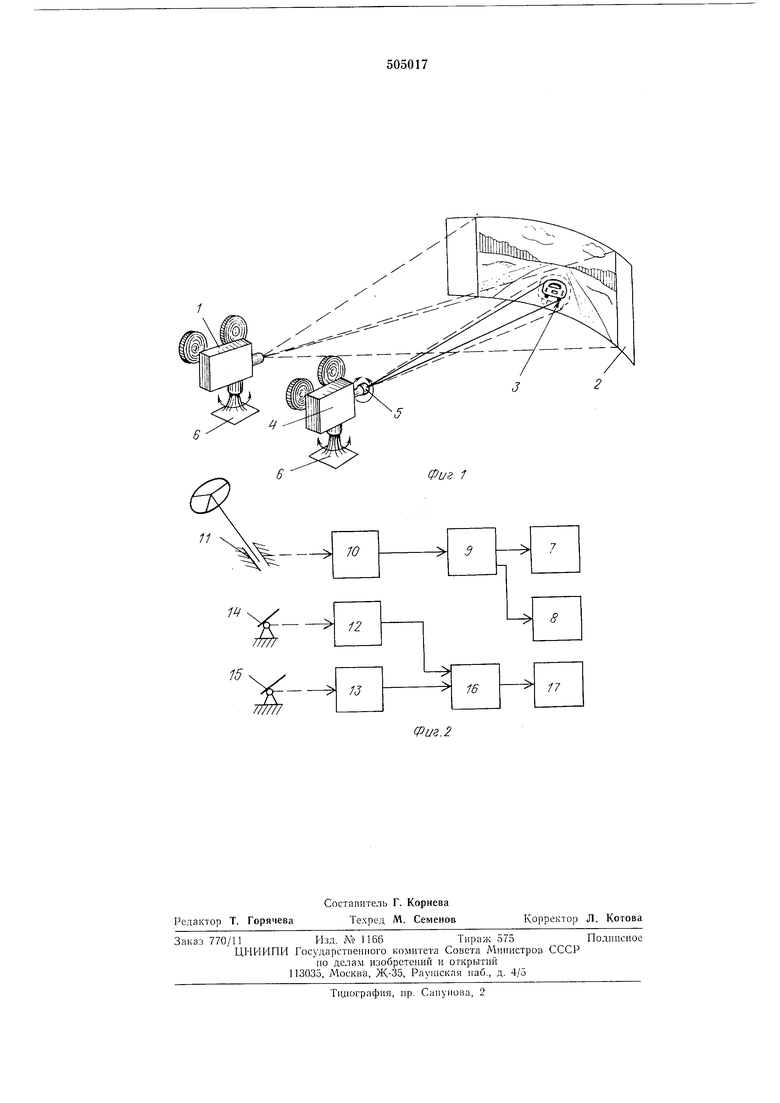
Наблюдая за дорожно-транспортной ситуацией на экране 2, в частности за положением лидера 3, водитель воздействует на органы управления 14, 11, 15, стремясь сохранить постоянным свое положение относительно лидера и дистанцию до него. При воздействии на рулевое колесо 11 изменяется электрический сигнал, снимаемый с датчика 10. Этот сигнал поступает на блок моделирования поворота, с которого снимаются сигналы, соответствующие изменению направления движения относительно дороги и изменению положения относительно лидера. Эти сигналы управляют механизмами поворота основного и дополнительного кинопроекторов.
Поворот основного кинопроектора имитирует изменение положения относительно дороги, а поворот дополнительного кинопроектора - и менение положения относительно лидера 3. Сигналы, снимаемые с датчиков 12 и 13 положения педалей 14 и 15 разгона и торможения, поступают на блок 16 моделирования скорости транспортного средства, который вырабатывает сигнал, соответствующий расстоянию до лидера 3. Этот сигнал поступает в блок 17 управления фокусным расстоянием объектива 5. Изменение фокусного расстояния вызывает изменение геометрических размеров лидера 3, что имитирует изменение расстояния до него.
