Изобретение отнсюится к устройствам для управления ковочным молотом.
Извесрю пневмоэпектрическое устройство для управления ковочным молотом, содержащее золотник управления силовым цилиндром Молота, цштвддр управления, которого соединен с золотником, пневмораспределительное устройство, соединенное с цилиндром управления и подключенное к электрической системе l.
Известное устройство не обеспечивает регулирования энергии удара при минимальном ходе падающих частей, нет. возможности прижима заготовки падающими частями молота.- .
Согласно изобретению, с целью расширения технологических возможностей молота, цилиндр управления вьпюлнен многоступенчатым, содержащим рабочую Н установочные ступени, а устройство снабжено пневмораспределителями, последовательно соединенными между собой пневмопроводом и подключенными к полости рабочей ступени цилиндра управлеВИЯ, вьрслоп из которой соответствует рабочему ходу молота, пневмораспрецелителями, подключенными в каждую подлость установочных ступеней, дросселями, подключенными к пневмораспределителям, а также управляющим устройством, вьтолненным в виде датчиков положения золотника и Подпружиненной реечной передачи, рейка которой кинематически связана со штоком, а шестерня - с переключающей пластиной датчиков положения.
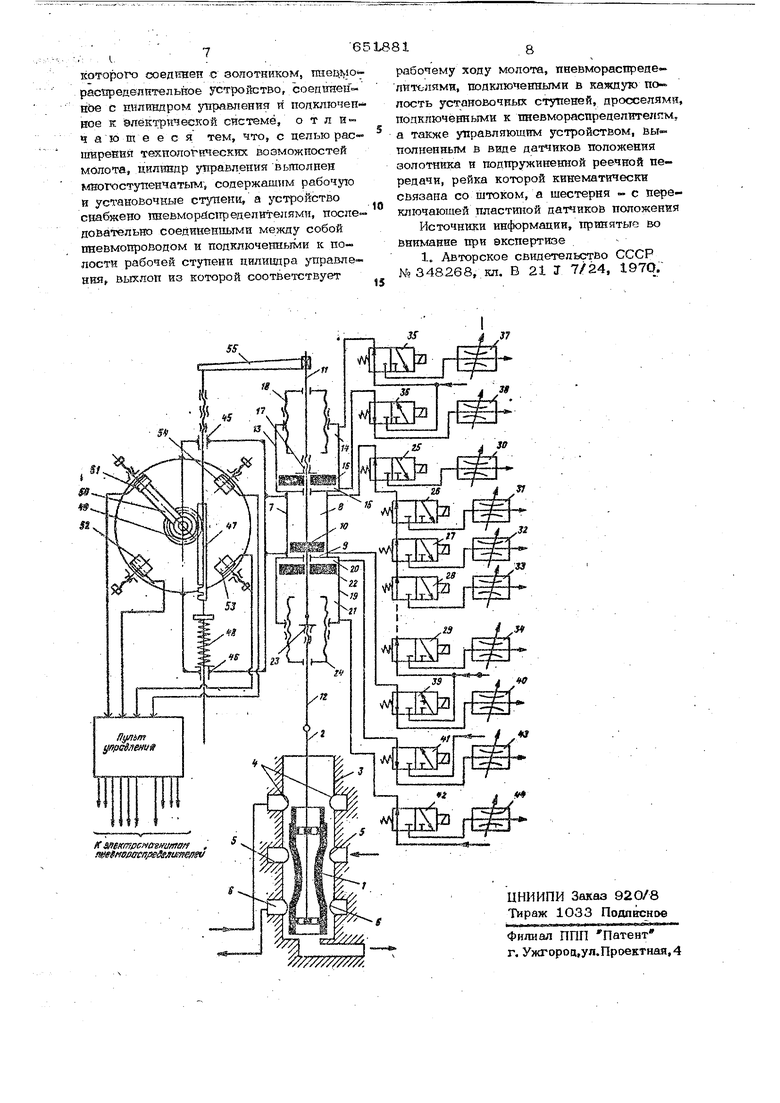
На чертеже схематично изображено пневмоэлектрическое устройство для управления ковочным молотом.
5
Устройство состоит из золотника 1, золотниковой скалки 2, золотниковой втулки 3, в которой выполнены отверстия 4, 5, 6, многоступенчатого цилиндра, содержащего рабочую ступень 7 с полос0тями 8 и 9, поршнем 10, штоками 11 и 12; уст ановочную ступень 13 с полостями 14 и 15, поршнем 16, штоковым ограничителем 17 и поршневым ограни читепем 18; устанбврчнуго ступень 19 с полостями 20 и 21, поршнем 22, штокоЁым ограничителем 23 и поршнеВым ограничителем 24j труппЬ пневмораспрецепйтелей 2S -29 (вк число может быть пеограниченньш) цодключеяа к полости 8, являющейся рабочей полостью. Дроссели ЗО-34 подключены к соответствующим . пвевмораспределвтепям 25-29 Пневморастфеделители 35 и 36 сдроссепями 37 и 38 подключены к установочной ступени 13. Пневморасйределнтель 39 и дрос сель 40 подключены к полости 9. Паев- мораснределителн 41 и 42 с дросселями 43 и 44 подключены к установочной ступени 19.
