Изобретение относится к механизации и автоматизации мелиоративных работ.
Известно устройство для регулирования глубины копания траншей, включающее чувствительные элементы, подвижный рабочий элемент, рабочий орган с механизмом подъема, цепи управления с переключателями, датчики линейных перемещений и блок управления.
Однако в известном устройстве не обеспечивается требуемая точность регулирования глубины копания транщей по заданному уклону. Ощиб1ка регулирования глубины копания может находиться в пределах ±3-15 см, что превышает допустимую точность выполнения заданного уклона, равную ±2 см.
Цель изобретения - повышение точности регулирования глубины копания траншей по заданному уклону за счет устранения ошибок при угловых колебаниях рабочего органа землеройной машины.
Для этого в предлагаемом устройстве из чувствительных эле.ментов установлен с возможностью его вертикального пёремещеиия относительно подвижного рабочего элемента посредством корректирующего цилиндра, а два других чувствительных элемента установлены параллельно оси корректирующего цилиндра с возможностью их вертикальных перемещений относительно рабочего органа
посредством установленных на нем дополнительных цилиндров, причем корпус корре;ктирующего цилиндра соединен с чувствительным рабочим элементом посредством верхней тяги, а шток - с подвижным рабочим элементом посредством -нижней тяги с упором, установленным с возможностью взаимодействия с укрепленными на рабочем органе переключателями-.
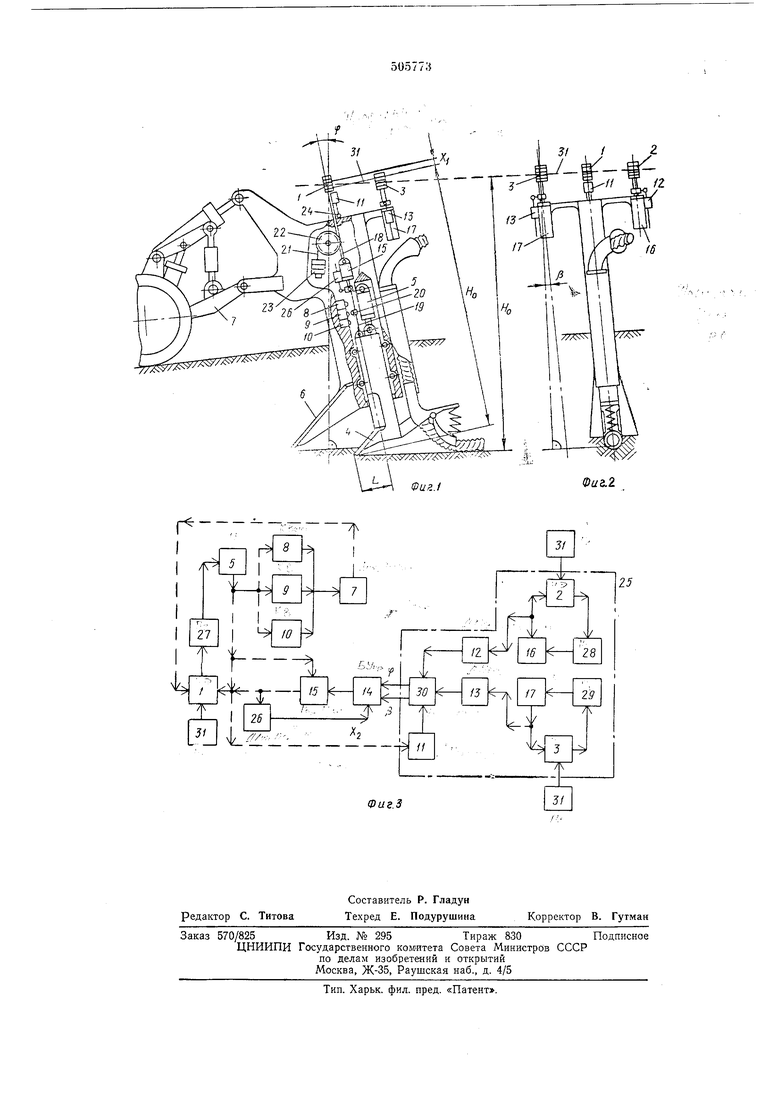
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - то же, вид сбоку; на фиг. 3 - блок-схема цепи управления подвижного рабочего элемента (электрическая цепь управления обозначена сплошной линией, а механическая взаимосвязь элементов - пунктиром).
