормозного пути. Счетчик 1о по своей схеме аналогичен первому. Блок 16 сравнения заданного и фактического тормозных путей i этой схеме реегирует не только на величину напряжения рассогласования, но и на его п лярность, что позволяет определить больше или меньше истинный тормозной путь, тормозной путь, заложенный в п рограммеГи вы- дять определенный сигнал на введение коррекции, т. е. на увеличение или уменьшение напряжения на переменном резисторе 7 , ; «i эквивалентного тормозному пути машины. Так как конструктивно ползунки (токосъемники) резисторов 1 и 1 счетчиков 12 и 13 механически жестко связаны, то при изменении напряжения, соответствующего величине тормозного пути машин 51, изменяется и напряжение, соответствующее пути от шпалы, над которой прошел датчик 1, до точки включения тормозной системы. Причем резисторы 7 и 72 имеют такое электрическое соединение (см. фиг. 3), что при любом положении ползунков обоих резисторов сумма снкм. емых с них напряжений остается постоянной и соответствует расстоянию L (см. фиг. 2) от датчика 1 до центральной оси рабочего органа 4 машины, и при изменении положения ползунков изменяется лишь отношение отрезков пути от шпалы, . пройденной датчиком 1 до точки включения тормозной системы и тормозного пути. Введение коррекции осуществляется исполнительным элементом блока 8 ввода поправок, перемещающим ползунки резисторов 7 и 7„. Направление вращения и величина угла поворота исполнит(;/1ьного элементе его зависит от полярности и амплнауды напря)кенвя сигнала рассогласования между иапржк нием, соответствующим игтинюму тормр жому пути, снимаемому с анапогомхг© В реобразователя 15, и напряжением, joQiTB TCTByroJUHM тормозному пути, эаложеннсму в программе :и снимаемому с переменного резистора. Исполнительный элемент блока 8 ввода поправок перемещает ползунки резисторов до тех пор, пока величина рассо.-пасования :не станет равной нулю (практически не стайет меньще порога чувствительности на входе блока сравнения). На выходе блока 16 сравнения имеются реле, управляющие работой исполнительного элемента блока 8 ввода поправок. Таким образом, если перед началом работы система не настроена , т. е. уставовленная программа не Ссютветствует данным условиям работы, то после первой контроль ной остановки машины Ошибка в программе устраняется, и система самонастраивается В процессе работы при изменении условий работы система сверяет истинный тормозной путь и заложенный в программу у каждой .иГпалы {т.е. каждые 5О-6О см) и
/2
ю при необходимости автоматически вводит поправку в нрорр мму. Ф о р м X л, а изобретения Устройство для останова путевой машины, содержащее установпенные на ней датчики обнаружения крепления шпалы к рельсу и пройденного пути от шпалы до включения тормозов, подкшоченных к коммутатору, соединенному со счетчиками пройденного от шпалы до включения тормозов и тормозного пути, блок задания программы указанных величин пути, ;Р т л и ч а е ё ,с « тем, что, с целью точности останова, оно снабжено блоками сравнения пройденного пути от шпалы до включения тормозов, тормозного пути и ввода поправок, к одним из входов которых подключены сйответствующие счетчики пройденного пути от шпалы до включения тормозов и тормозного пути, к другим - блок задания программы указанных величин пути, а выходы указанных блоков сравнения подключены соответственно к коммутатору и тормозной системе, и блоку ввода поправок, выход которого подключен ко входу блока задания программы пройденного h тормозного пути,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ПУТЕВОЙ МАШИНЫ | 1998 |
|
RU2144966C1 |
| Устройство для остановки путевой машины | 1979 |
|
SU787539A1 |
| Устройство управления наклонной шахтной подъемной установкой | 1980 |
|
SU891550A1 |
| Устройство для обнаружения схода с рельсов транспортного средства | 1983 |
|
SU1245484A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| АВТОМАТ ДЛЯ КЛЕЙМЕНИЯ И РАЗМЕТКИ ДЕТАЛЕЙ | 1967 |
|
SU216469A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Устройство защиты шахтного подъемника от напуска каната | 1980 |
|
SU933594A1 |
| Устройство для управления движением поезда | 1980 |
|
SU882803A1 |
в
Фиг. 1
М
г.
n
.З
