1
Изобретение относится к весоизмерительной технике.
Известная грузоприемная опора содержит силоизмерительный датчик, силопередающую накладку с двумя замкнутыми направляющими с параллельными участками в середине силопередающей накладки, заполненными телами качения с установланиоп на ннх -пятой трузоприеМНой платформы.
Цель изобретения - уменьн енне влияния касательных сил при иопользоваини одного :ч-1лонзмерительного датчика.
Это достигается тем, что силопередаюп1,ая наКладка снабжена снизу донолнительными двумя за.мкнутыми направляюнщми, залолненн1 1мн телами качения, с параллельными прямолинейными участками, сориентированиымрг иер111енднкуляр.110 к верхним, верхняя нятя снлопередаюп;ей накладки снабжена призмой, ось качения которой перпендикулярна к параллельным прямолинейным участкам верхних «аправляюниьх, а нижняя нята - призматической нодушкой, ось качения которой перпендикулярна к параллельным прямолинейным участкам ннжних направляющих.
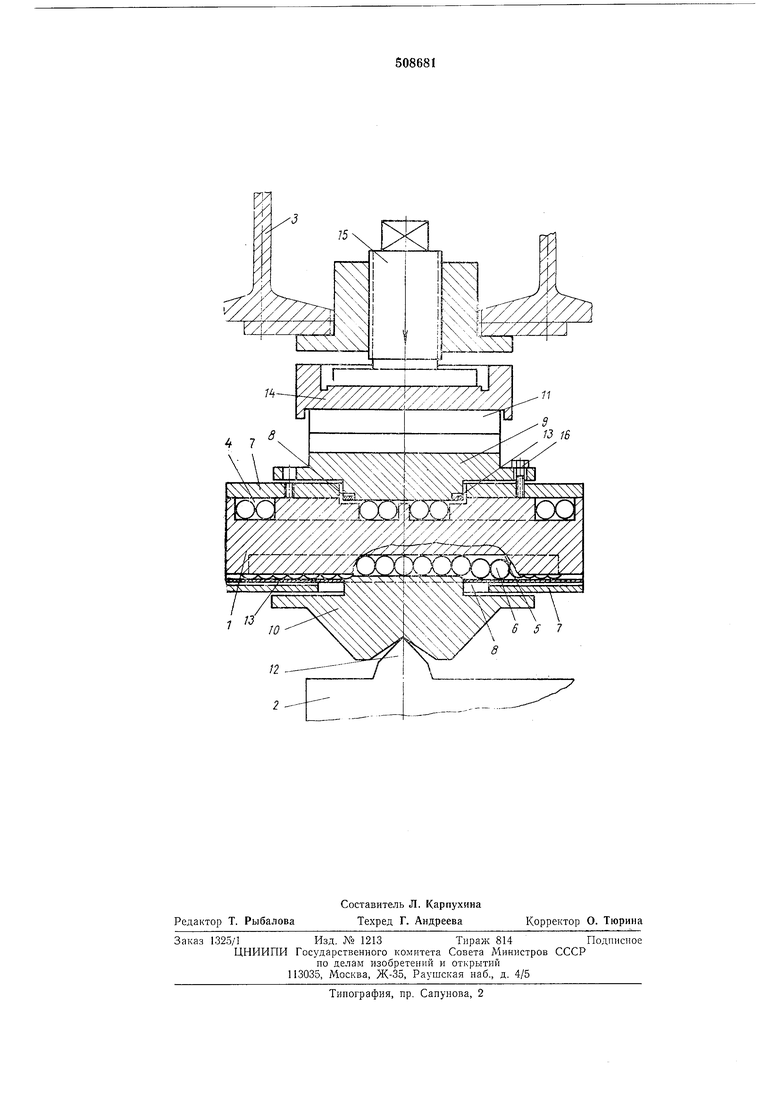
На чертеже показана принципиальная схема предлагаемого устройства.
Грузонриемная опора состоит из снлсг.ередающей накладки 1, установленной между силоизмерительным датчиком 2 и платформой 3
весов. Силопередающая накладка выполнена с двумя верхними 4 и двумя лижннмн 5 замкнутыми на;правляющнми, расположенными в горизонтальной плоскости и заполненными телами качения 6, например игариками. Верхние и нижние нанравляюп1,ие, заиолнениые шариками, закрыты 7, пмеюиимн в центральной части окна 8, в которых раснолагаются верхняя ита 9 и нижняя нята 10 с призмами 11 и 12. Верхняя и пяты уста говлен л с возможиостью 1нерекатывания во перпендикулярных направляющих.
