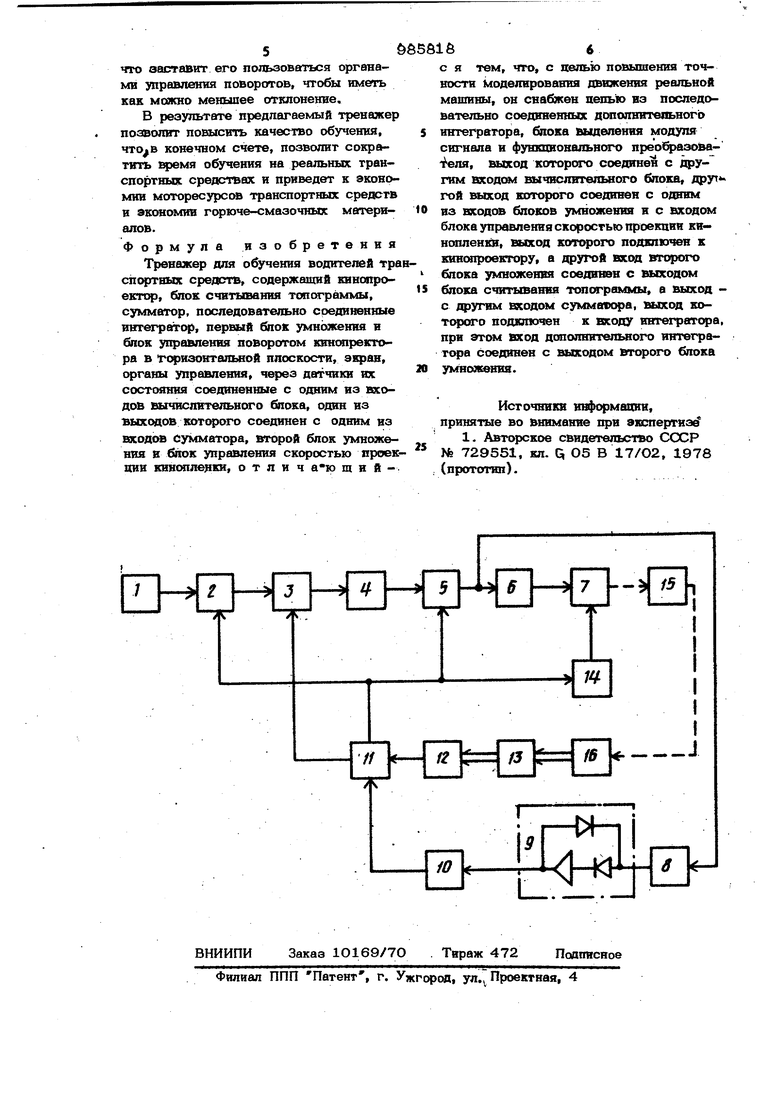
ного блока, другой выход коч-орого соединен с одним из входов блоков умножения и с Еосодом бпока управления скоростью проекции кинопленки, выход которого подключен к кинопроектору, а пругой вход второго блока умножения соединен с вьгходом бпока считывания топогра мы, а выход - с другим входом с;уммат6 выход которого подключен к входу интег тора, при этом вход дополнительного ийтегрвтора соединен с выходом второго блока умножения. На чертеже представлена блок-схема тренажера для обучения Водителей транспортных средств. Выход блока 1 считьгоания топограмм соединен в последовательную цепь с пер вым блоком 2 умножения, сумматором 3 интегратором 4, вторым блоком 5 умножения, блоком 6 управления новоротом кинопроектора 7 в горизонтальной плоскости. При этом выход второго блока 5 умножения соединен также с дополнительным интегратором 8, который подключен выходом к блоку 9 вьзделения модуля сигнала, который через преобразователь 1О соединен с одним из входов вычислительного блока 11, другой вход которого подключен к датчикам 12 состояния органов 13 управления. Один из выходов блока 11 соединен с входом сумматора 3, а другой с входами блоков 2 и 5 умножения и с входом блока 14 управления скоростью проекщщ кинопленки. Устройство содержит экран 15. Устройство работает следующим обра зом.. . Блок 1 считьгоания топограммы прео разует запись топограммы на киноленте рг напряжение, пропорциональное qэивиз.не трассы, которую видит водитель 16 на экране 15. Это напряжение с помощь блока 2 умножения умножается на напря жение, пропорциональное линейной скоро сти движения, снимаемого с второго вы хода вычислительного блока 11. Вычислительный блок 11 моде/гарует динамику движения транспортного средства, для которого создан тренажер. Предлагаемое устройство в зависимости от положения оргнаиов 13 управления, положение которых преобразуется в напряжение с помошью датчиков 12 и от напряжения на втором а:оде вычислительного биока 11, проп фцвонал1гного величине сопротивления движению, формирует напряжение, пропорциональное угловой скорости и пропорциональное линейной скорости движения транспортного средства. Сигнал, пропорциональный этим напряжениям через блок 14 управления - .управляет, скоростью проекции кинопленки в кинопроекторе 7. Таким образом, водитель 16 видит на экране 15 изменение картины местности. Блок 14 управления может быть выполнен, например, на магнитном, электромагнитном или каком-либо другом усилителе мощности со необходимыми элементами. На выходе блока 2 умножения формируется, пропорционально угловой скорости транспортного средства, и через сумматор 3 поступает на интегратор 4, На выходе интегратора 4 формируется напряжение, пропорциональное углу поворота машины. Выходное напряжение блока 5 умножения , пpcшqpциoнaльнoe линейной скорости отклонения, поступает на вход блока 6 управления повЬротом кинопроектора и на вход интегратора 8. При этом блок 6 управления поворачивает кинопроектор7-ъ горизонтальной плоскости, вызывая тем самым смещение изо,бражешш на экране 15. Водитель 16, видя это смещение, действует органами 13 управления так, чтоб напряжение с выхода вычислительного блока 11 было равно напряжению с выходе блока 2 умножения, но противоположно по закону. В результате этого угловая скррсть поворота машины относительно трах:ы становится равной нулю, т.