1
Изобретение относится к устройствам для регулирования кинетической энергии винтовых пресс-молотов.
Известно устройство для регулирования кинетической энергии винтовых пресс-молотов, содержащее датчик пути перемещения ползуна и связанный с ним через передаточный механизм механический блок управления.
Однако известное устройство не позволяет оперативно н бесступенчато регулировать кинетическую энергию в заданном диапазоне, что сужает технологические возможности пресс-молотов, снижает оперативность управления ими и затрудняет программирование технологических процессов.
Цель изобретения - повышение производительности и расширение технологических возможностей.
Это достигается тем, что передаточный механиз.м выполнен в виде соединенных между собой сервозолотника и сервоцилиндра, причем, сервоцилиндр своим штоком дополнительно связан с ползушкой, на которой смонтирован датчик пути, а механический блок Правления выполнен в виде смонтированных на общем приводном валу двух барабанов, один из которых посредством гибкой связи соединен с сервозолотником.
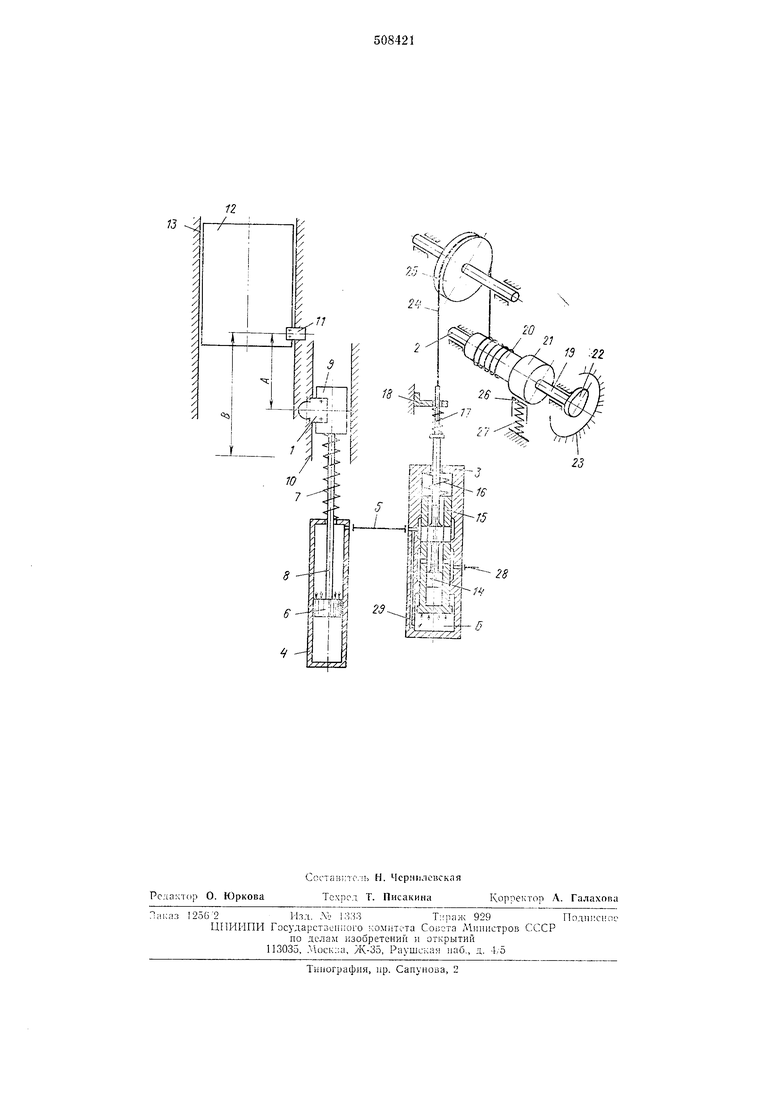
На чертеже изображено предлагаемое устройство.
Устройство сОлЧержит датчик пути 1 и механический блок управления 2, связанные между собой передаточным механизмо.м, выполненны.м в виде следящего сервопривода, состоящего из сервсзолотника 3 и сервоцнлиндра 4, соединенных между собой гибким рукавом 5.
Сервоцнлиндр 4 с(;держит иоршень 6, пружину 7 и шток 8, связанный с нолзушко 9, на которой устансм лен датчик путн 1. Пол3}шка 9 вместе с установленным на ней датчиком пути имеет возможность совершать возвратно-поступательные перемещения от сервоцилиндра 4 в направляющих 10 станины (на чертеже не показана).
Кроме того, датчик пути взаимодействует с пластиной-экраном 11 или кулачком, установленным жестко на нолзхне 12, перемещающемся в направляющих 13.
Сервозолотник 3 содержит золотник 14, иере.мещающийся в подвижной золотниковой втулке 15, тарированную плужину 16 и возвратную пружину 17, взаимодействующую с упором 18.
