симметрично продольной оси 9 сердечник 16 с цилиндрической поверхностью, размещенные на этой поверхности в пластинчатом сепараторе 17 шарики 18 и установленную на них с возможностью поворота и осевого перемещения сегментную цилиндрическую обойму 19. Подпятник воспринимает лишь вер1
Изобретение относится к весоизмерительной технике и может быть использовано в весовых устройствах, в которых действие нагрузки, температурных и упругих деформаций грузо- приемной платформы вызывает линейные и угловые перемещения ее опорных участков и возникновение горизонтальных усилий, уменьшающих точность и надежность результатов взвешивания.
Цель изобретения - повышение точности взвешивания при действии на платформу горизонтальных усилий, а также при ее температурных и упругих деформациях.
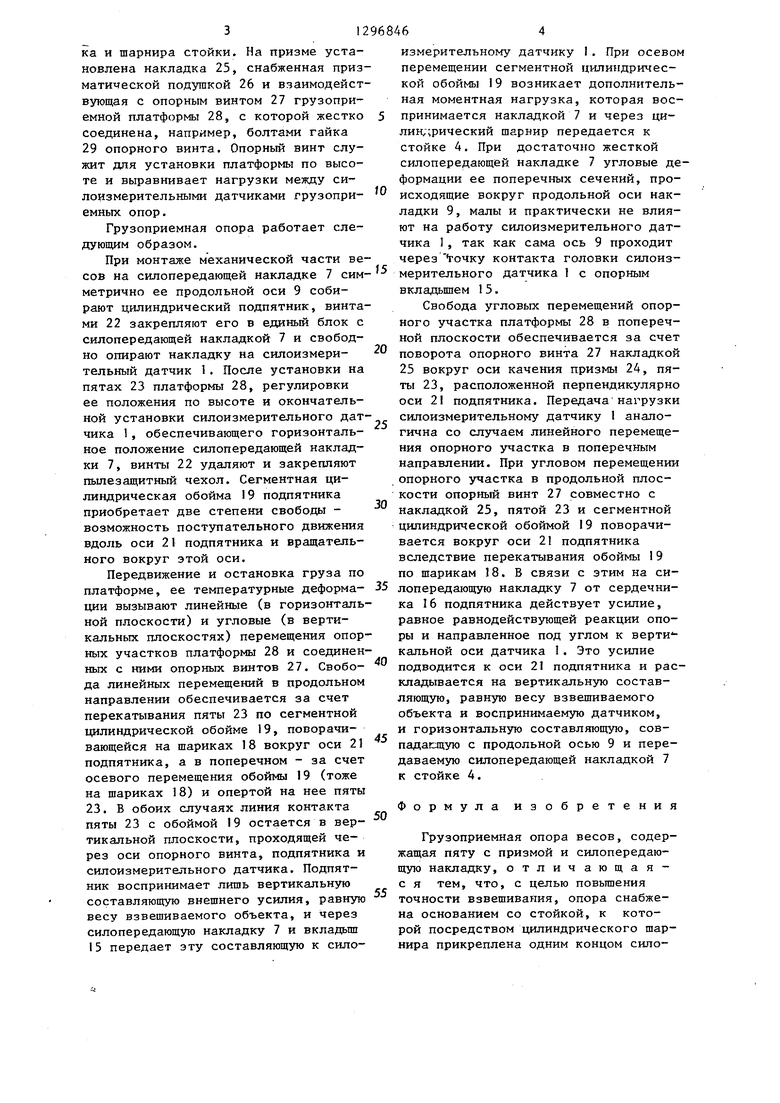
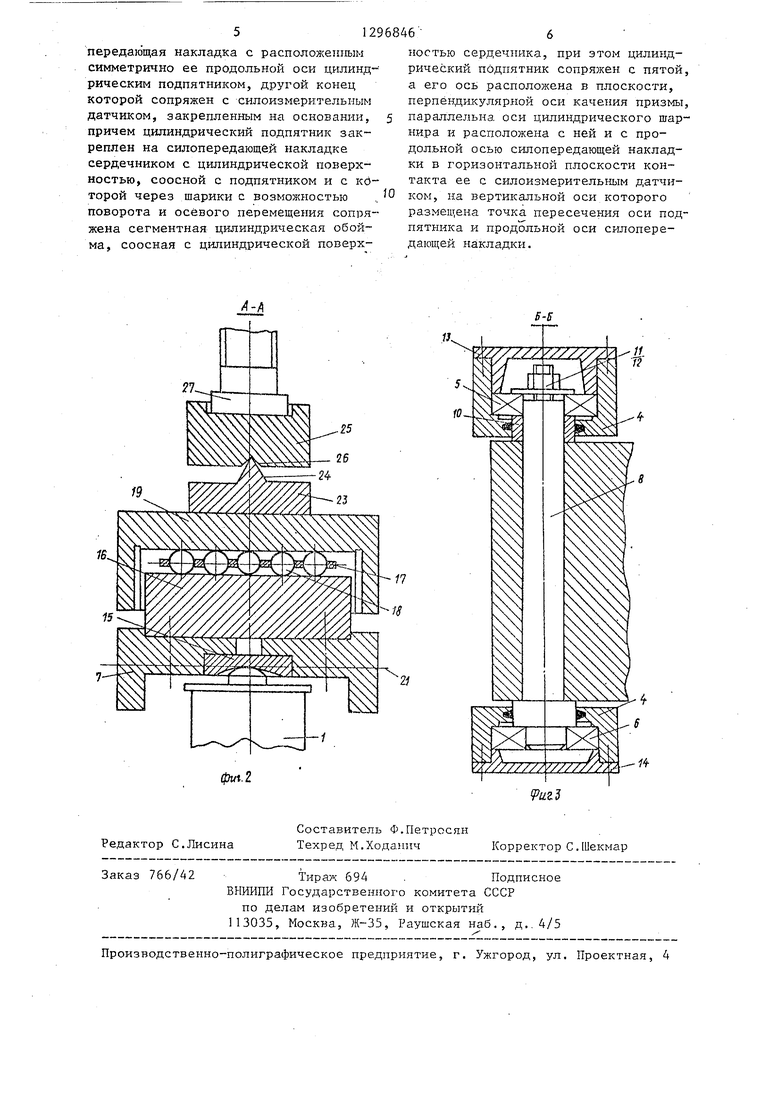
На фиг.I схематически изображена грузоприемная опора весов, продольны разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрезы Б-Б на фиг.1.
Силоизмерительный датчик 1 установлен на основании 2 с помощью устройства 3 поперечной развязки. С основанием жестко соединена стойка 4, в которой закреплен цилиндрический шарнир, состоящий, например, из подшипников 5 и 6 качения. С цилиндрическим шарниром стойки соединена с возможностью поворота силопередающая накладка 7, выполненная в форме плиты и снабженная у одного конца соединительной осью 8, закрепленной в подшипниках качения. При этом продоль--- ная ось 9 силопередающей накладки пересекает ось цилиндрического щар нира и перпендикулярна к ней. Цилиндрический шарнир, ось накладки и силопередающая накладка зафиксированы от осевых перемещений втулкой 10, гайкой 1I, шайбой 12 и крышками 13 и 14, На свободном конце силопередающей накладки снизу закреплен закален