е, компевсируется перемещение изображения на экране 15, Поступая на вход интегратора 8, напряжение интегрируется, в результате чего формируетсся напряжение, пропорциональное отклонению от заданной трассы. Это напряжение может бвлть разной полярности в зависимости от того, в какую сторону произошло отклонение. 71ля того, чтобы в дальнейшем это напряжение было одной полярности, оно поступает на блок 9 выделения модуля. Напряжение с выхода блока 9 выделения модуля через преобразователь 10; .поступает на второй вход вычислительного бпока 11 и, воздействуя на динамику моделируемого транспортного средства, снижает напряжение. Таким офазом, при отклонении от заданной 1рассы движения водитель, обучающийся на тренажере, будет видеть на экране снижение скорости движения. что заставит его пользоваться органами управления поворотов, чтобы иметь как мовкно меньшее отклонение. В результате предлагаемый тренажер позволт повысить качество обучения, конечном счете, позволит сократить tspeMa обучения на реальных транспортных средствах и приведет к экономии моторесурсов транспортных средств и экономии гсфюче-смазочных материалов. Формула изобретения Тренажер для обучения водителей тра спортных средств, содержащий кинопроектор, блок считывания топсн раммы, сумматор, последовательно соединенные интегратор, первый блок умножения и блок управления поворотом кхшопректора в Т(изонтальной плоскости, экран, органы управления, через датчики их состояния соединенные с одним из входов вычислительного блока, один из выходов которого соединен с одним из ВХОД сумматора, второй блок умножения и блок управления скоростью проек хсии кинопленки, о т л и ч аю ш и и с я тем, что, с двлью повышения точности Моделирования движения реальной машины, он снабжен цепью вз последовательно соединенных дополнительного интегратора, блока выделения модуля сигнала и функционального преобразоВа1 ля, выход которого соединен с другим входом вычислительного блока, друт. выход которого соединен с одним из Екодов блоков умножения и с входом блока управления сксфостью проекции кинопленки, выход котсфого подключен к кинопроектору, а другой вход второго блока умножения соединен с выходом блока считывания топограммы, а выход с другим Евсодом суммафсфа, выход кот(фого подключен к входу интетратора, при этом вход дополнительного интегратора соединен с выходом второго блока умножения. Источники информации, принятые во Внимание при экспертиз 1, Авторское свидетельство СССР № 729551, ЕЛ. С О5 В 17/О2, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения водителей транспортных средств | 1985 |
|
SU1257694A1 |
| Следящая система поворота проектора кинотренажера | 1984 |
|
SU1246052A2 |
| Следящая система поворота проектора кинотренажера | 1980 |
|
SU877472A2 |
| Тренажер водителя транспортного средства | 1980 |
|
SU930339A1 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU1029144A2 |
| Следящая система поворота проектора кинотренажера | 1978 |
|
SU729551A2 |
| Устройство для управления кинотренажером | 1984 |
|
SU1275515A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Следящая система поворота проектора кинотренажера | 1981 |
|
SU960724A2 |
| Следящая система поворота проектора кинотренажа | 1972 |
|
SU451057A1 |