К иилшвдру крепятся направляющие 45 и 46, в которых расположены рейка 47 а пружина 48. В зацеплении с рейкой 47 находится шестерня 4 9, на вал которой укреплена переключающая пластина 5О. Вдоль окружности, образованной перемещением пластинй 50, установлены дат чики 51, S2, 53, 54 контроля конёч ных и промежуточных полоясений золотника I. Шток 12 нйХодится в эацбйлевий с зопотншсовой скалкой 2, на штоке 11 аакретшен кройШ1-ейн 5 5 воздействия на рейку 47, Все пневмораспределитали вьпюлвевы с електромагнитш м
уёравпеййем. . Устройство работает следующим об- . jpaspM,
В исходном положении золотник I находится в нижнем положении, воздухом аанопнены полости 14, 8 и 21. Падшотпиё чаоти молота наз одятся в верхнем . положении, так как через отверстия 5 и б золо-гешсовой втулки 3 воздух подается в нижшою полость силового Цилиндра молота (не показанного на чертеже). Переключающая пластина 50 находится против датчика 51, Для ведения ударов максимальной енергиа, при максимальном ходе падающих частей молота, необходиbto включить пневмораспределители 39 и 25. При STOM заполнится воздухом полость 9, а из полости 8 через пнев- мораспределитель 25 и дроссель 30 (происходит вьжхлоп) воздух отводится в атмосферу. По|эшень Ю переместится
вверх б замедления, так как отверютне росселя 30 достаточно болыиое и возух почти не встречает сопротивления , ри вьклопе т полоски 8. Шток 12 через золотниковую скалку 2 переместит золотник 1 вверх (на полную высоту хода зонотнйка 1). Воздух через бтверстия
5И 4 заполнит верхнвэю полость силового цилиндра молота, а через отверстия
6воздух из нижней полости силового йпИйдра молота отводится в атмосферу. Ударный боек молота наносит удар махсимальной анергии. При перемещении поршня 10, и соответственно щтока 11 вверх, кронштейн 55 снимает прижимное усилие с рейки 47 н, под воздействием пружины 48, рейка 47 переместится Вверх, щестерня 49 провернется и уста- aoBHj шхас-г ину 50 напротив датчика S3, который выдаст команду на отключение пневморозпределителей 39 и 25. Воздух из полости 9 через пневмораспредели- тель 39 и дроссель 40 отводится в атмосферу, полость 8 заполняется воздухом. Поршень 10 переместит (через шток 12) золотник I вниз - падающие части молота переместятся в верхнее исходное положение. Пластина 50 установится против датчика 51 дающего команду на включение пневморасиределнтеч лей 39 и 25. Датчики 52 и 53 не ока©ывайот при ВТОМ воздействия на управление устройством, так как в данный MQмент отключены, Удары будут HaHccHi-b i ся до тех itop, пока дайик 51 будет . подключен Kcxeivfe управления. Для аа- несения ударов более слабой энергии из верхнего положения падающих частей молота необходимо включить пневморастфе- делитель 39 и, например, 26. Работа
будет происходить аналогично вьгшеоп санному, однако, перемещение поршня 10 и соответственно золотника 1 вверх будет несколько замедленным, так как от верстие дросс.еля 31 будет меньше, чем дросселя 30. Падающие части молота устремятся вниз с меньшей бкорос ью, соответственно и удар будет нанесен меныией энергии. Получение ударов необходимой энергии осуществляется за счет включения одно1го из пневмораспределигелей 25,. 26, 27, 28, 29 или комбинации их включения. Причем, скорсхгть холостого хода падающих частей молота не зависим от скорости рабочего хода падающих частей молота.