..
тикальную составляющую внешнего усилия, равную массе взвешиваемого объекта и передаваемую через СН 7 и вкладьш 15 к силоизмерительному датчику I. Дополнительная моментная нагрузка, возникающая при осевом перемещении обоймы 19, через цилиндрический шарнир передается к стойке 4. 3 ил.
0
5
0
5
0
5
0
ный вкладьш 15, которым накладка оперта на Силоизмерительный датчик, а сверху, симметрично оси 9, размещен цилиндрический подпятник, состоящий из сердечника 6, пластинчатого сепаратора 17, шариков 18 и сегментной цилиндрической обоймы 19. Сердечник жестко прикреплен к силопередающей накладке, например, болтами (показаны оси болтов) и имеет выступающую над накладкой цилиндрическую поверх ность 20, ось 21 которой является осью всего цилиндрического подпятника. На этой поверхности размещены в пластинчатом сепараторе шарики и на них установлена с возможностью поворота и осевого перемещения сегментная цилиндрическая обойма, опорные поверхности которой также цилиндрические и соосные с цилиндрической поверхностью сердечника. Сегментная цилиндрическая обойма снабжена винтами 22, соединяющими обойму с силопередающей накладкой при сборке цилиндрического подпятника, который от загрязнения защищен пылезащитным чехлом (не показан), прикрепленным винтами к обойме и силопередающей накладке. При этом ось цилиндрического подпятника параллельна оси цилиндрического шарнира стойки и расположена с ней и с продольной осью силопередающей накладки в горизонтальной плоскости контакта вкладьш1а с силоизмерительным датчиком, ось которого совмеш,ена с вертикальной осью симметрии подпятника.