Каждая пята снабже)1а сепаратором 13, перскрываюн1,нм полости прямолинейных наHpaBjiinoHUix С 1париками при любых позможiHhix неремеп1ениях ияты.
Верхняя призма 11 ориентирована в направлении, совпадающем с иаправ.чоннем 11)ямолппейного участка нижних нанравляюнщх 5, а нпжПяя призма 12 - в 1таправле)1нп, совпадаюп;ем с направлепнем прямолинейного участка верних направляюи их 4.
Верхияя призма 11 через накладку 14 взаимодействует с опорным винтом 15 грузоприемной илатформы. С номощью этого вилта осуп;ествляется установка платформы аю высоте и выравнивание нагрузки между силоизмерительными датчиками. Иижпюю пяту,
установленную по центру окна, закрепляют с помощью винтов 16.
Работает устройство следующим образом.
При монтаже механической части весов верхнюю и нижнюю пяты устанавливают по центру окна и закрепляют в этом положении винтами 16. Таким образов, -пяты и силопередающая накладка с щариками образуют единый блок. После окончательной установки силоизмерителыных датчиков и регулировки положения платформы по высоте вииты 16 удаляют. При этом каждая лята с сепаратором приобретает одну степень свободы - возможность поступательного движения вдоль прямолинейных участков направляющих.
Две взаимно перпендикулярные .призмы позволяют опорному участку платформы поворачиваться под нагрузкой в условиях трения качения вокруг продольной н поперечной горизо.нталь«ой осей. Движение объекта, подлежащего взвещиванию, ло весам или остановки его вызывают перемещение платформы в горизонтальной плоскости. При перемещениях платформы верхняя и нижняя пяты перекатываются по шарикам силопередающей иакладки одновременно в двух взаимно перпендикулярных лаправлениях.
Таким образом, перемещения онориых участков платформы как в вертикальной, так и в горизонтальной плоскостях протекает в условиях трения качения, что обеспечивает легкость самоустаиавливания платформы. Касательная сила, действующая при этом на датчик невелика, поскольку ее величина онределяется моментами трения качения в грузоприе мной опоре.
Незначительная цо величине касательная сила, передающаяся на датчик яерез опору, способств ет приближению условий градуировки датчика на стенде к условиям эксплуатации в промыщленных весах и более длительной стабильности метрологических характеристик датчика. Это позволяет сократить число поверок весов.
Формула изобретения
Грузоприемная опора платформенных весов,
содержащая силоизмерительный датчик, силопередающую накладку с двумя замкнутыми направляющими с параллельными участками в середине силопередающей накладки, заполненными телами качения с установленной на
них пятой грузоприамной платформы, отличающаяся тем, что, с целью уменьшения влияния касательных сил при использовании одного силоизмерительного датчика, силопередающая накладка снабжена снизу дополнительными двумя замкнутыми направляющими, занолненными телами качения, с оараллельными прямолинейными участками, сориентированными перпендикулярно к верхним, верхняя .пята силонередающей накладки снабжена призмой, ось качения которой перцендикулярна к параллельнЫМ прямолинейным участкам верхних направляющих, а нижняя пята - призматической подущкой, ось качения которой перпендикулярна к параллельным
прямолинейным участкам нижних направляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРА ВЕСОВОГО УСТРОЙСТВА | 1972 |
|
SU355506A1 |
| Грузоприемная опора весов | 1985 |
|
SU1296846A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛ | 1972 |
|
SU435463A1 |
| ЕМКОСТНЫЙ СИЛОИЗМЕРИТЕЛЬНЫЙ ДАТЧИК | 1998 |
|
RU2152010C1 |
| ВЕСЫ | 1994 |
|
RU2085869C1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Весы для взвешивания большегрузных объектов | 1991 |
|
SU1774189A1 |
| Устройство для градуировки силовоспроизводящей машины с наклонной плоскостью | 1984 |
|
SU1312420A1 |
| Весовое устройство | 1989 |
|
SU1770767A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ПРОКАТА | 2004 |
|
RU2277231C2 |