Технология ковки требует нанесевия ударов различнойэнергии из различных полЬжений падающих частей Молота, т.е. из положения на весу . Указанные удары можно получить не только за счет скорости перемещения золотннка I, во также и oiT его положения в эолотвКЕО- вой втупке 3, т.е. от нлошадв окой зопотнвкового зеркала. Для нанесения уларов из положения иадаюшйх частей молота на весу не- обходиьло включить тшевморастгределитепи 35, 36 и кратковременно включить iimeBMopacnpeaenarenb 25. При этом заполнится воздухом по 1ость 15, а из полости 14 воздух через пневмораспределитель35 и дроссепь 37 отводится в (атмосферу. Через пнввмораспределитепь 2 :и дроссель 30 -воздух ИЗ полости 8 от водЕТся в атмосферу. Поршень 16 переместится вверх до упора в поршневой ограничитель 18 (предварительно уста вовленнь1й). Пневмораспределитель 27 ; йедует отключить, полость 8 вновь аа- полнится В63Духом. Благодаря штоковому ограничителю 17, переместятся вверх )Штоки 11 и 12, перемещая золотник I. ; Падающйе части молота устанавливаются В положение на весу. Пластина 50 установится против датчика 5 2, Датчик 5 2 и датчик Э4 должны быть подключены . ксхеме утфавления, Для нанесения ударов максимальной энергии из указанного положения необхо димо включить пневморасттределитель 39 и вновь включить даевмораспределитель 2 При этом, заполнится воздухом полость9, а из полости 8 воздух через Пневмораспределитель 25 и дроссель 30 отводится в атмосферу. Поршень 10 переместится, .вверх без замедления. Шток 12 перемес тат золотник 1 вверх. Падающие части Mofto-ra наносят удар по затх товке. Пластина 50 установится против датчика 54, который выдаст комйнду на отключение пневморасятределителей 39 и 25. В связи с тем, что поршень 16 поднят (в упор до ограничителя 18) при возвращения поршня 10 вниз ограничитель 17 . ;упре ся в поршень 16. Золотник 1 уставов ргся в таком положении, при котором падающие части молота остановятся в ; положении на весу. Пластина 50 установится против датчика 52, который выдаст команду на включение пневмораспредепителей 39 н 25, Удары будут .наноситься до тех пор, пока датчик 52 будет подключен к схеме управления. Для нанесения ударов более слабой внергви из положения пал.аюшвхч«зтей молота на весу необходимо включить пвевмораспределнтель 39 и, например, пневмораспределвтель 26. Работа будетсх;ущвствляты:я аналогично вышеописан вому, однако, в 8ТОМ случае перемете-. нив поршня 10 н соотвепственно эопот ssHEa I вверх будет замедлеаным, соот ветственно по заготовке будет нанесен удар менее мошной энергии. В вышеописанном случае перемешение золотника 1 вверх происходило на полную высоту золотниковой втулки 3, а при возврате золотник 1 ие доходил до конца золотниковой втулки 3 на определенное расстояние. Для ряда технологических режимов (ковка деталей максимально допустимой величины, нанесение доводочных ударов и т.д.) необходимо, чтобы золотник 1 перемещался от самого низа золотниковой втулки 3, но не доходил до верхнего конца золотниковой втулки 3. Вьтолнешие : указанных режимов осушестЬляется вклю-, чением пневмораспредепйтёлей 41 и 42. При этом поршень 22 переместится вниз до упора в поршневой ограничитель 24. Долее необходимо включить пневмораспределители 39 и 25., Поршень 10 перемещается без замедления и, как только штоковый ограничитель 23 упрется в поршень 22, прекращается перемещение поршня 10. Золотник 1 остановится в раком положении, при котором плошадь окон золотникового зер1сала обеспечит удар требуемой энергии. В этом случае к схеме управления подключены датчики 51 и 53. Для прекращения ударов необходимо указанные датчики отключить. ;При этом отключатся пневмораспредели,тели 39 и 25. В случае перехода на другой режим работы необходимо отклю « чнть пневмораспределители 41 и 42. Поршень 22 возвратится в исходное положение. Установкой поршневых ограничителей 18 и 24 можно, получить любое (по рас- стояншо) перемещение золотника 1, из- меняя в необходимых пределах площадь онон золотникового зеркала. В любом из перечисленных режимах энергию удара можно также изменять, подключая любой из пневмораспределит© лей 25, 26, 27, 28, 29, ояшочно либо в комбинации. Внедрение устройства позволит расширить технологические возможности молота н повысить качество поковок. рмула изобретения Пневмоеиектрическое устройство для управления ковочным молотом, содержащее золотник управления силовым цилинд. ром молота, цилиндр управления, шток 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU738739A1 |
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1981 |
|
SU1087242A1 |
| Паровоздушный молот простого действия | 1978 |
|
SU817142A1 |
| Машина для забивки клиньев штамповочных и ковочных молотов | 1976 |
|
SU778893A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМКОВОЧНЫМ молотом | 1971 |
|
SU295600A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ | 1972 |
|
SU348268A1 |
| Пневматический зарядчик для непатронированных взрывчатых веществ | 1989 |
|
SU1739177A1 |
| Гидропривод молота | 1973 |
|
SU613848A1 |
| Встряхивающая формовочная машина | 1990 |
|
SU1766592A1 |