На сегментную цршиндрическую обойму оперта своей нижней плоскостью пята 23, снабженная сверху призмой 24, ось к-йчения которой перпен1щку- лярна осям цилиндрического подпятниш
.
31296846
ка и шарнира стойки. На призме установлена накладка 25, снабженная призматической подушкой 26 и взаимодействующая с опорным винтом 27 грузопри- емной платформы 28, с которой жестко соединена, например, болтами гайка 29 опорного винта. Опорный винт служит для установки платформы по высоте и выравнивает нагрузки меткду си- лоизмерительными датчиками грузопри- емных опор.
Грузоприемная опора работает следующим образом.
При монтаже механической части весов на силопередающей накладке 7 сим метрично ее продольной оси 9 собирают цилиндрический подпятник, винтами 22 закрепляют его в единый блок с силопередающей накладкой 7 и свободно опирают накладку на силоизмери- тельный датчик 1. После установки на пятах 23 платформы 28, регулировки ее положения по высоте и окончательной установки силоизмерительного датчика 1, обеспечивающего горизонтальное положение силопередающей накладки 7, винты 22 удаляют и закрепляют пылезащитный чехол. Сегментная цилиндрическая обойма 19 подпятника приобретает две степени свободы - возможность поступательного движения вдоль оси 21 подпятника и вращательного вокруг этой оси.
Передвижение и остановка груза по
20
25
30
измерительно датчику I. При осевом перемещении сегментной цилиндрической обор1мы 19 возникает дополнительная моментная нагрузка, которая воспринимается накладкой 7 и через ци- лин;;рический шарнир передается к стойке 4. При достаточно жесткой силопередающей накладке 7 угловые де формации ее поперечных сечений, происходящие вокруг продольной оси накладки 9, малы и практически не влияют на работу силоизмерительного датчика 1, так как сама ось 9 проходит через гочку контакта головки силоизмерительного датчика 1 с опорным вкладьш1ем 15.
Свобода угловых перемещений опорного участка платформы 28 в поперечной плоскости обеспечивается за счет поворота опорного винта 27 накладкой 25 вокруг оси качения призмы 24, пяты 23, расположенной перпендикулярно оси 21 подпятника. Передача нагрузки силоизмерительному датчику 1 аналогична со случаем линейного перемещения опорного участка в поперечным направлении. При угловом перемещении опорного участка в продольной плоскости опорный винт 27 совместно с накладкой 25, пятой 23 и сегментной цилиндрической обоймой I9 поворачивается вокруг оси 21 подпятника вследствие перекатывания обоймы 19 по шарикам 18. В связи с этим на сиплатформе, ее температурные деформа- 35 лопередающую накладку 7 от сердечни- ции вызывают линейные (в горизонталь- ка 16 подпятника действует усилие.
ной плоскости) и угловые (в вертикальных плоскостях) перемещения опорных участков платформы 28 и соединенных с ними опорных винтов 27. Свобода линейных перемещений в продольном направлении обеспечивается за счет перекатывания пяты 23 по сегментной цилиндрической обойме 19, поворачивающейся на шариках 18 вокруг оси 21 подпятника, а в поперечном - за счет осевого перемещения обоймы 19 (тоже на шариках 18) и опертой на нее пяты 23. В обоих случаях линия контакта пяты 23 с обоймой I9 остается в вертикальной плоскости, проходящей через оси опорного винта, подпятника и силоизмерительного датчика. Подпятник воспринимает лишь вертикальную составляющую внешнего усилия, равную весу взвешиваемого объекта, и через силопередающую накладку 7 и вкладьш 15 передает эту составляющую к сило40
45
50
55
равное равнодействующей реакции опоры и направленное под углом к верти кальной оси датчика I. Это усилие подводится к оси 21 подпятника и раскладывается на вертикальную составляющую, равную весу взвешиваемого объекта и воспринимаемую датчиком, и горизонтальную составляющую, сов- падасщую с продольной осью 9 и передаваемую силопередающей накладкой 7 к стойке 4.