Блок управлен1 я 2 выполнен в виде смонтированных на общем валу 19 двух барабанов 20 и 21, рукоятки управления 22 и установленной на нульте (па чертеже не показан) шкалы 23, тарироваино по кинетической знергпп. Барабан 20 спязаи с золот1П ком 14 гибкой связью 24, перскии гоГ| 1еподви к 1ыГ1 (Злок 25, а тормозпо баргияш 21 изанмодсГ сгзхст с колодко ; 2(,i, посгОлнио при/к:;Toii к пружиной 27. Cepiюзoлoт;;l;iv с i:Or.;;iui)K) ip б()11р(),и)да 2S сосд11 ;1е1с ; с источником сжатого воздуха (не показан). Работа устройства ос ществяяетсь слсду ОИ1им образом. Р коятку у1)авлсния liOBOpaiaiiaioT на некоторый угол но часовой стрелке. При этом )ia такой же уго,т ново|1ачнг,а1отся барабаны 20 н 21. Тормозная ко,1одка 2G нод действием нр жниь: 27 удержи1и1ет барабаны 21 и 20 в заданном ноложснни до носледующего иере1-;.: очения рукоятки 22. Гибкая СВЯ31) 24, наматываясь на барабан 20, нреобразует угловые неременхения рукоятки 22 в соответствующие им лниейиые неремсщения золотинка 14. Перемещаясв вверх, золотник 14 соединяет лолость давления, связанную трубопроводом 28 с источником питания, через рукав 5 с нолос.пио серво1;илин.дра 4. lIopuieHb 6, сжимая иружииу 7, через шток 8 неремещает 11о: зун1ку 9 с установ,.теппым на 1сй датчиком пути i ua некоторую величину А относительно вер,хнего положения нлаетн ;ы-экраиа 11. Одновременно с этим воздух но каналу 29 ностуиает в нолость Б и, действуя на иодвнжну о золотниковую втулку 15, перемегцает ее так же, как и золотник 14, вверх, сжимая нри этом нружнну 16. При достижении давления, заданного линейным перемешеннем золотннка 14, золотнико1-)ая втулка 15 нсрекрывает впуск в сервоцнлиндр 4 нолость Б, н дал1ьпейн1ее перемегпение юргиия 6 нрскраи1.аетс;; вследетвне доетнження равенста снл. действующих па него со стороны давления воздуха и сжатой пружины 7. При новороте рукоятки управления 22 на некоторый угол в обратном направлении пружина 17, натягивая гибкую связь 24, перемеп1ает золотник 14 вниз. При этом часть сжатого воздуха нз цилиндра 4 и но.тости Б выпускается, i; атмосферу через щель, образовавшуюся между полкой зо;готника 14 и окном втулки 15. В упомянутых ПОЛОС ях нонижаетея давлепне воздуха, в результате чего нархднаетея paisHOBecHC норгння G с нружииой 7 и втулки 15 с пружиной 16. Пори1гн1; G начинает iiopoмс1наться Biiepx, а втулк;; 15 до тс;-; НО), HiHia не перекрыиае1ч-1 ноли1ну1Ч);: Н1.ел:;. Далее снстема занн.1а;-1 аи;;01;; р.11,;|;я;ес,.с но.тожение. 4аким образолг, ве;п1чина псремон,е;;;я 1К)рн1ня G с нолз чнкс;й 9, несхиип да .чн:; i. IH 1, всегда строго соответст1г ет Л11 1ейпо. перемен1,ени10 золотннка -: н yгл;) нс)/менлению рукоятки унравлення 22. Датчик нути 1 .тючг1е1си в uciiij мг- лвлсння нресс-молотом такн.м об)а:юм. что но, 12 соверншет пут1) А (ход ирнблнжен;1/Г; с отк.ч1очепн1)1м лавным .м. Прн л.остнженнн пс)л:,уном 12 iK-KoiOiwii заданной точки li резу.н/гате вза:1моде11С:в11Я датчика с нластино1 1-экранол1 1 1 вк.ночается главн1)Й н|мн5од. В :;том с.тучае нол:-5 н 12 разгоняется на пути н нриобретает необходимую кинетнческую энергию. Устройство позволяет илав110 изменять ио„тожение датчика нутн в диапазоне от5 ::0д;) , нзмепя5 прн этом ве.тичпп хода разгона н кннетнческ чо энергню но.тзуна 12 от л;акснмального значения до минимального. Благодаря тому, что шкала 23 нроградунрована но кине1ичесг;о11 энергии. нере1;одом рукоятки унравлепня 22 в соответствуюн ее положение можно онератнвно и 6eccT 4ieii4aTo регулировать кинетнческуо энерпно вннтовых нресс-молотов is н1нро чО.1 дпаназоне. Ф о р м у л а н .3 о б р е т е н и я Устройство ;1ля регу.тирования кинетической энергип внитозых нресс-.1олото15, содержащее датчи -; путч неремен;ения ползуна н связанный с ннм через нередаточный механизм механический 6;ioK нрав.тения, от .тичаюн1ееся тем, ч1о, с не.тыо новы 1ения нроиз1 одительности и расптп)епня технологнческих возможностей, передаточный механизм |ллнолиен 15 1И1де еоед1П енных между собой сервозолотнака н еервонилиндра с жестко закренлениой на его 1птоке ползун кой, имеюИ1,ей возможности Н0|;емсн;.снн:: .; нанравлеHiin движения нолзуна, а механический б.юк ч;р;;влення шлнолнен :; вндс смонтнрованных на обгцсм нрирюдном валу двух барабанов, один нз которых посредством гибкой связи соединен с сервозолотником, прн этом датчик путн неременгепия смонтирован на номян той нолзупже.
7J

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МУФТОЙ СЦЕПЛЕНИЯ АВТОЛгОБИЛЯ | 1971 |
|
SU289696A1 |
| Система управления пневматическим молотом | 1981 |
|
SU1063522A1 |
| Система управления и регулирования трубоагрегата | 1972 |
|
SU478763A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ ПРИ НАПРЯЖЕННОМ СОСТОЯНИИСЛОЖНОЛ\ | 1970 |
|
SU274439A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| Система управления объемным гидроприводом транспортного средства | 1986 |
|
SU1362672A1 |
| ГИДРОВИНТОВОЙ ПРЕСС-МОЛОТ | 1971 |
|
SU292727A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU651881A1 |
| Исполнительный механизм механического пресса | 1976 |
|
SU612821A1 |
| Гидравлический сервомотор к пропеллерной турбине с принудительно поворотными лопатками | 1935 |
|
SU46208A1 |