Таким образом, водитель видит на экране результат своих управляющих воздействий на органы управления, т. е. имеет возможность активно воздействовать на имитируемую доро}кно-транспортную ситуацию. Кроме того, воздействуя на блок моделирования поворота транспортного средства, инструктор имеет возможность оперативно изменять дорожнотранспортную ситуацию, например менять режим движения лидера. Это позволяет интенсисЬицировать процесс обучения и повысить качество подготовки водителей трансиортных средств.
Предмет изобретения
Устройство для обучения управлению наземным транспортным средством, содержащее основной и дополпительпый кинопроекторы, установленные перед экраном, и органы управления транспортным средством, снабженные датчиками, отличающееся тем, что, с целью иовыщения эффективности обучения водителей, оно снабжено блоками моделирования поворота и скорости транспортного средства, механизмами поворота основного и дополнительного кинопроекторов и блоком управления фокусным расстоянием объектива доиолнительного кинопроектора, при этом
блок моделирования поворота трапспортпого средства своим входом соединен с датчиком угла поворота, а своими выходами соответственно - с механизмами поворота основного и дополнительного кинопроекторов, блок моделирования скорости своими входами соединен соответственно с датчиками положения педалей разгона и торможения, а выходом- с блоком управления фокусным расстоянием объектива дополнительного кинопроектора.
Фиг. 1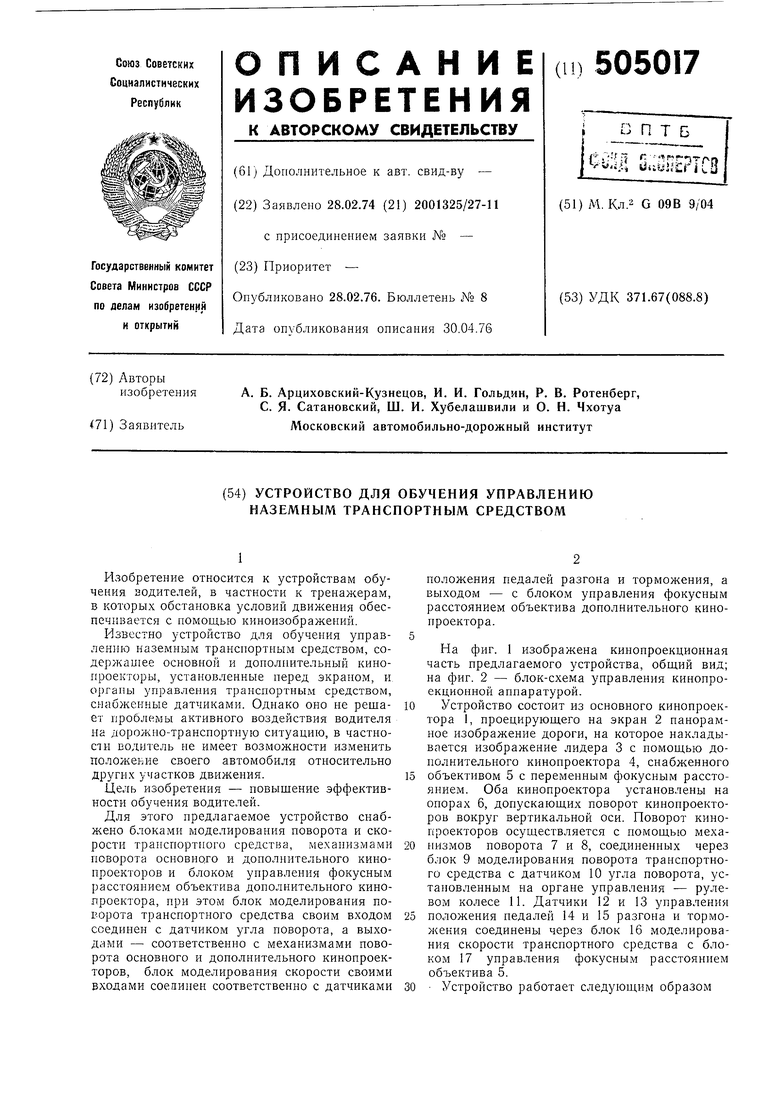
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| Устройство для группового обучения | 1974 |
|
SU506905A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
| Тренажер транспортного средства | 1983 |
|
SU1159052A1 |
| Тренажер для обучения водителей транспортных средств | 1980 |
|
SU985818A1 |
| ТРЕНАЖЁР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2715325C1 |