Формула изобретения
Грузоприемная опора весов, содержащая пяту с призмой и силопередающую накладку, отличающая- с я тем, что, с целью повьш ения точности взвешивания, опора снабжена основанием со стойкой, к которой посредством цилиндрического шарнира прикреплена одним концом силош
5
20
25
30
измерительно датчику I. При осевом перемещении сегментной цилиндрической обор1мы 19 возникает дополнительная моментная нагрузка, которая воспринимается накладкой 7 и через ци- лин;;рический шарнир передается к стойке 4. При достаточно жесткой силопередающей накладке 7 угловые деформации ее поперечных сечений, происходящие вокруг продольной оси накладки 9, малы и практически не влияют на работу силоизмерительного датчика 1, так как сама ось 9 проходит через гочку контакта головки силоизмерительного датчика 1 с опорным вкладьш1ем 15.
Свобода угловых перемещений опорного участка платформы 28 в поперечной плоскости обеспечивается за счет поворота опорного винта 27 накладкой 25 вокруг оси качения призмы 24, пяты 23, расположенной перпендикулярно оси 21 подпятника. Передача нагрузки силоизмерительному датчику 1 аналогична со случаем линейного перемещения опорного участка в поперечным направлении. При угловом перемещении опорного участка в продольной плоскости опорный винт 27 совместно с накладкой 25, пятой 23 и сегментной цилиндрической обоймой I9 поворачивается вокруг оси 21 подпятника вследствие перекатывания обоймы 19 по шарикам 18. В связи с этим на си
равное равнодействующей реакции опоры и направленное под углом к верти кальной оси датчика I. Это усилие подводится к оси 21 подпятника и раскладывается на вертикальную составляющую, равную весу взвешиваемого объекта и воспринимаемую датчиком, и горизонтальную составляющую, сов- падасщую с продольной осью 9 и передаваемую силопередающей накладкой 7 к стойке 4.
Формула изобретения
Грузоприемная опора весов, содержащая пяту с призмой и силопередающую накладку, отличающая- с я тем, что, с целью повьш ения точности взвешивания, опора снабжена основанием со стойкой, к которой посредством цилиндрического шарнира прикреплена одним концом силопередающая накладка с расположенным симметрично ее продольной оси цилинд рическим подпятником, другой конец которой сонряжен с силоизмерительным датчиком, закрепленным на основании, причем цилиндрический подпятник закреплен на силопередающей накладке сердечником с цилиндрической поверхностью, соосной с подпятником и с которой через шарики с возможностью поворота и осевого перемещения сопряжена сегментная цилиндрическая обойма, соосная с цилиндрической поверх
ностью сердечника, при этом цилиндрический подпятник сопряжен с пятой, а его ось расположена в плоскости, перпендикулярной оси качения призмы, параллельна оси цилиндрического шарнира и расположена с ней и с продольной осью силопередающей накладки в горизонтальной плоскости контакта ее с силонзмерительным датчиком, на вертикальной оси которого размещена точка пересечения оси подпятника и продольной оси силопередающей накладки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоприемная опора платформенныхвесов | 1974 |
|
SU508681A1 |
| ВЕСОВОЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1992 |
|
RU2077033C1 |
| ОПОРА ВЕСОВОГО УСТРОЙСТВА | 1972 |
|
SU355506A1 |
| Устройство для градуировки силовоспроизводящей машины с наклонной плоскостью | 1984 |
|
SU1312420A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| ПТ Б | 1973 |
|
SU393962A1 |
| Динамометр | 1977 |
|
SU690332A1 |
| Двухзвенное гусеничное транспортное средство для перевозки длинномерных грузов | 2021 |
|
RU2765311C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТНОМ БАССЕЙНЕ | 1997 |
|
RU2113373C1 |
Изобретение относится к весоизмерительной технике и может применяться в весовых устройствах для уменьшения влияния горизонтальных сил от нагрузки, температурных и упругих деформаций платформы на работу силоизмерительного датчика с целью повьшения точности взвешивания. Для этого между пятой 23 платформы 28 и силопередающей накладкой (СН) 7 установлен цилиндрический подпятник, содержащий жестко закрепленный на СН 7 ГО со 00 ийь о fffue.i
1В.
фт.2
К РигЗ
Редактор С.Лисина
Составитель Ф.Петросян
Техред М.Ходанич Корректор С.Шекмар
766/42
Тираж 694 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д..4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Нагружающий механизм | 1988 |
|
SU1602635A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грузоприемная опора платформенныхвесов | 1974 |
|
SU508681A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