Устройство включает в себя чувствительные элементы 1-3, подвижный рабочий элемент 4 с цилиндром 5, рабочий орган 6 с механизмол подъема 7, цепь управления с переключателями 8-10, датчики //-13 линейных перемещений, бло;к управления 14, корректирующий цилиндр 15, дополнительные цилиндры 16 и 17, верхнюю тягу 18 и нижнюю тягу
в виде троса 19 с упором 20. Верхняя тяга /S состоит из троса 21 с блоком 22 и падающим грузом 23 и штанги 24. Цепь управления корректирующим цилиндром 15 включает датчики угловых перемещений 25 рабочего органа
6, датчик 26 линейного перемещения штока
корректирующего цилиндра 15 и блок уиравления 14. Датчики угловых перемещений 25 выполнены с фотоэлектрическими чувствительными элементами /-3, преобразователями 27-29, исполнительными механизмами в виде дополнительных цилиндров 16 и 17, датчиками линейных перемещений 11-13 и вычислительным бЛО;КОМ 30.
Устройство работает следующим образом.
При выходе чувствительных элементов 1- 3 из плоскости луча 31, параллельного линии заданного уклона, они вь1ра батывают сигналы рассогласования. После преобразования в преобразо затёлях 27-29 сигналы рассогласования поступают на цилиндры 5, 16 и 17, которые возвращают чувствительные элементы /- 3 на горизонтальную плоскость луча 31. Величины перемещений исполнительных механизмов, регистрируемые датчиками //-13, поступают в блок 30, где вычисляются продольные ф и поперечные р перемещения рабочего органа 6, и далее - в блок управления 14. В зависимости от перемещений ф и |3 блок управления 14 вычисляет требуемую величину перемещения щтока цилиндра 15, а следовательно, и чувствительного элемента 1 по формулам:
л X,
COStp-COs : А Яо(1-cos ф cos Р) -Ь L sin ф,
где А - ощибка, возникающая при угловых колебаниях рабочего органа; Яо и L - координаты установки чувствительного элемента относительно нижней точки рабочего органа, см. при ф О, ip 0; ф и р - угловые продольные и поперечные перемещения рабочего органа; сравнивает Xi с сигналом Х, поступающим с датчика 26 линейного перемещения штока цилиндра 15, по формуле:
АХ Xi-X2
и при выдает сигнал на включение цилиндра 15, а при АХ 0 - на его отключение. При перемещении цилиндром 15 чувствительного элемента / с плоскости луча 31 сигнал рассогласования после преобразования в
преобразователе 27 поступает на силовой цилиндр 5,.который перемещает чувствительный элемент / снова на плоскость луча 31, а нижнюю точку подвижного рабочего элемента 4- на требуемую глубину. Ввиду малоинерционности системы с цилиндром 15 обеснечивается требуемое быстродействиеи высокая точность установки чувствительного элемента по вычисленному сигналу, устранение ощибок А и повыщение точности регулирования глубины копания траншей, дрен и т. п. по заданному уклону.
В крайних положениях подвижного рабочего элемента 4 относительно рабочего органа 6 переключатели 8 или 10 включают механизм подъема рабочего органа, а переключатель 9 отключает его в среднем положении подвижного рабочего элемента 4 относительно рабочего органа 6.
Формула изобретения
Устройство для регулирования глубины
копания транщей, включающее чувствительные элементы, подвижный рабочий элемент, рабочий орган с механизмом подъема, цепи управления с переключателям.и, датчики линейных перемещений и блок управления, о тл и ч а ю щ е е с я тем, что, с целью повыщения точности регулирования глубины; .копания транщей по заданному уклону за счет устранения ощибак при угловых колебаниях рабочего органа землеройной мащины, один из чувствительных элементов установлен с возможностью его вертикального перемещения относительно подвижного рабочего элемента посредством корректирующего цилиндра, а
два других чувствительных элемента установлены параллельно оси корректирующего цилиндра с возможностью их вертикальных перемещений относительно рабочего органа посредством установленных на нем дополнительных цилиндров, причем корцус корректирующего цилиндра соединен с « чувствительным элементом посредством верхней тяги, а щток - с подвижным рабочим элементом посредством нижней тяги - с упором, установленным с возможностью взаимодействия с укрепленными на рабочем органе переключателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Дреноукладчик | 1975 |
|
SU540016A1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| ЦЕПНОЙ РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1973 |
|
SU383788A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| Устройство для нивелировки и зачистки дна траншеи, например к многоковшовому экскаватору | 1960 |
|
SU133692A1 |
| Полуприцепной дреноукладчик и система регулирования пространственного положения его рабочего органа | 1990 |
|
SU1789614A1 |